
高德在提升定位精度方面的探索和实践
2019杭州云栖大会上,高德地图技术团队向与会者分享了包括视觉与机器智能、路线规划、场景化/精细化定位时空数据应用、亿级流量架构演进等多个出行技术领域的热门话题。现场火爆,听众反响强烈。我们把其中的优秀演讲内容整理成文并陆续发布出来,本文为其中一篇。
阿里巴巴高级地图技术专家方兴在高德技术专场做了题为《向场景化、精细化演进的定位技术》的演讲,主要分享了高德在提升定位精度方面的探索和实践,本文根据现场内容整理而成(在不影响原意的情况下对文字略作编辑),更多定位技术的实现细节请关注后续系列文章。
以下为方兴演讲内容的简版实录:

今天要分享的主题是关于定位的场景化、精细化。高德定位,并不只是服务于高德地图本身,而是面向所有的应用开发者和手机设备厂商提供定位服务。目前已有30万以上的APP在使用高德的定位服务。
用户每天会大量使用定位服务,比如看新闻、打车、订外卖,甚至是购物,首先都是要获得位置信息,有了更精准的位置信息,才可能获得更好的服务体验。
高德地图有超过1亿的日活用户,但是使用定位的有好几个亿,每天的定位请求数量有一千亿次。如此大的数据量,高德定位服务可以保持毫秒级的响应速度,我们在这里面做了很多工作。此外,我们还提供全场景的定位能力,不管为手机、车机还是任何厂家,都能提供位置服务。
我今天从四个方面介绍,分别是:
- 定位面临的挑战
- 高德地图全场景定位
- 分场景提升定位精度
- 未来机遇
定位面临的挑战
大家可能都知道GPS,GPS在大部分情况下可以提供很好的精度,但是对于某些场景还是不够,比如驾车,GPS给出的精度大概是10米,如果仅靠GPS定位甚至无法区分出在马路的哪一侧。
第二个场景是在室内,室内收不到GPS信号,这样的场景下如何实现比较准确的定位?第三个场景是如何在精度和成本之间取得平衡,因为不可能为了追求一个很好的精度去无限投入成本。只有通过海量大数据挖掘,算法和数据质量的提升,达到效果的持续优化,才能达到最终对各种场景的全覆盖。
