论文:Ultra Fast Deep Lane Detection with Hybrid Anchor Driven Ordinal Classification-基于anchor方法
论文名:
Ultra Fast Deep Lane Detection with Hybrid Anchor Driven Ordinal Classification
混合Anchor驱动顺序分类的超快深车道检测
研究问题:
1、效率问题:在受限的车辆计算设备下,执行车道检测算法,需要更快的检测速度。此前的方法主要是基于分割,是自底向上的流水线策略很难实现快速。
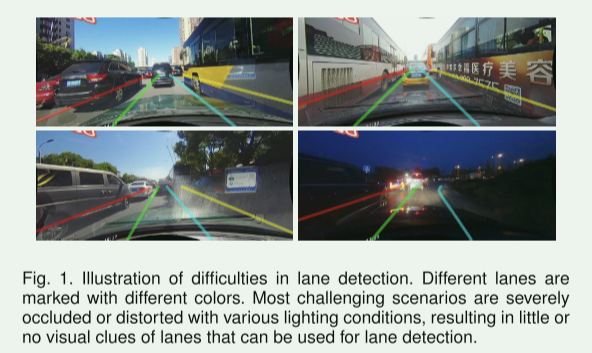
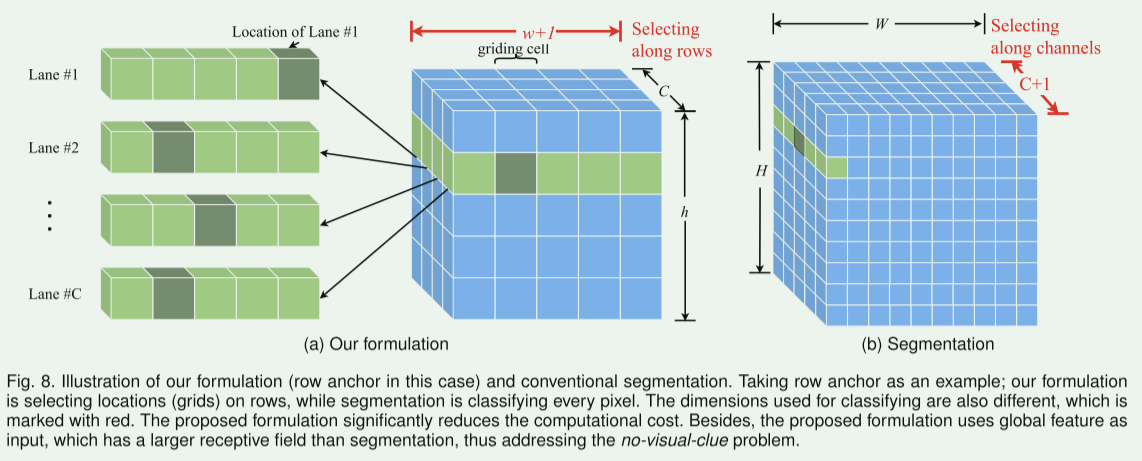
2、无视觉线索问题:在严重阻塞和极度照明条件下,无视觉信息是个大问题。车道线偏向扩大感受野来利用更多的信息。
提出:"can we find a fast and global formulation having large receptive field for the lane detection task"
研究内容:
1、混合锚系统
2、顺序分类
3、损失函数
实验内容:
主要结论:
混合锚系统+顺序分类流水线能实现显著的速度和准确性。
