
齐次坐标
*为什么要引入齐次坐标?
缩放和旋转变换都可以用矩阵乘法的形式计算,而平移比较特殊,如果不增加维度,则必须用另外一种形式表示。
以二维为例,点和矩阵的表示都是二维的,无法用矩阵乘法的形式表示平移变换,因此需要加多一个维度,从二维变为三维。同理,三维的矩阵需要增加第4维。
*齐次坐标的表示方法?
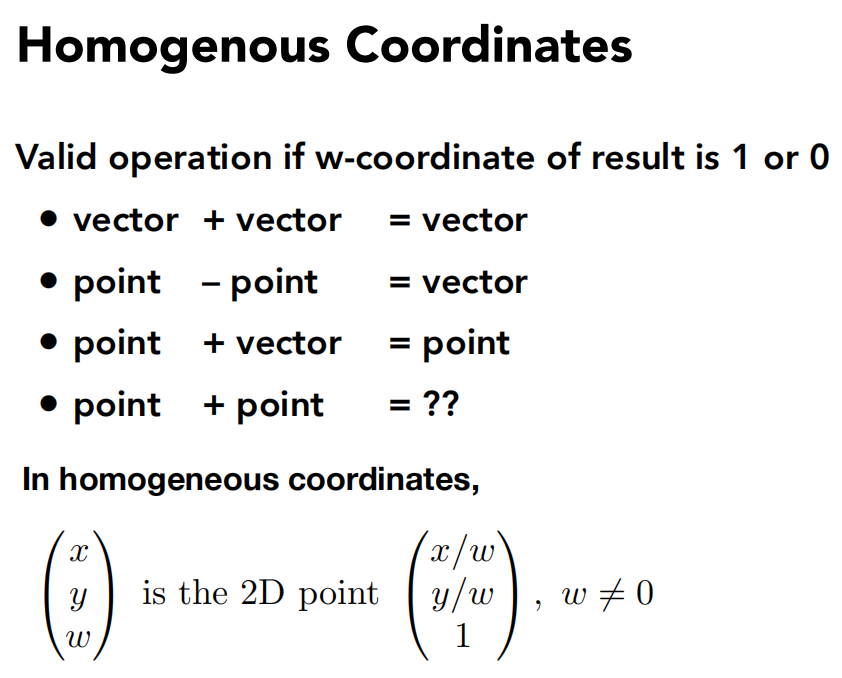
对于点:加多一个维度,数值为1
对于向量:加多一个维度,数值为0
因为向量具有平移不变性 (即平移一个向量后,得到的还是原来的向量),所以第N+1维需要为0。
*引入齐次坐标后,点和向量的计算关系?
向量 + 向量 = 向量(两个运动先后行驶)
点 - 点 = 向量 (点A到达点B经过一个运动)
点 + 向量 = 点 (点A经过一个运动到达点B)
点 + 点 = 中点

 浙公网安备 33010602011771号
浙公网安备 33010602011771号