
图形学-光线追踪-空间划分
一般场景中的模型都是由三角形构成的,且数量非常多;同样用光线追踪的方式计算着色,由于光线会经过反射、折射等,光线的数量也非常多。 那么,如果简单粗暴的遍历计算所有的光线与所有三角形是否相交,计算量将大得惊人。
于是人们想到用空间划分的方式解决这个难题,即把整个场景空间划分成很多区域,先计算光线是否与这些区域相交,如果相交再计算光线是否与这些区域中的三角形相交。这里的空间指的是包裹着整个场景或某些物体的范围,叫做包围盒,基于直角坐标系为了计算简单一般用轴对称包围盒,也叫AABB。
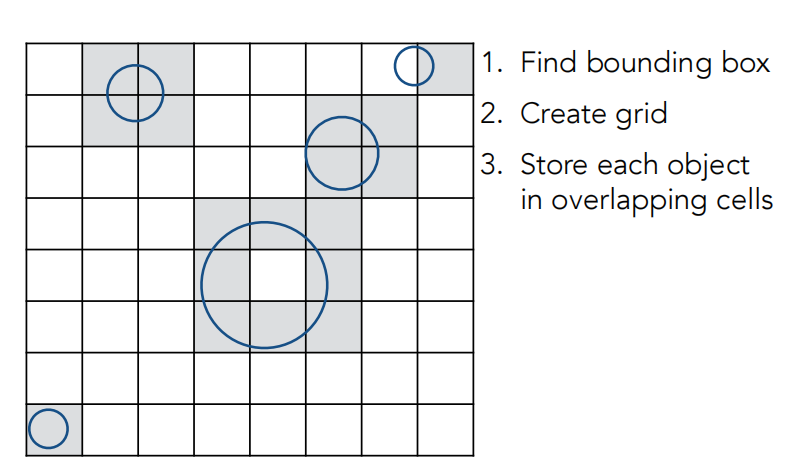
具体步骤如下:
1.找到所有物体的包围盒;
2.把包围盒分割成均匀的小格子;
3.找到每个格子包含哪些物体;
4.计算光线经过的格子,如果格子中包含物体,则求光线和物体(三角面)是否相交。
优化
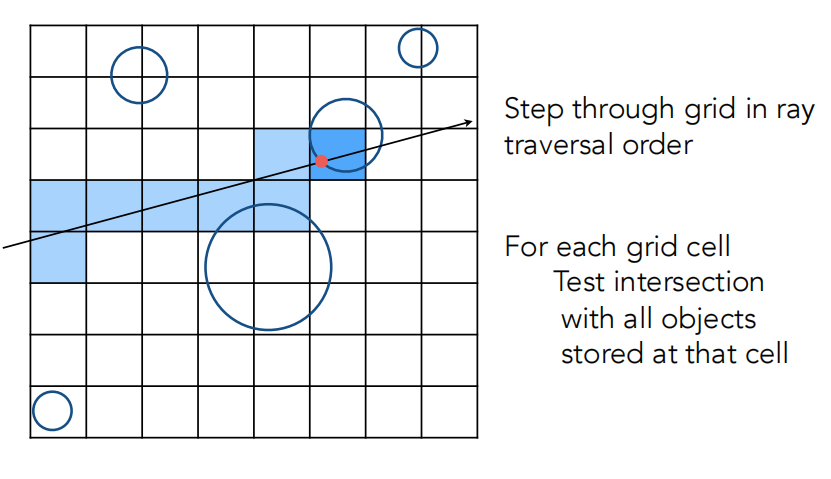
