YOLO end-to-end
1.YOLO: You Only Look Once:Unified, Real-Time Object Detection
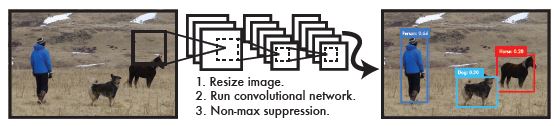
YOLO是一个可以一次性预测多个Box位置和类别的卷积神经网络,能够实现端到端的目标检测和识别,其最大的优势就是速度快。事实上,目标检测的本质就是回归,因此一个实现回归功能的CNN并不需要复杂的设计过程。YOLO没有选择滑窗或提取proposal的方式训练网络,而是直接选用整图训练模型。这样做的好处在于可以更好的区分目标和背景区域,相比之下,采用proposal训练方式的Fast-R-CNN常常把背景区域误检为特定目标。当然,YOLO在提升检测速度的同时牺牲了一些精度。下图所示是YOLO检测系统流程:1.将图像Resize到448*448;2.运行CNN;3.非极大抑制优化检测结果。有兴趣的童鞋可以按照http://pjreddie.com/darknet/install/的说明安装测试一下YOLO的scoring流程,非常容易上手。接下来将重点介绍YOLO的原理。
1.1 一体化检测方案
YOLO的设计理念遵循端到端训练和实时检测。YOLO将输入图像划分为S*S个网络,如果一个物体的中心落在某网格(cell)内,则相应网格负责检测该物体。在训练和测试时,每个网络预测B个bounding boxes,每个bounding box对应5个预测参数,即bounding box的中心点坐标(x,y),宽高(w,h),和置信度评分。这里的置信度评分(Pr(Object)*IOU(pred|truth))综合反映基于当前模型bounding box内存在目标的可能性Pr(Object)和bounding box预测目标位置的准确性IOU(pred|truth)。如果bouding box内不存在物体,则Pr(Object)=0。如果存在物体,则根据预测的bounding box和真实的bounding box计算IOU,同时会预测存在物体的情况下该物体属于某一类的后验概率Pr(Class_i|Object)。假定一共有C类物体,那么每一个网格只预测一次C类物体的条件类概率Pr(Class_i|Object), i=1,2,...,C;每一个网格预测B个bounding box的位置。即这B个bounding box共享一套条件类概率Pr(Class_i|Object), i=1,2,...,C。基于计算得到的Pr(Class_i|Object),在测试时可以计算某个bounding box类相关置信度:Pr(Class_i|Object)*Pr(Object)*IOU(pred|truth)=Pr(Class_i)*IOU(pred|truth)。如果将输入图像划分为7*7网格(S=7),每个网格预测2个bounding box (B=2),有20类待检测的目标(C=20),则相当于最终预测一个长度为S*S*(B*5+C)=7*7*30的向量,从而完成检测+识别任务,整个流程可以通过下图理解。

1.1.1 网络设计
YOLO网络设计遵循了GoogleNet的思想,但与之有所区别。YOLO使用了24个级联的卷积(conv)层和2个全连接(fc)层,其中conv层包括3*3和1*1两种Kernel,最后一个fc层即YOLO网络的输出,长度为S*S*(B*5+C)=7*7*30.此外,作者还设计了一个简化版的YOLO-small网络,包括9个级联的conv层和2个fc层,由于conv层的数量少了很多,因此YOLO-small速度比YOLO快很多。如下图所示我们给出了YOLO网络的架构。

