DP 优化方法大杂烩 I.
前方标 * 的是推荐阅读的部分或推荐做的题目。
由于文章内容过多,为分摊压力,更多内容详见 DP 优化方法大杂烩 II.。
CHANGE LOG
- 2021.12.21:计划重构整篇文章。当前重构至矩阵快速幂。
- 2021.12.22:重构至 wqs 二分。
- 2021.12.23:施工完毕。
- 2022.1.25:第二遍重构文章,修改表述。
- 2022.2.11:施工完毕。
0. 前言
动态规划是 OI 界的一个博大分支,因而衍生出了很多优化方法。最基本的是对 状态设计 的优化。如果状态从三维降到了两维,甚至一维,将对时间复杂度和常数产生巨大影响。
可惜的是,对状态设计的优化并没有一般性方法,全凭做题经验与观察性质的能力。文章涉及到的方法大都是对 如何转移 的优化,如根据决策单调性尝试分治。
一般用 \(t\)D / \(e\)D 描述动态规划 规模 的类型,其中 \(t\) 表示问题大小,\(e\) 表示转移时依赖子问题的大小。即状态数 \(n ^ t\),每个状态依赖于 \(n ^ e\) 个前驱状态的信息。除非问题有特殊性质,解决 \(t\)D / \(e\)D 动态规划需要 \(\mathcal{O}(n ^ {t + e})\) 的时间复杂度。
- \(1\)D / \(1\)D:最长上升子序列。
- 2D / 0D:最长公共子序列,普通背包问题。
- 2D / 1D:多源最短路 Floyd。
1. 动态 DP
动态 DP 简称 DDP(Dynamic Dynamic Programming),其本质是用 矩阵 维护带修改的动态规划问题。
1.1 矩阵描述转移
部分动态规划转移方程涉及到的状态较少,且一个状态由其前驱的 线性组合 得到。其实并不一定需是线性组合,只需满足 结合律,见下方说明。此时可以用 矩阵乘法 描述转移方程。
斐波那契数列 \(f_i = f_{i - 1} + f_{i - 2}\) 即一例。求解 \(f_i\) 只需知道 \(f_{i - 1}\) 和 \(f_{i - 2}\),故记录 \(F_{i, 0}\) 表示 \(f_i\),\(F_{i, 1}\) 表示 \(f_{i - 1}\),转移方程即
注意到 \(F_i\) 是 \(F_{i - 1}\) 的 线性组合,因此
这就是矩阵描述转移。
当转移系数如点权或边权带修时,重新 DP 的复杂度不可接受,考虑用数据结构如线段树维护 区间转移矩阵乘积 可支持单点修改。此方法还可快速计算一段区间或一棵子树的 DP 值,非常优美。DDP 也有局限性,它对转移方程要求较高。
说明:可以用矩阵描述的转移方程不一定必须是前驱的线性组合。广义 矩阵乘法
只需满足 \(\bigotimes\) 具有 结合律,且 \(\bigotimes\) 对 \(\bigoplus\) 有 分配律,则存在结合律。设三个 \(n\) 阶方阵 \(A, B, C\) 相乘,有
常见广义矩阵乘法如 \(\min, +\) 卷积,$\max, + $ 卷积,因为 \(a + \min(b, c) = \min(a + b, a + c)\),即加法对 \(\min\) 有分配律。图论的邻接矩阵在 \(\mathrm{or}, \mathrm{and}\) 卷积下的 \(k\) 次方描述了每个点出发恰好走 \(k\) 步到达的节点。
1.2 算法介绍:树链剖分写法
接下来,我们以 P4719 为例,深入剖析一下动态 DP 的一般树剖写法与诸多细节。
若没有修改操作,本题是经典的 树上最大独立集 问题,详见没有上司的舞会。设 \(f_{i,0/1}\) 分别表示 不选 或 选 点 \(i\) 的最大权值,有
加上修改操作,一般想法是用矩阵表示转移方程,再用数据结构维护。注意到一个节点可能有非常多的儿子,因此三方级别的矩阵乘法就凉了。
我们利用 矩乘与 ds 能够 快速转移方程 的特点,与 树链剖分 从根到任意节点的轻边个数级别为 \(\mathcal{O}(\log)\) 的优秀性质,设计新的状态与转移方程。它应满足从一个点的 重儿子 转移到该点的方程可用矩阵描述。
首先,对树 \(T\) 进行树链剖分,记 \(s_i\) 为 \(i\) 的重儿子。设 \(g_{i, 0 / 1}\) 分别表示 不选 或 选 点 \(i\) 且 只能从轻儿子 转移的最大权值,有
