通俗易懂理解“万向锁”
网上关于万向锁的解释实在难以理解,摸索一番后有了比较直观的思考,记录如下:
在三维空间中表示旋转有4种方式:欧拉角,轴角旋转,旋转矩阵,四元数。
万向锁,是用欧拉角表示旋转时产生的一种问题,这个问题是可以解决的,只是很麻烦。
首先,欧拉角的旋转遵循一个顺序,比如x-y-z,y-x-z,x-y-x... 只要不是连续2个轴连着就可以,共有12种旋转顺序。
其次,旋转欧拉角的方式有两种,一种是绕着世界坐标系旋转,也叫“外旋”;另一种是绕着物体本身的局部坐标系转,也叫“内旋”,内旋的本质是先旋转坐标轴,再旋转点,由于我们最终描述点的位置是在世界坐标系上,因此内旋最终会转换为外旋,具体转换公式参考欧拉角旋转矩阵内外旋的等价性 - 简书 (jianshu.com)
这里理解内旋和外旋的关系至关重要,为了讲明白,举一个简单的例子:
有一架飞行中的飞机,我们在机头画一个点,不管飞机如何内旋yaw-roll-picth,最终我们需要知道的是这个点在世界坐标下的位置。由此可见,内旋只是方便操作的一种方式(对于飞机来说方便飞行员操作),但最终还是要转成外旋计算。
万向锁产生的原因,跟选项顺序和旋转方式(内旋-外旋)密切相关,也跟我们期望有关。
我们期望的是:
1.在世界坐标系中,旋转能有3个自由度,也就是在外旋看来,x/y/z三个方向都能旋转,这个是毋庸置疑的;
2.内旋的表示,转换成外旋也能有3个自由度,这在绝大部分情况下都是成立的,而极少的情况即“万向锁”。
我们以Unity的内旋(Local)为例,它的旋转顺序是y-x-z:
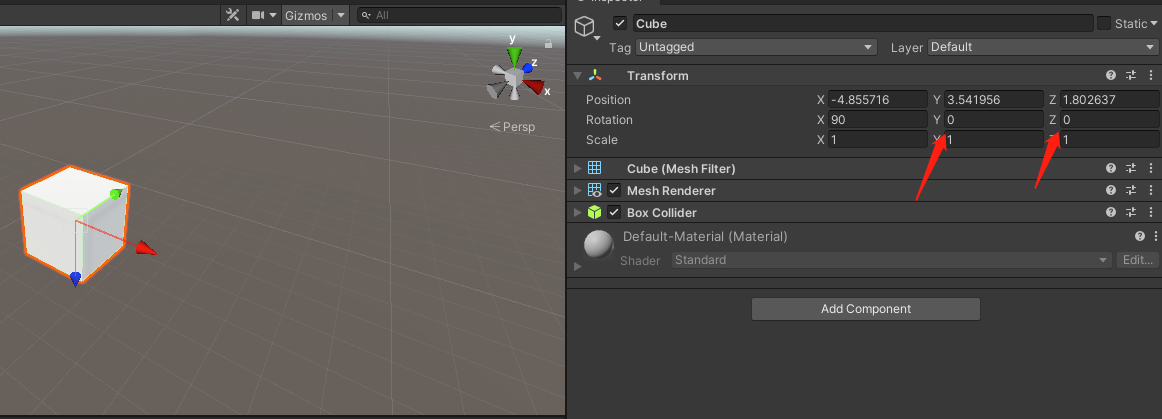
当我们内旋Ry(0°)Rx(90°)Rz(0°)时,即把中间的坐标轴x旋转了90°后,发生了这样的现象:
旋转前:局部y轴与世界y轴重合,局部x轴与世界x轴重合,局部z轴与世界z轴重合;
旋转后:局部y轴与世界z轴重合,局部x轴与世界x轴重合,局部z轴与世界y轴重合;
于是问题产生了:
先内旋y轴,这时旋转的是世界坐标系y轴 -> 再内旋x轴,局部坐标系的z轴变成了世界坐标系的y轴 -> 最后内旋z轴,旋转的是世界坐标系的y轴
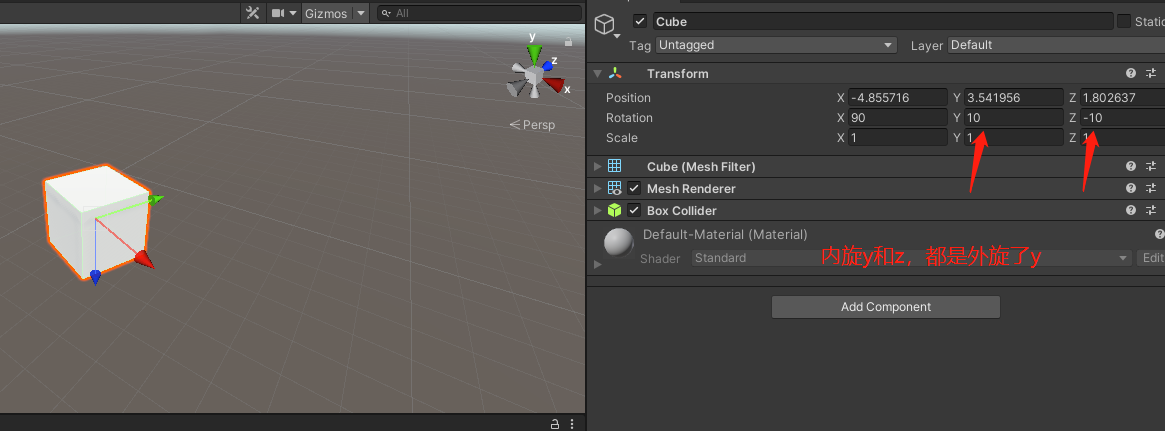
发现了吗!当中间x轴被内旋90°时,无论内旋y或内旋z,实际上都是外旋了世界坐标系的y轴,而世界坐标系的z轴,根本无法被旋转!