该算法将车道检测视为,基于全局特征的自顶向下分类的混合锚系统上稀疏坐标的直接学习,有效解决效率和无视觉线索问题。
缺点是:设置多少锚以及在何处放置锚仍然是固定的和手工制作的。自动的、动态的、可旋转的和非均匀的锚点将是更强大甚至更快的方法的潜在方向
模型:
ResNet
理解:
1、无视觉线索问题
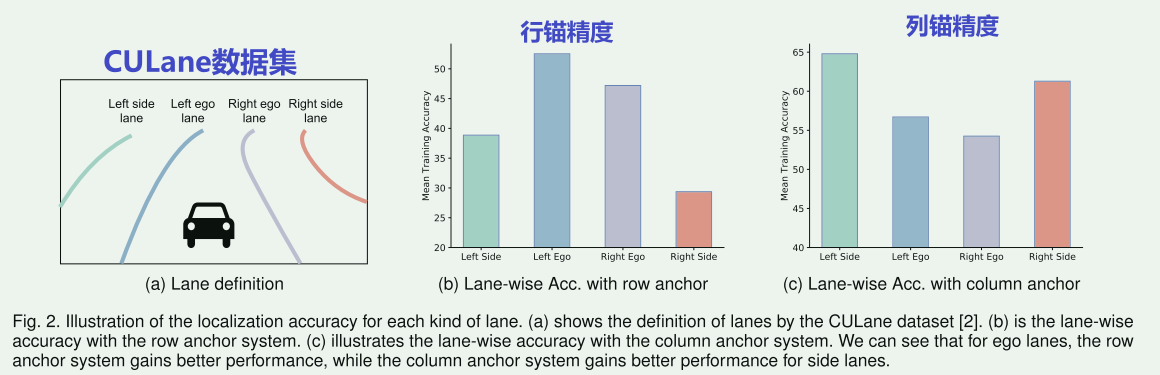
2、每种车道的定位精度图示
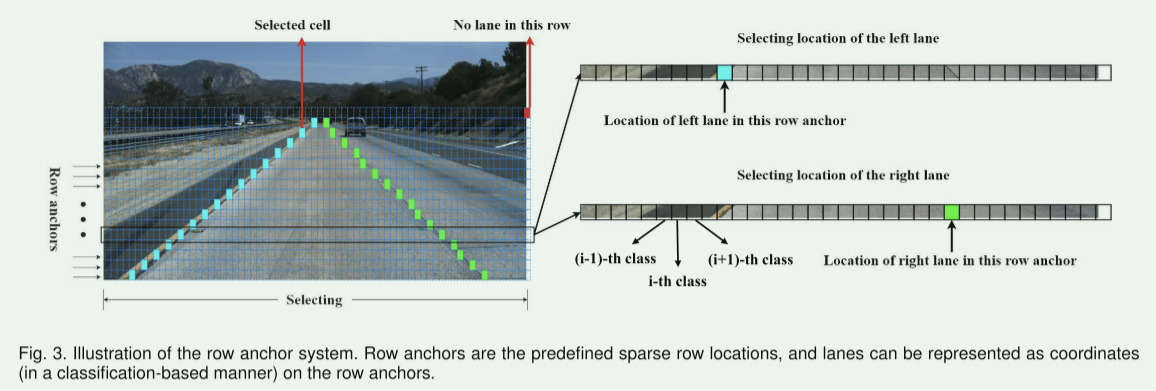
3、行锚系统的图示
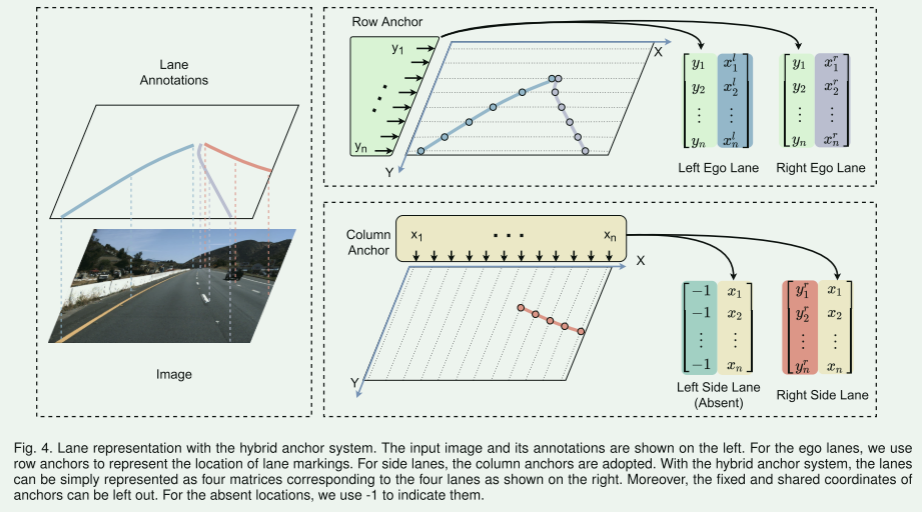
4、混合锚下的车道表示
5、放大定位误差问题
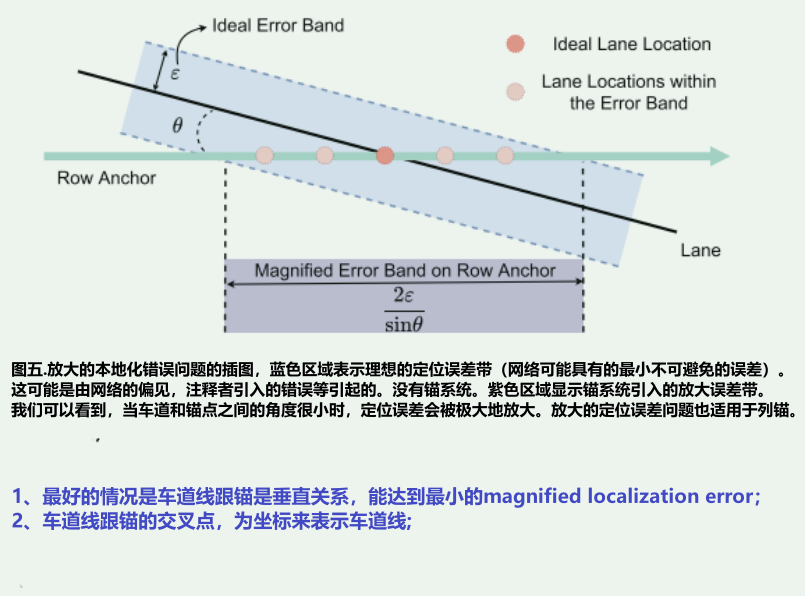
1、理想定位误差是不可避免的,原因可能是网络模型偏见、注释者标注引入的错误
2、当锚跟车道线呈现非垂直关系,其定位误差会被放大,即\(\frac{2\epsilon}{sin\theta}\)
特别,当成平行关系时,最难定位。
3、所以,以四条车道线来说,从行锚视角,ego lane定位效果好;从列锚角度,side lane定位效果好;从而引入hybrid anchor,即从行锚取ego lane,列锚取side lane.