简单分格子的空间划分确实能降低计算复杂度,但对于大片空出的场景,会出现“茶壶在运动场”问题。

如图所示,光线会与大量空白格子计算求交,做了很多无用功。我们希望能在有物体的区域才做空间划分。
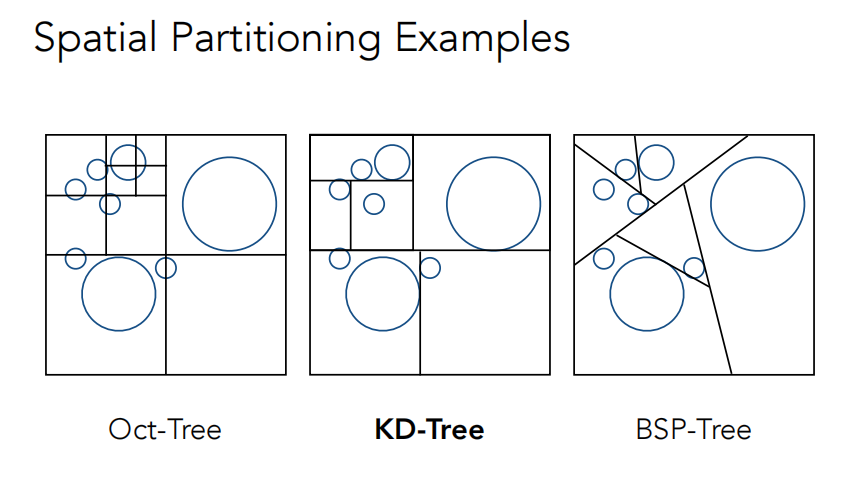
基于先不要一次性划分,而是先判断空间中是否有物体,再逐步划分的思想,人们提出3种“更划算”的空间划分方式,对于的数据结构都是树:
Oct-Tree:每次分4份(三维是8份,N维是2的N次方),用四叉树(三维是八叉树,N维是2的N次方叉数)表示;
KD-Tree:每次切一刀只分2份,下次再分2份,不断地分2份,每次沿着不同的轴分,如在三维空间中,先沿X轴分2份,再沿Y轴分2份,再沿Z轴分2份,再回到X轴分2份;
BSP-Tree:跟KD-Tree一样的分法,只是不平行与坐标轴分。
由KD-Tree相对容易计算,应用最广泛。
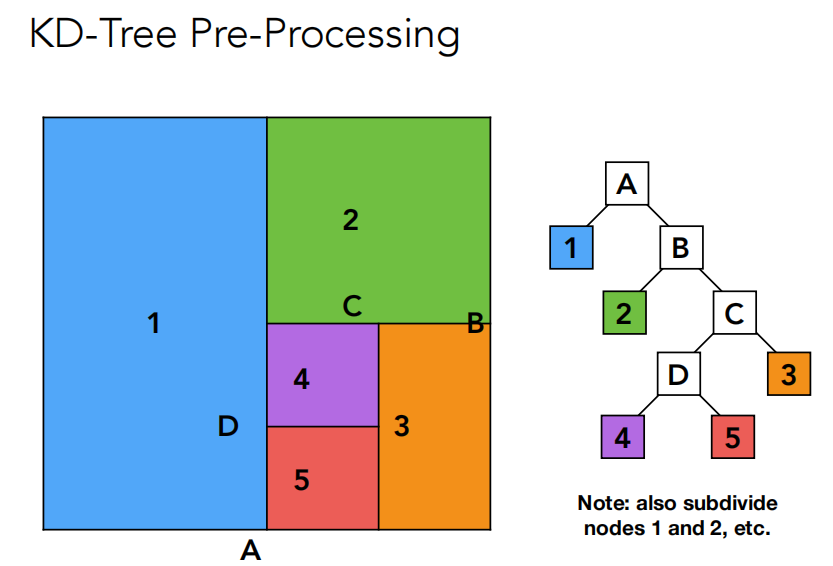
