DeepLanes: End-To-End Lane Position Estimation using Deep Neural Networks
论文介绍
DeepLanes: End-To-End Lane Position Estimation using Deep Neural Networks
“DeepLanes:使用深度神经网络的端到端车道位置估计”——2016年
关键字:
深度神经网络+基于相机方法+车道检测
行文结构梳理
1、Introduction
2、Related Work
3、Backgroud
4、Lane Position Estimation
4.1 Camera Setup&Pre-processing
相机设置:
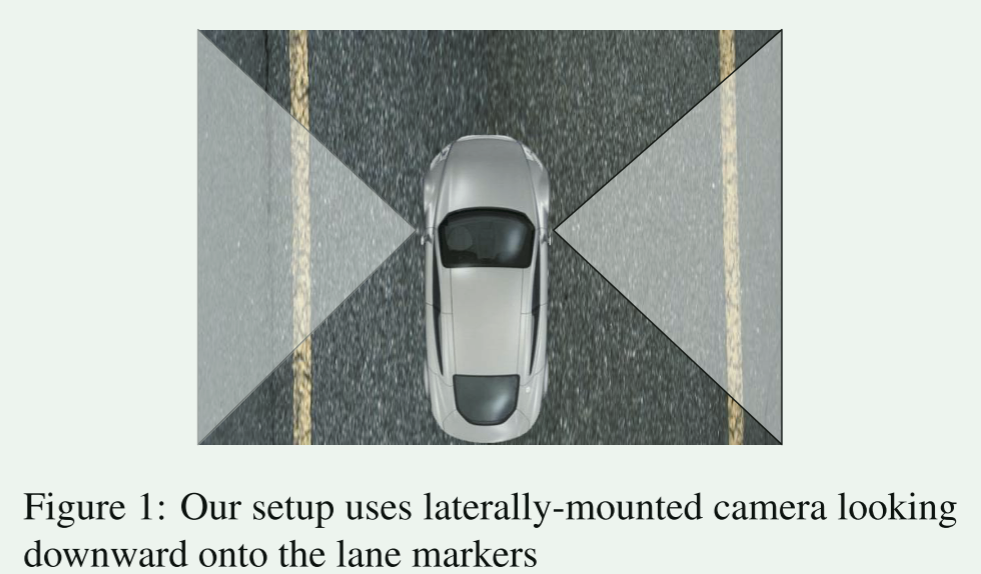
设置两个横向向下的摄像机避免干扰的影响
预处理:校正由广角透镜引起的径向失真。
4.2 Problem Definition
把预测车道线位置表示成分类问题。
具体:
输入图像\(X_{i}\),经过DNN,输出\(Y_{i}=({y_{0},....,y_{316}})\),\(y_{k}是输入图像第k行包含车道的概率\)
\(t_{i}表示第i个图像的真实值\)