定义 广义 矩阵乘法 \(A \times B \to C\) 表示 \(C_{i, j} = \max\limits_{k = 1} ^ n A_{i, k} + B_{k, j}\)。由于 \(\max\) 对 \(+\) 具有分配律:\(\max (a_i + b_j) = \max a_i + \max b_j\),而 \(+\) 本身具有结合律,因此这样的矩阵乘法具有结合律,是优秀的。这样,我们有
\(f,g\) 需要 预处理(其实 \(f\) 不需要,但是预处理 \(g\) 依赖于 \(f\))。记点 \(i\) 从其重儿子转移上来的矩阵为 \(G_i\),考虑支持修改操作:
我们注意到,一次修改仅改变 \(\mathcal{O}(\log)\) 级别个节点的 \(G\)。这是因为仅在 轻儿子被修改时 需要更新 \(G\),而 \(i\to R\) 的路径上只有 \(\mathcal{O}(\log)\) 条轻边。这样,我们不断跳重链,并实时维护每条 重链顶端节点 \(t\) 的父节点 \(fa_t\) 的 \(G_{fa_t}\)。
思考到这一步,我们遇到了所有 DDP 都需特别注意的关键问题:如何在修改点 \(i\) 轻儿子的 \(f\) 后维护该点的 \(G_i\)。注意到每个轻儿子对于父亲的 \(G\) 的贡献以所有轻儿子的 \(f\) 的和的形式计算,它满足 可减性,因此只需在修改前先计算原来的 \(f\),将其贡献从 \(g_{tp_i}\) 中减掉,再加上更新后的贡献即可。
如何求 \(f\):注意到重链末端是叶子节点,而叶子节点没有 \(s_i\),所以 \(f_i = g_i\ (i\in \mathrm{leaf}(T))\)。因此一个点的 \(f\) 等于 它所在重链末端到它的矩阵积。记录 \(ed_i\) 表示 \(i\) 所在重链末端叶子节点,\(D_i\) 表示 \(i\) 的 dfn,\(f_x\) 可由 \(\prod\limits_{i = D_x}^{D_{ed_x}}G_i\)。
上述过程要求我们在更新 \(G_i\) 时先 不要 在线段树上修改,因为我们还需 原来的 \(G_i\) 求出 \(f_{top_i}\),以从 \(G_{fa_{top_i}}\) 扣掉其贡献。这一要求体现在代码中即,设当前节点为 \(x\),则将 \(g_{fa_{top_x}}\) 减掉 \(f_{top_x}\) 即从 \(x\) 所在重链末端 \(ed_x\) 一直到重链顶端 \(top_x\) 的 \(G\) 的乘积,在线段树上更新 \(G_x\),再算出新的 \(f_{top_x}\) 加到 \(g_{fa_{top_x}}\) 上。
综上,时间复杂度线性对数平方,乘以矩阵乘法的时间,常数非常大。
const int N = 1e5 + 5;
const int inf = 1e9;
struct Matrix {
int a, b, c, d;
Matrix operator * (Matrix x) { // 广义矩阵乘法
Matrix y;
y.a = max(a + x.a, b + x.c);
y.b = max(a + x.b, b + x.d);
y.c = max(c + x.a, d + x.c);
y.d = max(c + x.b, d + x.d);
return y;
}
} I, ans, G[N], val[N << 2];
int n, m, a[N], f[N][2], g[N][2];
int cnt, hd[N], nxt[N << 1], to[N << 1];
void add(int u, int v) {nxt[++cnt] = hd[u], hd[u] = cnt, to[cnt] = v;}
int dn, sz[N], fa[N], dep[N], son[N], dfn[N], rev[N], top[N], ed[N];
void GenMat(int x) {G[x].a = G[x].c = g[x][0], G[x].b = g[x][1], G[x].d = -inf;}
void dfs1(int id) {
f[id][1] = a[id], sz[id] = 1, dep[id] = dep[fa[id]] + 1;
for(int i = hd[id]; i; i = nxt[i]) {