1.1.2 训练
作者训练YOLO网络是分步骤进行的:首先,作者从上图网络中取出前20个conv层,然后自己添加了一个average pooling层和一个fc层,用1000类的ImageNet数据与训练。在ImageNet2012上用224*224d的图像训练后得到的top5准确率是88%。然后,作者在20个预训练好的conv层后添加了4个新的conv层和2个fc层,并采用随即参数初始化这些新添加的层,在fine-tune新层时,作者选用448*448图像训练。最后一个fc层可以预测物体属于不同类的概率和bounding box中心点坐标x,y和宽高w,h。Boundingbox的宽高是相对于图像宽高归一化后得到的,Bounding box的中心位置坐标是相对于某一个网格的位置坐标进行过归一化,因此x,y,w,h均介于0到1之间。
在设计Loss函数时,有两个主要的问题:1.对于最后一层长度为7*7*30长度预测结果,计算预测loss通常会选用平方和误差。然而这种Loss函数的位置误差和分类误差是1:1的关系。2.整个图有7*7个网格,大多数网格实际不包含物体(当物体的中心位于网格内才算包含物体),如果只计算Pr(Class_i),很多网格的分类概率为0,网格loss呈现出稀疏矩阵的特性,使得Loss收敛效果变差,模型不稳定。为了解决上述问题,作者采用了一系列方案:
1.增加bounding box坐标预测的loss权重,降低bounding box分类的loss权重。坐标预测和分类预测的权重分别是λcoord=5,λnoobj=0.5.
2.平方和误差对于大和小的bounding box的权重是相同的,作者为了降低不同大小bounding box宽高预测的方差,采用了平方根形式计算宽高预测loss,即sqrt(w)和sqrt(h)。
训练Loss组成形式较为复杂,这里不作列举,如有兴趣可以参考作者原文慢慢理解体会。
1.1.3 测试
作者选用PASAL VOC图像测试训练得到的YOLO网络,每幅图会预测得到98个(7*7*2)个bouding box及相应的类概率。通常一个cell可以直接预测出一个物体对应的bounding box,但是对于某些尺寸较大或靠近图像边界的物体,需要多个网格预测的结果通过非极大抑制处理生成。虽然YOLO对于非极大抑制的依赖不及R-CNN和DPM,但非极大抑制确实可以将mAP提高2到3个点。
1.2 方法对比
作者将YOLO目标检测与识别方法与其他几种经典方案进行比较可知:
DPM(Deformable parts models): DPM是一种基于滑窗方式的目标检测方法,基本流程包括几个独立的环节:特征提取,区域划分,基于高分值区域预测bounding box。YOLO采用端到端的训练方式,将特征提取、候选框预测,非极大抑制及目标识别连接在一起,实现了更快更准的检测模型。
R-CNN:R-CNN方案分需要先用SeletiveSearch方法提取proposal,然后用CNN进行特征提取,最后用SVM训练分类器。如此方案,诚繁琐也!YOLO精髓思想与其类似,但是通过共享卷积特征的方式提取proposal和目标识别。另外,YOLO用网格对proposal进行空间约束,避免在一些区域重复提取Proposal,相较于SeletiveSearch提取2000个proposal进行R-CNN训练,YOLO只需要提取98个proposal,这样训练和测试速度怎能不快?
Fast-R-CNN、Faster-R-CNN、Fast-DPM: Fast-R-CNN和Faster-R-CNN分别替换了SVMs训练和SelectiveSeach提取proposal的方式,在一定程度上加速了训练和测试速度,但其速度依然无法和YOLO相比。同理,将DPM优化在GPU上实现也无出YOLO之右。
1.3 实验
1.3.1 实时检测识别系统对比