\(e_{i}=argmax_{0\leq j \leq 316}y_{j} :表示第i个图像的车道线位置\)
4.3 Network architecture
输入:240×360的RGB图像
两个卷积层,每个卷积层附带一个normalization+pooling层
三个全连接层之间嵌入两个dropout层

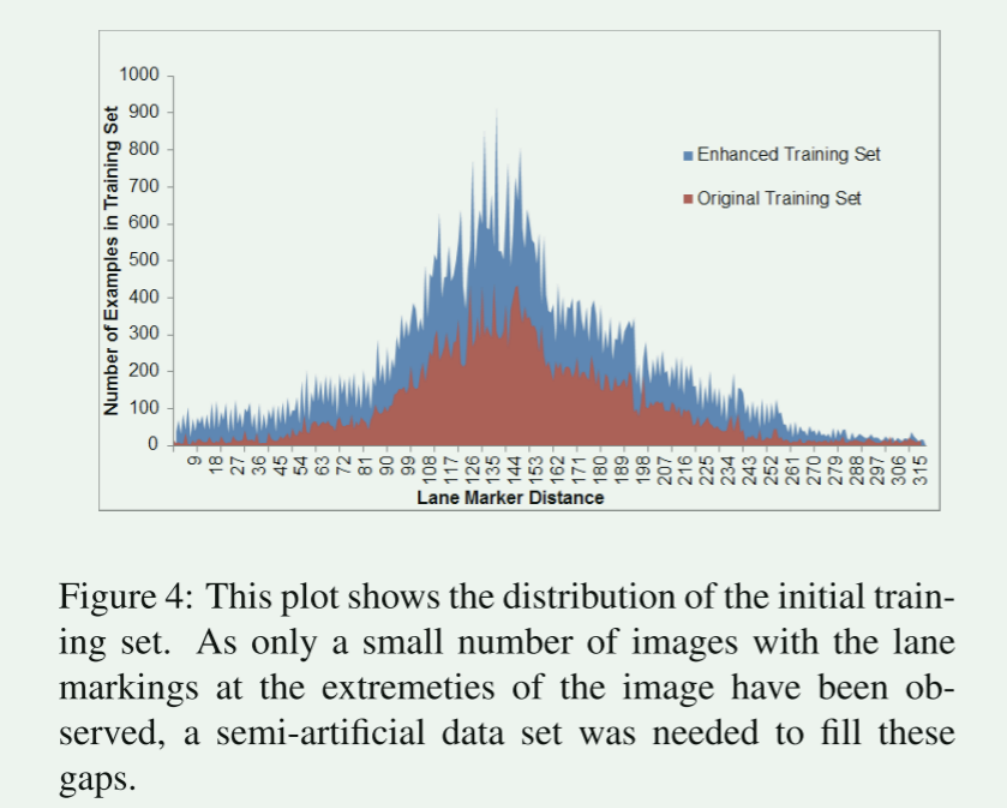
4.4 Artificial Data Generation
80000张带有标记的真实世界图像+40000张半人工图像
真实世界图像的直方图分布偏向中间:车辆在中间行驶的习惯影响。
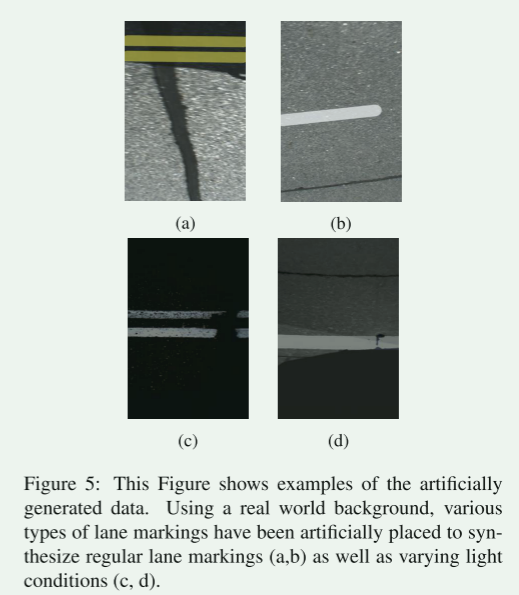
数据生成机制:
1、在不包含车道线的图像中,通过均匀分布来随机选择两个数字m,n。这两个数字分别代表合成的车道线标记在图像左右边界的位置,也就是说,这些随机选择的数字m和n被用来确定车道标线在图像左右两侧的位置。
2、连接的线条的像素值与背景像素的平均值进行混合,以模仿道路的纹理
3、了捕捉各种可能的情况,改变车道标线的颜色和宽度来创建各种不同的情景。
4、改变光照条件和阴影。
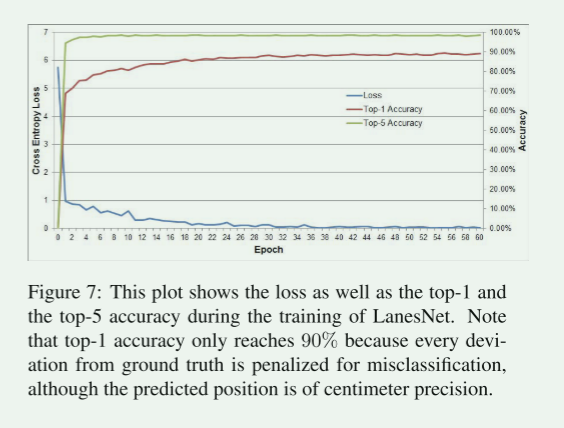