int it = to[i];
if(it == fa[id]) continue;
fa[it] = id, dfs1(it), sz[id] += sz[it];
f[id][1] += f[it][0], f[id][0] += max(f[it][0], f[it][1]); // 先处理出 f
if(sz[it] > sz[son[id]]) son[id] = it;
}
}
void dfs2(int id, int tp) {
g[id][1] = a[id], top[id] = tp, rev[dfn[id] = ++dn] = id;
if(son[id]) dfs2(son[id], tp), ed[id] = ed[son[id]];
else ed[id] = id;
for(int i = hd[id]; i; i = nxt[i]) {
int it = to[i];
if(it == fa[id] || it == son[id]) continue;
dfs2(it, it), g[id][1] += f[it][0], g[id][0] += max(f[it][0], f[it][1]); // 再处理出 g
}
}
struct SegTree {
void build(int l, int r, int x) {
if(l == r) return val[x] = G[rev[l]], void();
int m = l + r >> 1;
build(l, m, x << 1), build(m + 1, r, x << 1 | 1);
val[x] = val[x << 1 | 1] * val[x << 1];
}
void modify(int l, int r, int p, int x) {
if(l == r) return val[x] = G[rev[p]], void();
int m = l + r >> 1;
if(p <= m) modify(l, m, p, x << 1);
else modify(m + 1, r, p, x << 1 | 1);
val[x] = val[x << 1 | 1] * val[x << 1]; // 右乘左儿子
}
void query(int l, int r, int ql, int qr, int x) {
if(ql <= l && r <= qr) return ans = ans * val[x], void();
int m = l + r >> 1;
if(m < qr) query(m + 1, r, ql, qr, x << 1 | 1); // 先递归右子树
if(ql <= m) query(l, m, ql, qr, x << 1);
}
} tr;
int modify(int x, int val) {
g[x][1] += val - a[x], a[x] = val;
while(top[x] != 1) {
int tp = top[x], ft = fa[tp];
ans = I, tr.query(1, n, dfn[tp], dfn[ed[tp]], 1);
g[ft][1] -= ans.a, g[ft][0] -= max(ans.a, ans.b); // 先减掉 x 重链顶端父节点 ft 的 x 所在的轻儿子的 f 的贡献
GenMat(x), tr.modify(1, n, dfn[x], 1); // update
ans = I, tr.query(1, n, dfn[tp], dfn[ed[tp]], 1);
g[ft][1] += ans.a, g[ft][0] += max(ans.a, ans.b), x = ft; // 再加回去
} GenMat(x), tr.modify(1, n, dfn[x], 1);
ans = I, tr.query(1, n, 1, dfn[ed[1]], 1);
return max(ans.a, ans.b);
}
int main(){
cin >> n >> m;
for(int i = 1; i <= n; i++) a[i] = read();