1.3.2 VOC2007准确率比较
1.3.3 Fast-R-CNN和YOLO错误分析

如图所示,不同区域分别表示不同的指标:
Correct:正确检测和识别的比例,即分类正确且IOU>0.5
Localization:分类正确,但0.1<IOU<0.5
Similar:类别相似,IOU>0.1
Other:分类错误,IOU>0.1
Background: 对于任何目标IOU<0.1
可以看出,YOLO在定位目标位置时准确度不及Fast-R-CNN。YOLO的error中,目标定位错误占据的比例最大,比Fast-R-CNN高出了10个点。但是,YOLO在定位识别背景时准确率更高,可以看出Fast-R-CNN假阳性很高(Background=13.6%,即认为某个框是目标,但是实际里面不含任何物体)。
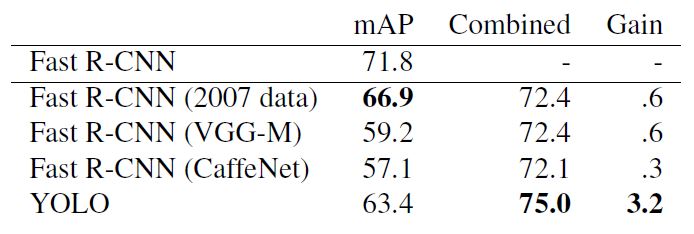
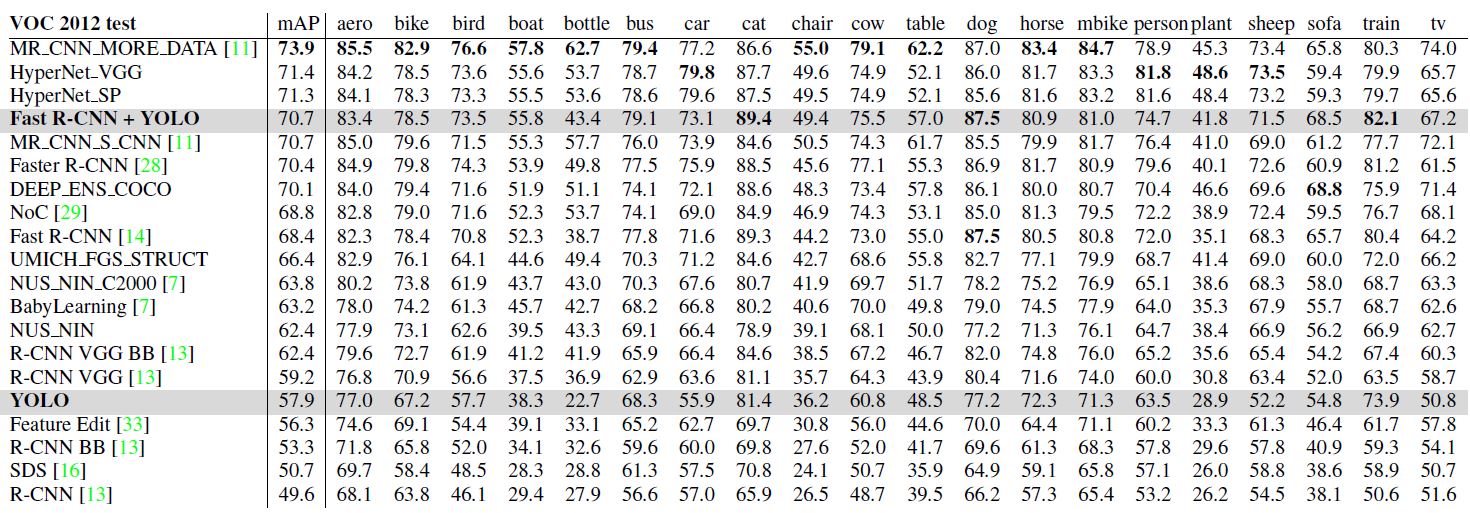
1.3.4 VOC2012准确率比较
由于YOLO在目标检测和识别是处理背景部分优势更明显,因此作者设计了Fast-R-CNN+YOLO检测识别模式,即先用R-CNN提取得到一组bounding box,然后用YOLO处理图像也得到一组bounding box。对比这两组bounding box是否基本一致,如果一致就用YOLO计算得到的概率对目标分类,最终的bouding box的区域选取二者的相交区域。Fast-R-CNN的最高准确率可以达到71.8%,采用Fast-R-CNN+YOLO可以将准确率提升至75.0%。这种准确率的提升是基于YOLO在测试端出错的情况不同于Fast-R-CNN。虽然Fast-R-CNN_YOLO提升了准确率,但是相应的检测识别速度大大降低,因此导致其无法实时检测。
使用VOC2012测试不同算法的mean Average Precision,YOLO的mAP=57.9%,该数值与基于VGG16的RCNN检测算法准确率相当。对于不同大小图像的测试效果进行研究,作者发现:YOLO在检测小目标时准确率比R-CNN低大约8~10%,在检测大目标是准确率高于R-CNN。采用Fast-R-CNN+YOLO的方式准确率最高,比Fast-R-CNN的准确率高了2.3%。
1.4 总结
YOLO是一种支持端到端训练和测试的卷积神经网络,在保证一定准确率的前提下能图像中多目标的检测与识别。
[1] Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection. In CVPR 2016
[2] Najibi M, Rastegari M, Davis L S. G-CNN: an Iterative Grid Based Object Detector. In CVPR 2016
[3] Gidaris S, Komodakis N. LocNet: Improving Localization Accuracy for Object Detection. In CVPR 2016
posted on 2016-12-19 18:42 alexanderkun 阅读(1763) 评论(0) 收藏 举报


 浙公网安备 33010602011771号
浙公网安备 33010602011771号