有很多技术可以选择,除了GPS定位,还有基于网络定位、Wifi基站,原理就是通过扫描到的Wifi和基站列表、信号强度,进行数据库查找,找到Wifi位置,定位。
除此之外还有惯性导航定位,惯性导航是一种相对定位的方式,可以不断计算跟上次定位的偏移量,有了初始定位之后,根据连续计算可以获得最终的位置。
还有根据地图匹配定位,比如GPS的点落在一个湖里,显然是有问题的,可以通过地图匹配,找到最近的一条路,这时候精度就得到了提升。
还有一些定位方式最近几年变得很热门,例如视觉、雷达、激光,自动驾驶的概念推动了这些技术的发展,这些方式各有各的定位精度和差异性。例如视觉,在实践中往往需要大量计算和存储的开销。
很多时候,还是要基于Wifi的定位,获得初始定位,然后在不同场景下不断的优化,通过不同的数据源提升精度。
高德地图如何实现全场景定位
高德主要分为两个业务场景,手机和车机。在手机上主要是GPS+网络定位。驾车的场景下,我们还会做一些根据地图的匹配,实现对特殊道路的支持。
以往,很多用户会反馈说会遇到GPS信号不好,导致无法定位、无法导航的情形。约有60%的情况是因为用户位于地下停车场或者在隧道里,约30%的情况是附近有严重的遮挡,比如在高架桥下,或者在很高的高楼旁。这些都会造成对GPS比较严重的遮挡。
我们打电话的时候,连接的基站可能就在一公里范围内,这样短的距离传输信号还时常会出现信号中断,如果GPS信号距离两万多米的高度,出现问题的可能性还是存在的。所以必须通过其他方式,例如地图匹配或者惯性导航来对GPS进行补充。
在室内的场景,需要解决的是如何去挖掘Wifi基站的位置,提升精度。
在车机的场景,我们会结合更多来自于汽车的数据输入来帮助我们。
定位的基础能力