for(int i = 1, u, v; i < n; i++) add(u = read(), v = read()), add(v, u);
dfs1(1), dfs2(1, 1);
for(int i = 1; i <= n; i++) GenMat(i); tr.build(1, n, 1);
for(int i = 1, x, y; i <= m; i++) x = read(), print(modify(x, read())), pc('\n');
return flush(), 0;
}
- 注意点 1:由于 dfn 大的节点深度大,且转移顺序 自下而上,所以线段树维护时应用 右区间乘左区间,查询时也要先向右区间递归。这与写法习惯有关。用行向量右乘矩阵和用列向量左乘矩阵,线段树
push_up时的区间顺序不同。总之,读者需要根据实际意义理解并实现。 - 注意点 2:就算初始全是单位矩阵 \(I\),也要 初始化,因为大部分情况下 \(I \neq \begin{bmatrix} 0 & 0 \\ 0 & 0 \end{bmatrix}\)。
- 技巧 1:当矩阵乘法仅有某些位置上的值为非常数时,仅维护这些位置的值可以有效减小常数,如切树游戏。
- 技巧 2:一般情况下信息满足可减性,即直接从 \(g_{fa_i}\) 中扣掉 \(f_i\) 的贡献。不满足可减性时可以使用线段树维护带修半群元素积,但似乎如果没有可减性,我们甚至无法用矩阵描述转移,笔者也没有见过这样的题目。
1.3 全局平衡二叉树实现
等学会了 LCT 再来填坑。
upd:可能永远也不会填了,因为永远也不打算学 LCT。
1.4 例题
I. P4719 【模板】"动态 DP" & 动态树分治
动态 DP 的模板题。
II. CF750E New Year and Old Subsequence
题意简述:多次询问一个字符串的子串 \([l,r]\),求至少删去多少字符后才能使得其不包含子序列 \(2016\) 而包含 \(2017\)。\(n,q\leq 2\times 10^5\)。
大力子序列自动机上 DP:设 \(f_{i, 0 / 1 / 2 / 3 / 4}\) 分别表示包含 \(\varnothing / 2 / 20 / 201 / 2017\) 且不包含 \(2016\) 在 \([1,i]\) 中最少需要删去多少个字符,有:
对于直接接在 \(f\) 后面而非 \(+\) 后方的 \([]\),如果艾佛森括号中的条件不成立不能转移。由于转移维度非常小,仅有 \(5\),故可将上式改写成 \(\min +\) 广义矩阵乘法形式。
每次询问用初始向量 \(\begin{bmatrix} 0 & \infty & \infty & \infty & \infty \end{bmatrix}\) 乘 \([l,r]\) 用线段树维护的区间矩阵积,得到的 \(f_{r, 4}\) 即为所求。若 \(f_{r, 4} = \infty\) 则无解。
不难看出实际上 \(\prod\limits_{i = l} ^ r G_i\) 的第一行就是 \(f_r\),其中 \(G_i\) 是 \(f_{i-1}\to f_i\) 的转移矩阵,所以直接求出矩阵区间矩阵积也可。不过用向量乘矩阵 \(f\times G\) 可以做到平方,而该方法 \(G\times G\) 必须三方,常数较大。时间复杂度 \(\mathcal{O}(k ^ 2(kn + q\log n))\),其中 \(k\) 是转移维度,本题中为 \(5\)。
*III. P3781 [SDOI2017]切树游戏
题意简述:给出 \(n\) 个节点的树,点有小于 \(m=2^7\) 的权值 \(v_i\),权值带修。多次询问有多少非空子连通块满足所有点权值异或和为 \(k\)。\(n,q\leq 3\times 10^4\)。
首先设计 DP,设 \(f_{i, x}\) 表示以 \(i\) 为根的子树异或和为 \(x\) 的方案数。合并 \(u\) 及其儿子 \(v\) 时,我们有转移方程
每个节点 \(u\) 的初始值为 \(f_{u, j} = [v_u = j]\)。转移方程是异或卷积,两边同时取 FWT,得到 \(F_u\gets F_u (F_v+1)\)。这样,\(\mathcal{O}(nm\log m)\) 预处理每个节点的初始 FWT 值,单次对整棵树进行一遍树形 DP 的复杂度为 \(\mathcal{O}(nm)\)。时间复杂度 \(\mathcal{O}(nmq)\)。