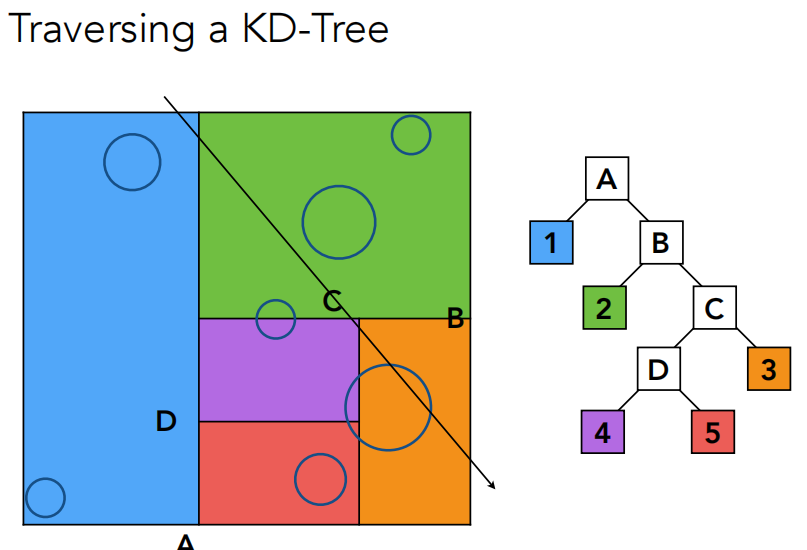
上图是KD-Tree的构建和光线求交判断。
基于空间的空间划分短板:
从上面KD-Tree的空间划分,我们会发现2个现象:
1.一个物体可能被多个空间“包含”,造成多次计算;
2.要判断一个物体是否在一个空间中不好计算,以三角形为例,我们可以认为三角形只要有1个顶点在空间中即判断为包含,但所有顶点都不在空间总并不能判断为不包含(有1个很小的格子在三角形内部)。
于是,我们要想一个方法规避上面的问题,即同一物体只会被一个空间包含,和比较容易判断物体是否在空间内。
基于物体的空间划分 Bounding Volume Hierarchy (BVH)
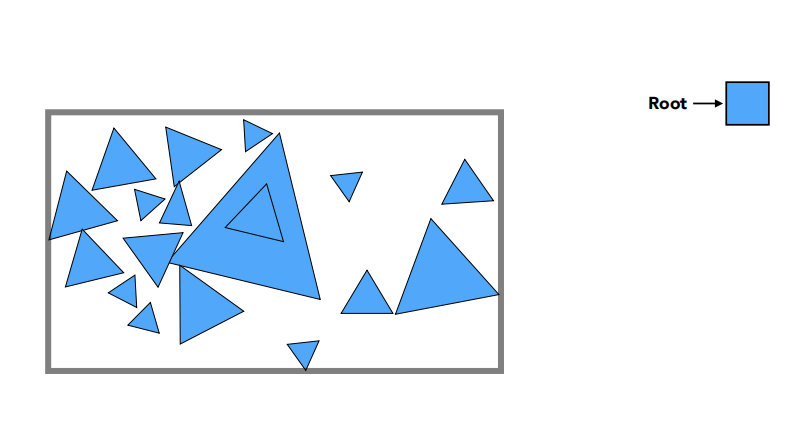
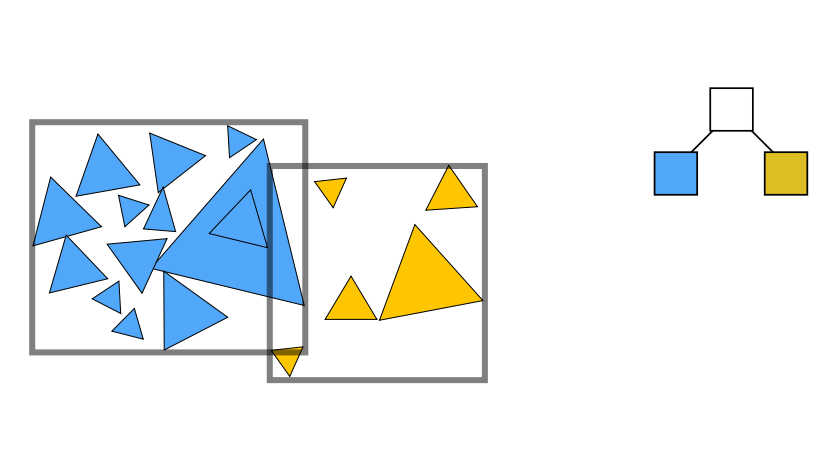
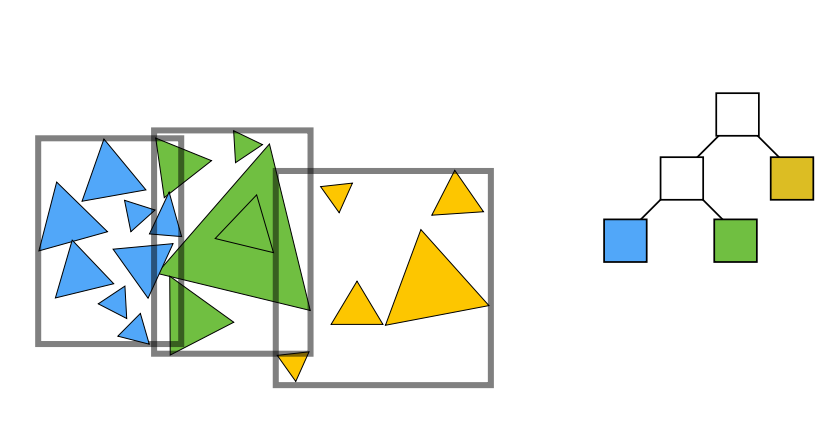