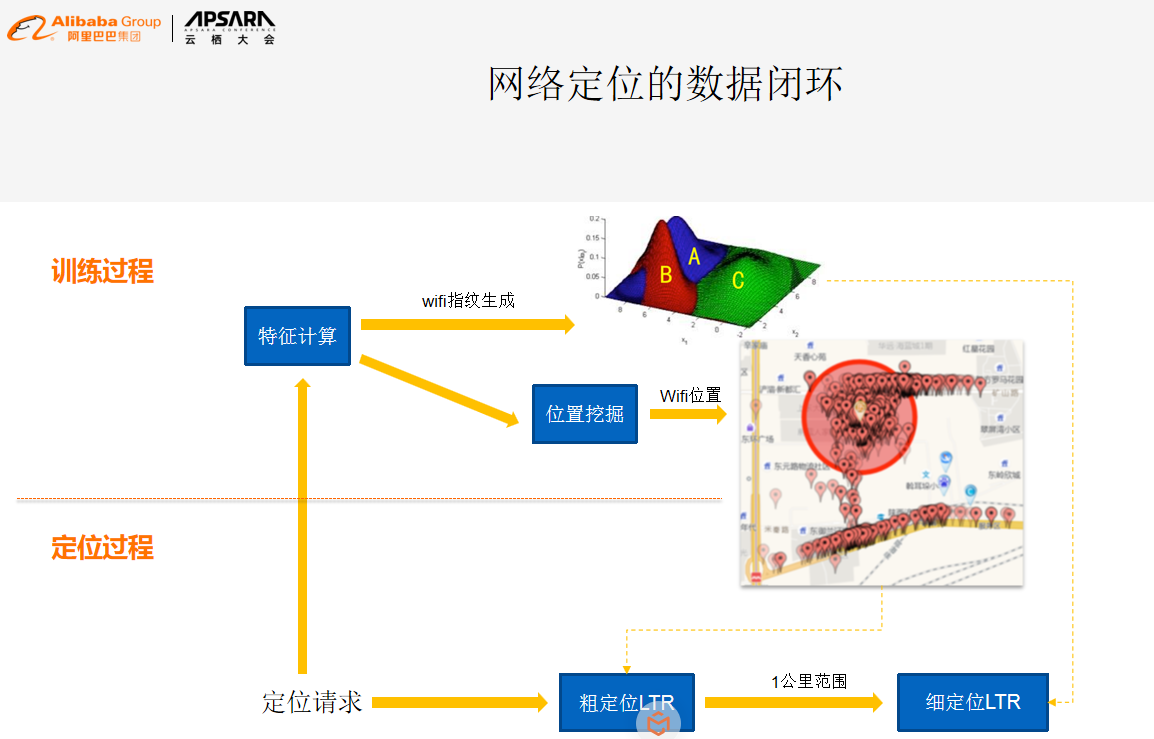
网络定位本质上是一个数据闭环,每个人在定位的时候,实际上是发送了本身的基站和Wifi列表,发送的数据一方面可以用来定位,另一方面也可以用做数据训练。数据训练主要产出两种数据,一个是Wifi基站的位置,通过数据挖掘,我们就可以获得大概的位置(初始定位),但是精度比较差。第二个是产生更详细的空间信号强度分布图。有了这个图以后,就可以进行比较精准的定位了,根据信号强度判断我距离这个基站和Wifi有多远,从而对精度进行改进。
数据闭环完成以后,就是一个正向的反馈,数据越多,训练结果越多,定位结果就越准确,从而吸引更多的用户来使用(产生数据)。这就是通过数据挖掘,不断提升精度的闭环。
算法部分,我们也经过了不断的迭代。最早是基于经典的聚类模型,就是扫描基站Wifi列表,聚类以后选择其中一处作为我的位置,这个方法效率比较高,很快可以得到结果,但是精度很差。
第二步,我们把空间进行了精细的划分,在每个网格内统计一些基础的特征,比如历史上的点定位的数量、定位的次数、Wifi的数量等等,计算出一个网格的打分,再对网格进行排序,最后你的定位点就是这个网格。通过这种方法,30米精度的占比提升了15%。
这种方法也有局限性,人工调参带来的收益是有限的,调到一定程度就没办法再提升了。所以,第三步就是把机器学习算法引入这个过程,利用监督的学习提升到最佳的模型和参数,这样可以在特定场景下获得显著提升。主要的场景就是解决大误差的Case。
一个比较典型的问题就是,扫描到的基站Wifi可能只有一个基站、一个Wifi,没有别的信息了。这个基站Wifi又离的特别远,无论选择基站还是Wifi,都有50%的概率是算错了。有监督学习,就可以把海量的配送拿出来,精细化的挖掘细微的差异,达到全局最优的效果,在某一情况下选基站,某一情况下选Wifi。把犯错的比例降低了50%。