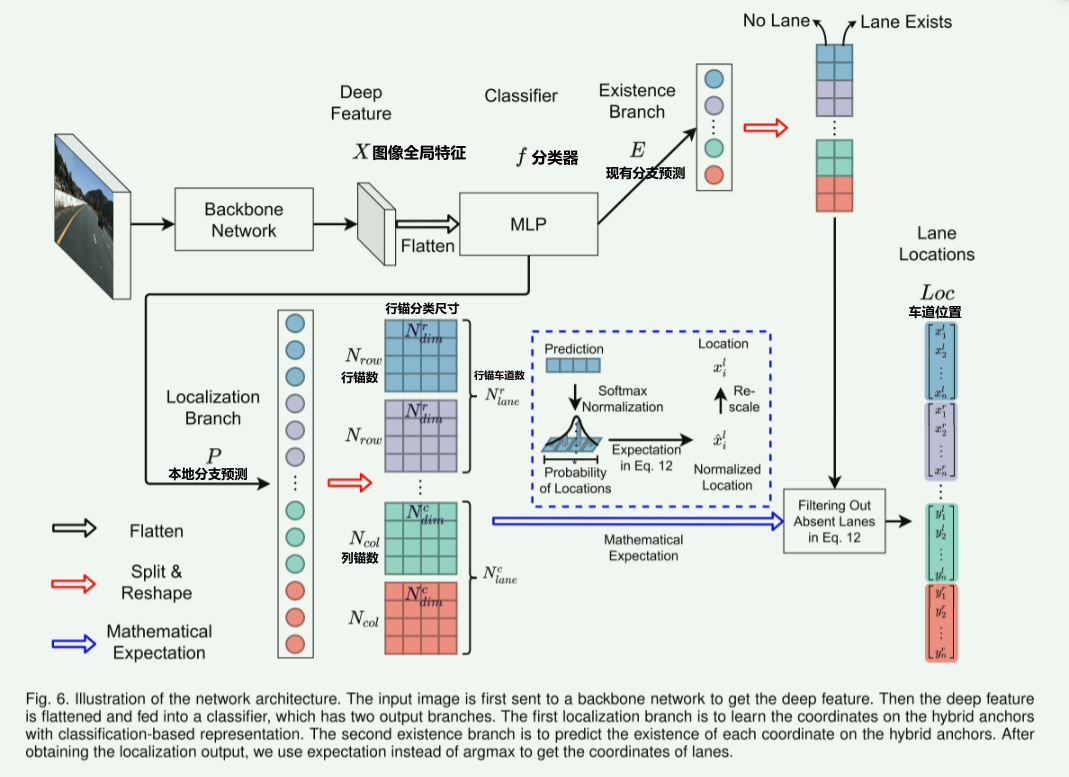
6、网络体系结构图示
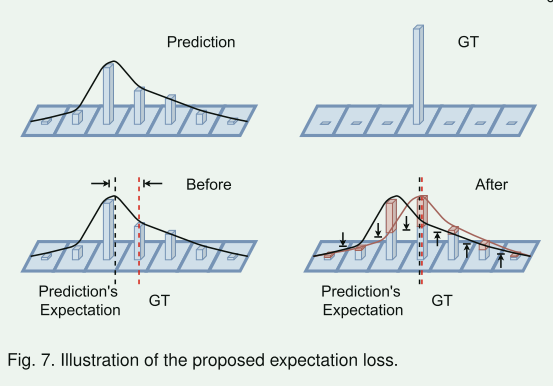
7、期望损失图示
8、行锚和传统分割图示
行文结构梳理:
Abstrct:现有方法主要集中在(像素分割)+缺陷(复杂场景)+(通过观察)提出一种高效方法(针对缺陷)+方法过程(anchor驱动思想)+ 表现性能好
1.Introduction:现有问题(效率问题+无视觉线索问题)+引出问题(find a.. for the lane detection task)+ 提出方法(row-anchor-driven representation+基于分类学习锚坐标)+row/column-anchor的问题(放大的定位错误问题)+改进至(混合锚,同时优化ego,side lane)+学习坐标回归不太行(用顺序分类方法)+两个loss函数实现顺序分类+总结成三点
2.Related Word:
2.1.Lane Detection with Bottom-up Modeling:介绍了许多自底向上的建模方法
2.2.Lane Detection with Top-down Modeling:介绍了许多自顶向下的方法,
3.Ultra fast lane detection
3.1.Lane Representation with Anchors:将车道线用一系列坐标表示,其坐标为车道线跟锚的交叉点
3.2.Anchor-driven Network Design:通过分类去学习行锚、列锚上的目标;方法是分成P和E分支,P分支是多分类策略,E分支是二分类策略
3.3.Ordinal Classification Losses:在分类上,引入连续关系,成为连续分类问题,和后面的期望损失相对应;采取交叉熵损失和期望损失(P和E分支各一个),最总损失函数,是各损失函数的权重和。\(L=L_{cls}+\alpha L_{exp}+\beta L_{ext}\)
3.4.Network Inference:定位车道线的阐述,E分支过滤缺失车道线,P经过softmax函数映射成一个向量,对通过预测分布的数学期望对向量处理得到位置。
3.5.Analysis and Discussion:
4.Experiment
4.1.Experimental Setting:采用的数据集,评估标准,细节,数据增强等
4.2.Ablation Study
4.3.Results:具有更快的速度
5.Conclusion

 浙公网安备 33010602011771号
浙公网安备 33010602011771号