考虑套上动态 DP,设 \(g_{i, x}\) 表示从 \(i\) 的 轻儿子 中选择若干个子树使异或和为 \(x\) 的方案数,那么有转移方程
由于我们要查询全树的 \(\sum f_{i, x}\),所以还需记录 \(h_{i, x}\) 表示 \(\sum\limits_{u \in \mathrm{subtree}(i)} f_{u, x}\),\(lh_{i, x}\) 表示 \(\sum\limits_{u \in \mathrm{lightson}(i)} h_{u, x}\)。设 \(F_i,LF_i,H_i,LH_i\) 分别表示 \(f_i,g_i,h_i,lh_i\) 的异或生成函数,有转移
树剖线段树维护。修改需要实时更新 \(LF\) 和 \(LH\),\(LH\) 可以直接减,\(LF\) 需要维护乘以 \(0\) 的个数与非零值之积,因为乘以 \(0\) 时丢失了信息,不可逆。矩阵乘法的常数优化见 基于变换合并的树上动态 DP 的链分治算法。视 \(n,q\) 同阶,时间复杂度为 \(\mathcal{O}(nm\log^2 nk^3)\),其中 \(k = 2\)。
洛谷上树剖被卡了,必须使用全局平衡二叉树。LOJ 可以通过。
IV. P6573 [BalticOI 2017] Toll
究极套路题。注意到同一层大小仅有 \(k\) 但层数很多,不难想到用矩阵描述每层之间的转移,用线段树支持查询,甚至不需要修改。用向量乘矩阵优化,时间复杂度 \(\mathcal{O}(nk^3+ok^2\log n)\)。
V. P7359 「JZOI-1」旅行
裸题。不带修所以不需要线段树,直接倍增即可。时间复杂度 \(\mathcal{O}((n+q)V^3\log n)\),其中 \(V=2\)。
VI. LOJ #3539. 「JOI Open 2018」猫或狗
给定一棵 \(n\) 个节点的树,节点有权值 \(0/1/2\)。带修权值并查询使所有权值为 \(1\) 的点与权值为 \(2\) 的点不连通最少需要割掉的边数。\(1\leq n\leq 10 ^ 5\)。
启示:连通性相关树上最优化问题考虑将连通性作为 DP 的维度。设 \(f_{i, 0/1}\) 表示使 \(i\) 不与 \(1 / 2\) 连通的最小代价。转移显然:
对于 \(f_{i, 1}\) 同理。带修点权考虑动态 DP,时间复杂度线性对数平方。细节:轻儿子对 \(f\) 的贡献以和的形式计算,满足可减性,因此不需要线段树维护带修半群元素积。
2. 矩阵快速幂优化
2.1 算法简介
矩阵快速幂优化 DP 与动态 DP 的本质思想相同,都是用矩阵描述转移方程。不同的是,前者每一轮的转移方程相同,可以快速幂优化,后者则是套上各种数据结构支持修改。
仍然以斐波那契数列为例,因为每一轮转移的矩阵都是 \(G = \begin{bmatrix} 1 & 1 \\ 1 & 0 \end{bmatrix}\),因此转移 \(n\) 轮的矩阵就是 \(G ^ n\)。即 \(\begin{bmatrix} f_i & f_{i - 1} \end{bmatrix} \times G ^ n\Rightarrow \begin{bmatrix} f_{i + n} & f_{i + n - 1} \end{bmatrix}\)。由于矩阵乘法具有 结合律,因此可以快速幂优化,从而在对数时间内求解问题。
2.2 常见技巧
- 拆点:对于图上转移,当边权不为 \(1\) 时,需要把每个点拆成 \(w\) 个点,\(w\) 是边权。因为 \(f_{i, j}\) 会从 \(f_{u, j - w}\) 转移,所以每个点要维护 \(w\) 个时刻的信息。如例 VII. 和 VIII.
- 向量乘矩阵:对于多组矩阵快速幂询问且转移矩阵 \(G\) 相同,我们预处理 \(G\) 的 \(2\) 的幂次方 \(D_i = G^{2^i}\)。我们知道向量乘矩阵可以做到平方,因此单次查询 \(\vec{A}\times G ^ i\) 在快速幂过程中就不需要 \(G\) 自乘,只需要向量乘矩阵,时间复杂度 \(\mathcal{O}(k^2(k+q)\log V)\)。如例 VIII.