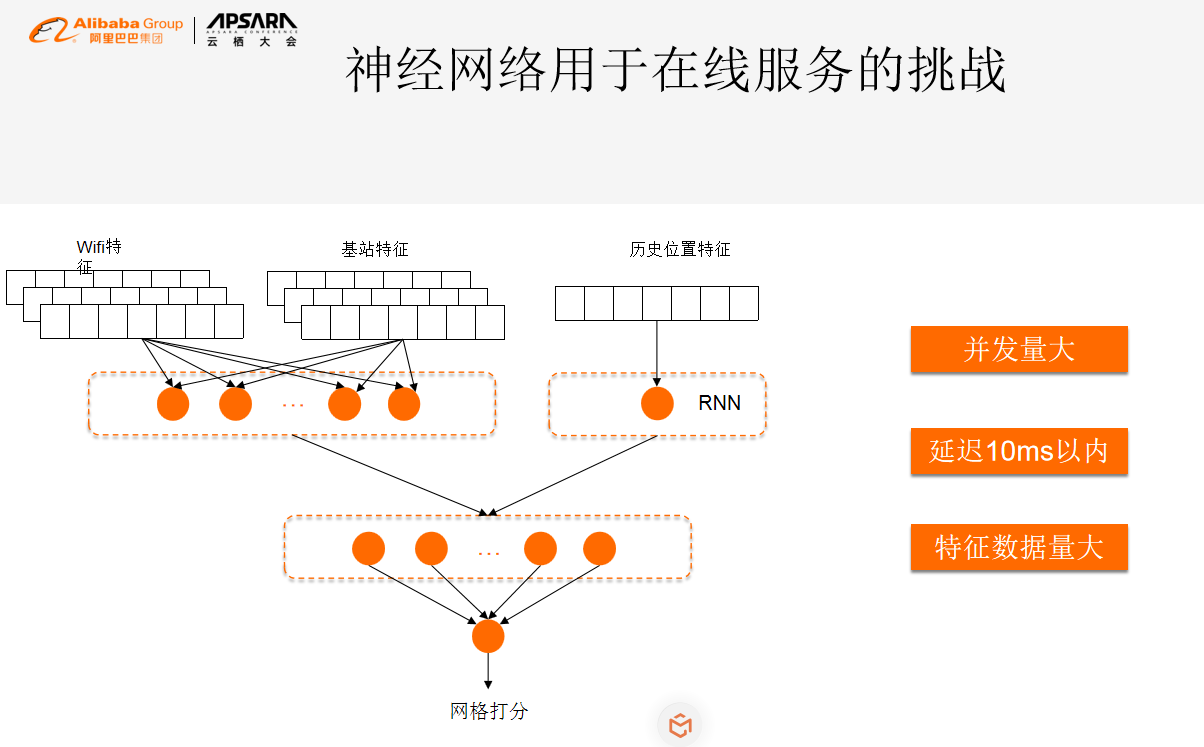
上图就是我们的线上神经网络的模型,神经网络用于在线服务现在是比较流行的方式,我们在这里实际上是利用基站和Wifi的信号强度和混合特征作为特征输入,同时把历史位置也作为序列放进来,这个历史位置特征会放入一个RNN模型,预测现在的位置,使用预测的结果和基站Wifi列表特征,再往下预测,最后是网格的打分。最终输出一个概率最高的网格作为输出。
这个方法最大的挑战并不是在算法,而是算法效果和工程上的可实现性,如何能够达到最优。高德每天有上千亿次的调用,延时要在10毫秒以内。
另外,数据量很大,所有的数据,每条都有很多特征,在线的数据存储大概有几十个TB,这个数据量也不可能放在在线服务里做,所以要做相应的优化。
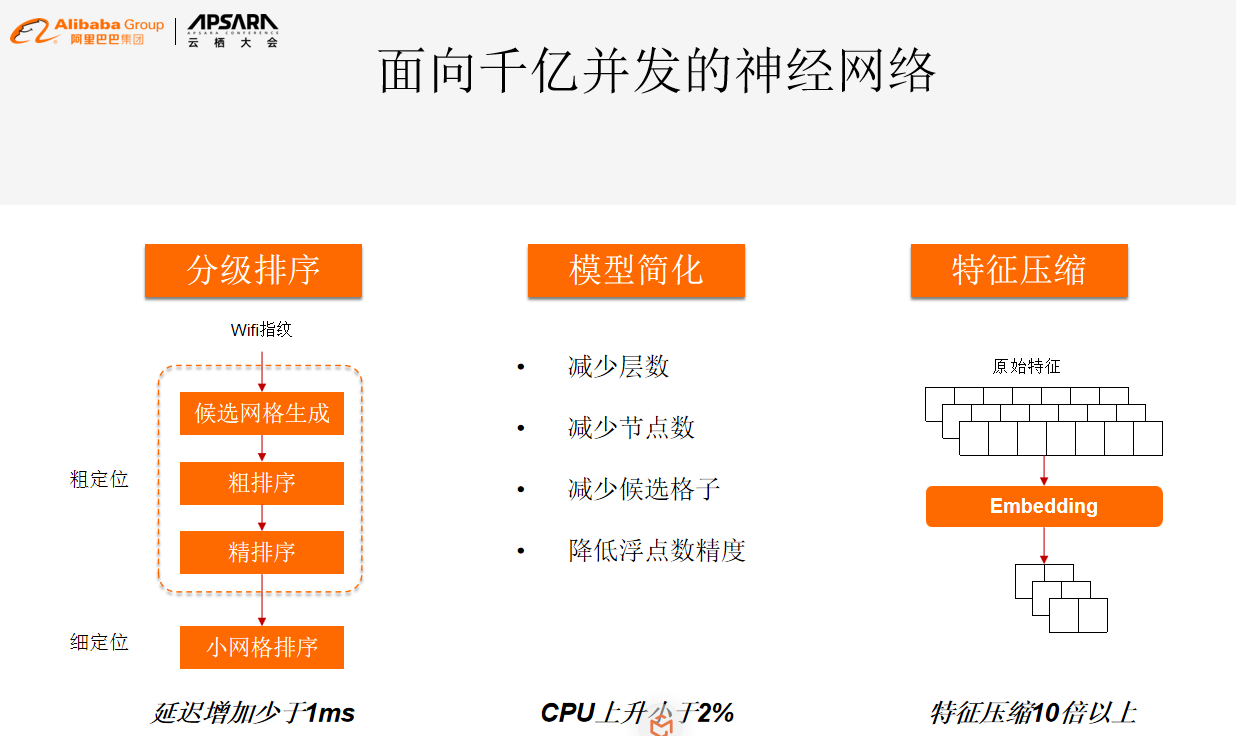
我们做了三个方面的优化,第一是分级排序。把定位过程变成一个显微镜步骤,先做一个很粗略的定位,然后逐步收敛到很精确的位置。粗略定位的时候可以用很大的网格,用很少的特征,快速过滤掉一些不可能的位置。
然后,在很精细的网格里,用更多的特征、更多的网格进行排序。通过这种方法,就可以极大提升计算的效率,把一些不必要的计算过滤掉。
第二是模型简化。虽然深度学习的效果很好,但是不可能在线上用很复杂的模型,我们通过减少层数和节点数,把浮点数精度降低。
第三是特征压缩。这里面有特色的一点是我们根据模型进行的压缩,原始特征的输入的数量是很大的,我们增加一个编码层,输入的特征经过编码层以后,只输出两个字节的特征。我们把在线、离线的数据处理好以后,最后在线只存储两个字节。通过这种方法,在线特征的数据量降低了10倍,降低到1个TB以内。以上是解决的几个主要问题。
不同场景下的精度提升