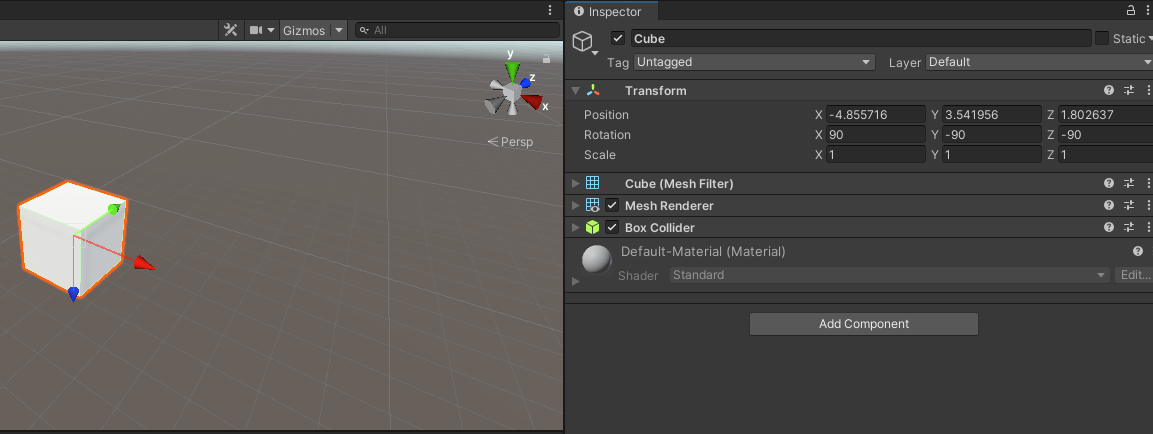
那么要如何才能使世界坐标系的z轴旋转呢?有2种方式:
1.x轴和z轴也额外旋转-90°,即Ry(-90°)Rx(90°)Rz(-90°)等价于Ry(0°)Rx(90°)Rz(0°);
2.当x轴内旋为90°时,旋转顺序改成y-x-y。
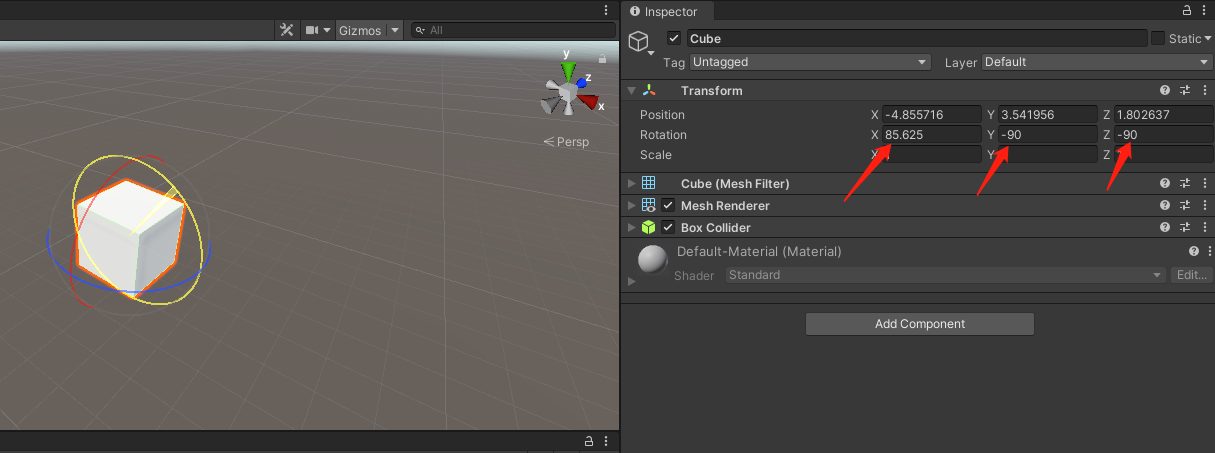
无论哪种方式,都要处理临界点,在诸如插值等需要动态调整欧拉角时及其不便利。
总结:
万向锁是用欧拉角表示旋转时,内旋必然会产生的问题,表现为在外旋(世界坐标系)上少了一个旋转自由度,解决方法是处理临界点。用欧拉角表示静态的“朝向”是没有问题的,只是用在插值等动态变化的旋转时会有极大的不便。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号