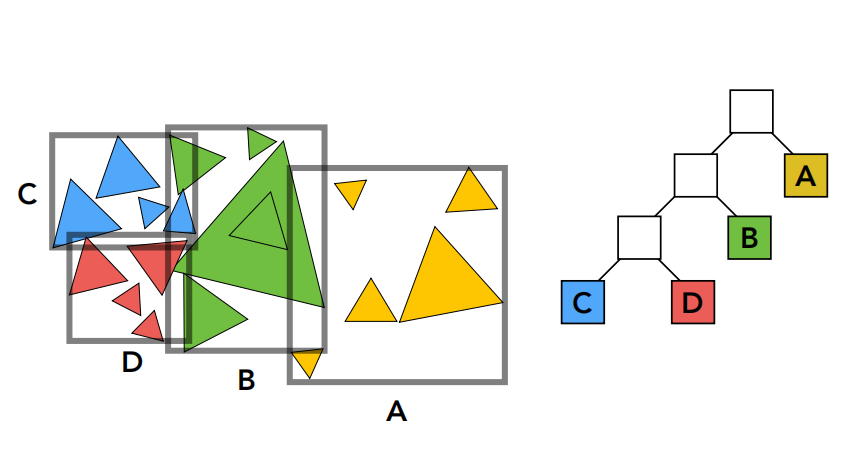
如图所示,我们把空间中的所有物体看做一个大家族,通过不断分家拆分成不同的空间,这样每个物体都在不同的空间中,在数据结构中则在不同的叶子节点中。
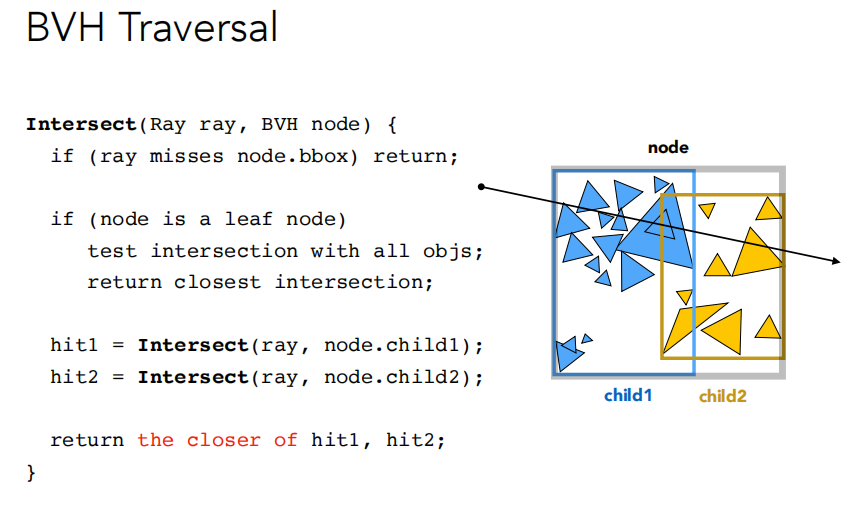
上图是这种“分家”算法的伪代码。
这种空间划分算法的关键是如何找到拆分后的包围盒,因为如果包围盒太大,包含的物体数量过多,则查找效率上等于没有划分,还多出了几个相互重叠的空间。
空间划分在非图形学中的应用
其实空间划分不是图形学的专用技术,它是一种思想,在游戏的AOI上同样应用广泛。例如在魔兽世界的大地图上,可能同时10000人,10000人都在做不同的动作,不能同时把这10000人的信息同步给其余9999人,这就需要把一个大地图划分成不同的区域,并且动态的调整每个区域包含的玩家。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号