在室内场景,经常会定位到室外去,这跟刚才介绍的序列流程是有关系的,因为采集过程更大概率是在室外,序列后的Wifi位置都在马路上,所以定位最后的概率也是在马路上,但是这对用户体验是很差的。比如打车,可能在室内叫车,定位在对面的马路上,但这条马路可能是不对的,需要找到我在哪个楼里,离哪个道路比较近。
怎么解决这个问题?一种方法是通过数据采集,就是在室内进行人工的采集,使训练数据的数据分布跟实际的预测数据分布保持一致,这种方法当然精度比较好,但是主要缺陷是成本非常高,目前也只是在热门商场和交通枢纽进行这样的数据采集,这肯定不是一个可扩展的方法。
我们的方法是想通过引入更多的数据优化定位过程。如果能基于地图数据挖掘出Wifi和POI的关系,就可以用数据关联提升精度。比如扫到一个Wifi,名字叫KFC,有一个可能就是你在肯德基里,这个方法比较简单。实际用的方法会更加复杂。

我们是利用Wifi信号的分布反向挖掘出位置,上图里蓝色的部分就是楼块的位置,红色的点是Wifi的真实位置,绿色的点是采集到Wifi的位置,绿色越亮,代表这个地方的信号强度越强,通过这个图放入图像学习,比如用CNN挖掘出它的位置以后,我们就可以建立一个Wifi跟楼块或者跟POI的关联,通过这个方法可以使全量Wifi的30%都能关联上相应的POI或者楼块。
在线的时候需要知道用户什么时候在室内,什么时候在室外。我们用的是利用信号强度特征做区分的算法,在室内室外扫描到的Wifi列表和强度会有很大差别,通过这个差别可以训练出模型。绿色的点预测为室内的点,蓝色的点是室外的点。通过这种方法,定位精度提升了15%。
驾车场景,导航过程中可能会遇到的常见问题。第一个问题是无法定位,开到停车场或者有遮挡的地方,第二个场景是点会有漂移,因为GPS受到建筑或者其他遮挡的时候,会产生精度下降的情况。第三种情况是无法区分主路,可能会错过路口。
