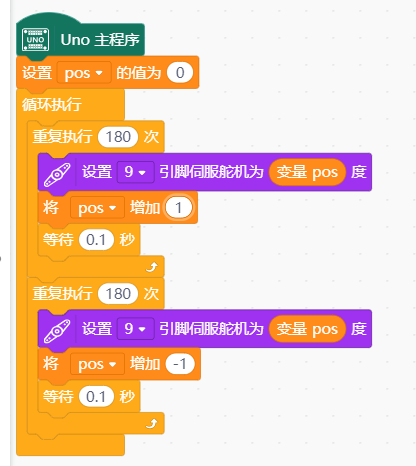
初连舵机
/*!
* MindPlus
* uno
*
*/
#include <DFRobot_Servo.h>
// 动态变量
volatile float mind_n_pos;
// 创建对象
Servo servo_9;
// 主程序开始
void setup() {
servo_9.attach(9);
mind_n_pos = 0;
}
void loop() {
for (int index = 0; index < 180; index++) {
servo_9.angle(abs(mind_n_pos));
mind_n_pos += 1;
delay(100);
}
for (int index = 0; index < 180; index++) {
servo_9.angle(abs(mind_n_pos));
mind_n_pos -= 1;
delay(100);
}
}