4.5 Experimental Evaluation
初始学习率0.5,之后逐轮降低为上一轮的0.8
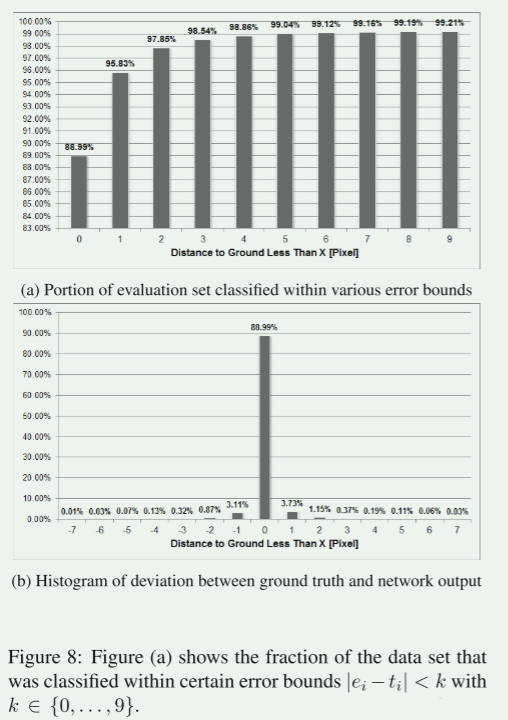
提出了一种评估策略:

准确率结果:
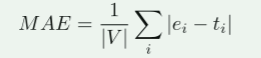
通过直方图测评:
通过MAE测评网络性能:
1、考虑无标记情况
2、不考虑无标记情况

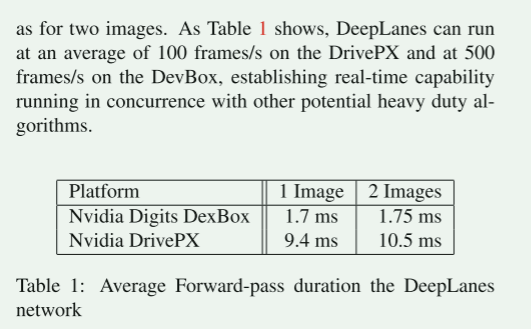
4.6 Execution Time
5、Estimating Lane Orientation
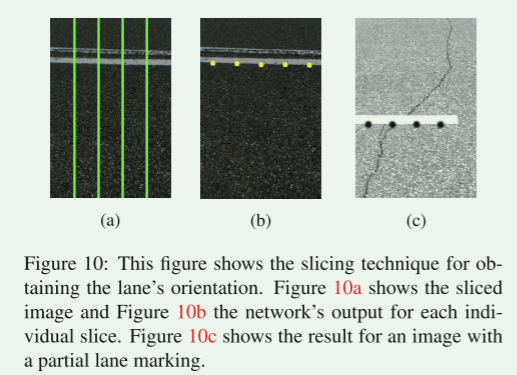
如果图像中感兴趣的区域足够小,车道标记可以近似为一条直线。如图10所示,我们将输入图像分成了五个切片,并将其调整大小以满足网络的输入大小。分别为每个切片估算车道标记的位置,可以得到一组点,用于计算车道的方向。图10a和10b显示了在各个切片上得到的点。这种方法可以通过减少或增加切片的数量来调整至任意精度。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号