对于以上问题,我们采用的是“软+硬”融合定位,软的部分包括两部分,一个是基于移动定位,第二个是根据地图匹配。经过两个“软+硬”结合之后,我们在GPS 10米精度做到90%以上,可以实现高架主路和停车场的持续导航。
这里面关键的就是如何实现融合定位,比较有特色的一点就是我们做车机的传感器模块是低成本的,成本不到100元,其他类似产品成本是比较高的,可能需要几千块钱。使用低成本的器件,能够更容易得到普及。缺点是精度比较差,定位准确性差一些。要通过软件的方法弥补硬件上的缺点。
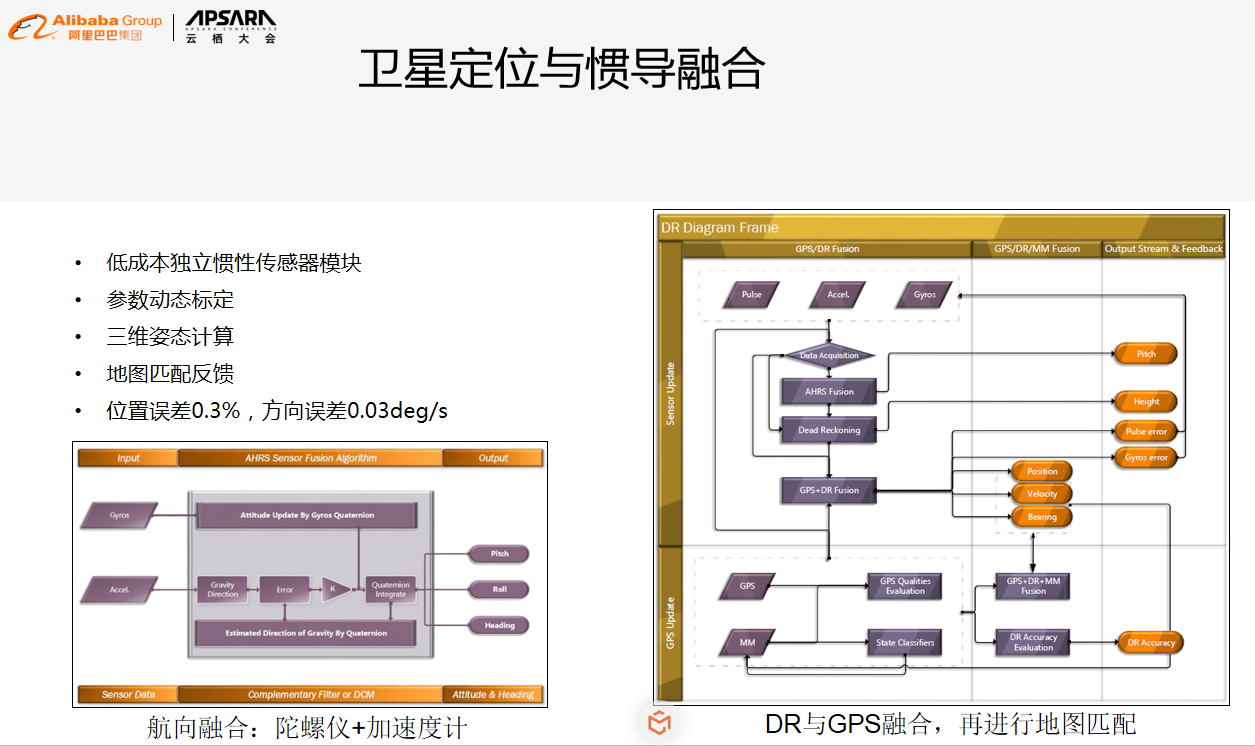
我们的解决办法分成三个步骤,首先是航向融合。陀螺仪有相对的角度可以算出来,加速器可以算出地球引力的方向,这两个结合以后就可以建立一个滤波方程,把真实的方向持续不断的输出。第二,把三维的方向和GPS的结果进行一次融合,就可以计算出修正后的位置。第三步,再和地图匹配做对比,因为我们知道它的方向、位置以后,就知道它是在上坡还是下坡,是在高架上还是高架下。还有一点,匹配后的位置跟GPS原始位置做对比,如果差别很大,GPS可能发生了偏移,我们就把GPS舍弃掉,只用惯性导航推算。
这里面有三个特点,第一,参数动态标定,不需要对器件有初始的标的,我们通过三维的计算出方向,用地图匹配反馈。关于地图匹配的部分,核心是我们利用HMM的算法进行位置的匹配,推算每个点的道路。这里面比较关键的概率,一个是发射概率,一个是位置转移概率。
第二,我们把角度也考虑进来,角度的变化同样用于决策转移概率,这里面跟位置转移概率的区别就是引入了速度做变量,不同的速度下,发生转角的概率是不一样的,速度慢了可能会转向,速度快也可能转向,所以我们针对每个速率都有一个曲线。
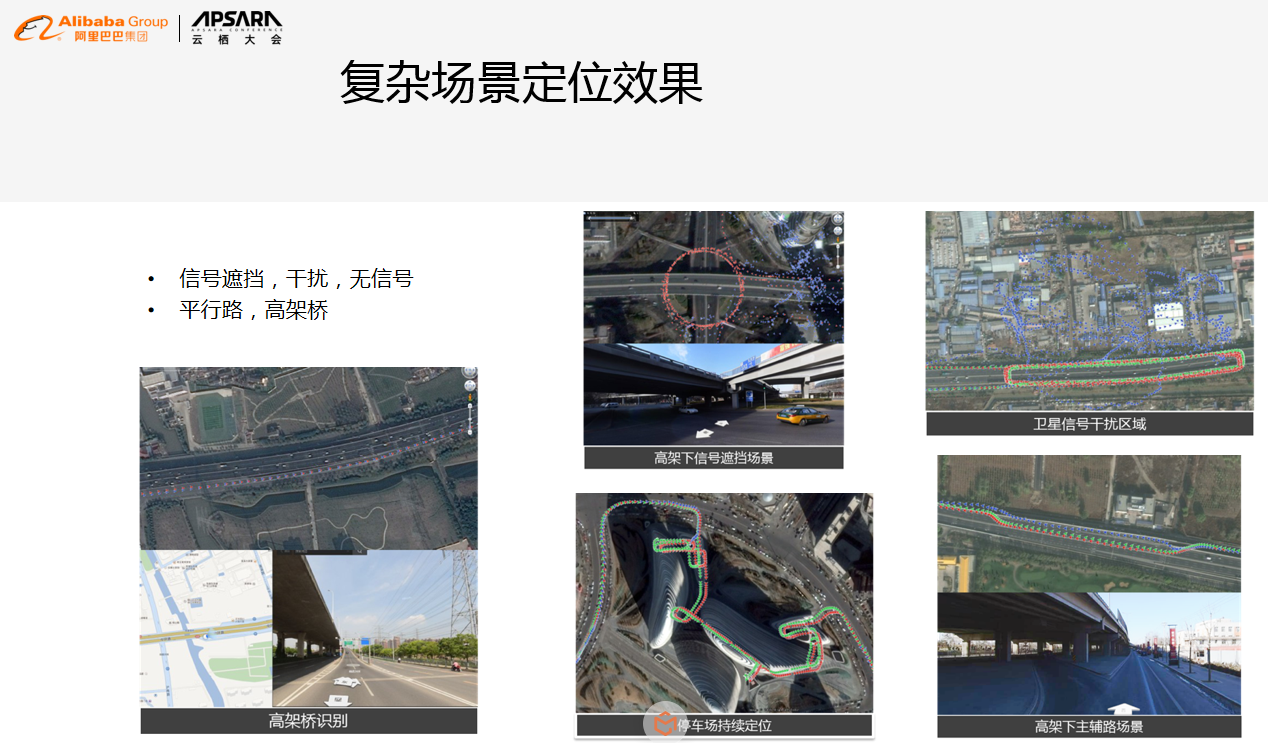
上图是定位效果,红色的点是实际修正后的轨迹,蓝色的点是原始的GPS点,下面是在高架下的效果,可以看到高架下GPS点已经非常发散了,飘的到处都是,但是修正之后跟绿色的点是重叠的。下面的图是在停车场里,在停车场进去的时候,蓝色的点就已经消失了,但是红色的点可以很好的还原出用户在停车场里持续的轨迹。
高精定位方面,高德主要建立两种定位能力,一种是基于图像定位,一种是基于融合定位。图像定位是只用图像就可以形成比较好的分米级精度,融合定位主要是引入了两个新的定位技术,一个是VSLAM,一个是差分GPS。这两个方法分别应用于有GPS和没有GPS的情况,可以提供很好的精度。VSLAM可以做到误差很小,因为可以有图像的方法进行修正。
自动驾驶是一个方向,并且需要从辅助驾驶过渡到自动驾驶,但系统性变化到来之前会有阶段性的变化,就是服务于人的导航服务的精细化,即车道级导航。车道级导航需要高精地图,至少是分米级的精度。
对未来定位技术发展的理解。基础能力部分,我们认为5G的出现会为定位提供一种新的可能性,因为5G的频率比4G更高,波长会更短。它可以测距,以前基于基站和Wifi的定位都是基于信号强度的。但是5G支持了测距以后,它就可以提供一个很好的精度,所以可能会出现一种方式,基于5G的定位可以达到类似GPS的效果。

第二是融合定位,随着各种新的数据源不断出现,用新的算法去发挥不同数据源的特点,从而达到整体效果的提升。驾车部分,视觉定位和差分GPS技术的逐渐普及。室内部分,有超宽带的定位,除此之外还有蓝牙和Wifi的精准定位。在最新的技术标准里,也都支持了测距和测角的技术,也就是未来新的蓝牙或者Wifi的APP,可能就能提供一部分的定位能力。
所以,未来10年内,我们可能会看到这几种方式相互融合,精度会得到质的改变。以上就是我介绍的内容,谢谢大家!

关注高德技术,找到更多出行技术领域专业内容
 浙公网安备 33010602011771号
浙公网安备 33010602011771号