- 对于转移中存在的特殊时刻,可以配合技巧 2 做到特殊点数量 \(\times k^2\log V\) 的时间复杂度,如例 VIII. 与 IX.。
2.3 例题
*I. P3176 [HAOI2015]数字串拆分
题意简述:定义 \(f(s)\) 表示将 \(s\) 拆分成若干个不大于 \(m\) 个数的方案数。给出数字字符串 \(t\),求 \(g(t)=\sum f(x)\),其中 \(x\) 为将 \(t\) 分割成若干个允许有前导零的数后它们的和。例如 \(t=\texttt{12}\) 时,答案为 \(f(1+2)+f(12)\)。\(|s|\leq 500, m \leq 5\)。
注意到 \(m\) 的范围很小,仅有 \(5\),所以 \(f(s)\) 可以用矩阵快速幂 \(m^3\log s\) 计算。记转移矩阵为 \(G\),那么答案即为 \(\left(\sum\limits_x G ^ x \right)_{0,0}\)。我们记 \(D_i\) 表示 \(g'(t[1 : i]) = \sum G ^ x\)(注意区分 \(g\) 和 \(g’\),前者是数值,后者是矩阵),则答案为 \((D_n)_{0,0}\)。
不难写出转移方程 \(D_i = \sum\limits_{j = 0} ^ {i - 1} d_j \times f(t[j + 1 : i])\)。因为 \(t[j + 1 : i]\) 会很大,达到 \(10^n\) 级别,所以快速幂的时候需要对指数高精:矩阵没有费马小定理!时间复杂度为 \(\mathcal{O}(n^3m^3)\),无法承受。
注意到 \(f(t) = G ^ t = \prod\limits_{i = 1} ^ {|t|} G ^ {10 ^ {|t| - i} t_i}\)(\(t\) 是字符串表示的十进制数,\(t_1\) 为最高位),因此我们可以预处理出形如 \(G ^ {c \times 10 ^ k}\ (1 \leq c < 10, 0\leq k < n)\) 的矩阵。记 \(D_{l, r}\) 为 \(f(t[l : r])\),它可以由 \(D_{l + 1, r} \times G ^ {10 ^ {r - l} t_l}\) 得到。
\(nm ^ 3 |\Sigma| + n ^ 2 m ^ 3\) 预处理后即可 \(n^2m^3\) DP:\(d_i = \sum\limits_{j = 0} ^ {i - 1} d_j D_{j + 1, i}\)。其中 \(\Sigma\) 表示字符集即进制数,本题中为 \(10\)。
*II. CF576D Flights for Regular Customers
好题!将所有边按照 \(d_i\) 排序并依次加入,并实时维护经过 \(K\) 条边后能够到达的所有点。
设答案向量为 \(A\),\(A_i = 0/1\) 表示能否走到 \(i\)。有初始状态 \(A_1 = 1\)。设当前走了 \(K\) 步,先让 \(A\) 乘以 \(G\) 的 \(d_j - K\) 次方,其中 \(j\) 是下一条要加的边。加进去后,判断走 \(d_j\) 步能到达的点到 \(n\) 的最短距离 \(D_j\),所有 \(d_j + D_j\) 的最小值即为所求。因为尽管 \(d_j < d_{j + 1}\),但并不一定满足 \(d_j + D_j \leq d_{j + 1} + D_{j + 1}\),故不能在第一次连通时就认为找到答案。
根据或对与的分配律,使用矩阵快速幂解决。01 矩阵乘法用 bitset 优化,时间复杂度 \(\mathcal{O}\left(\dfrac {n m ^ 3\log d} \omega\right)\)。代码。
III. P1707 刷题比赛
有点裸,不过可以用来熟悉矩阵快速幂。
*IV. P4569 [BJWC2011]禁忌
题解。
V. P5059 中国象棋
注意到每一行是独立的,且方案数为 \(fib_{n+3}-(n+2)\):设 \(f_i\) 表示第 \(i\) 列(从 \(1\) 下标开始,共有 \(n+1\) 列)不放棋子且任意两个不放棋子的格子间隔不超过 \(2\) 的方案数,则有 \(f_0=f_1=1\),\(f_i=f_{i-1}+f_{i-2}\), 则 \(f_i=fib_{i+1}\)。总方案数为 \(f_{n+1}+f_n=f_{n+2}=fib_{n+3}\),再减去全部不放的 \(1\) 种和只有一个放的 \(n+1\) 种即可。故答案为 \((fib_{n+3}-n-2)^{n+1}\)。矩阵快速幂计算 \(fib\)。注意 \(P\leq 10^{18}\),慢速乘。时间复杂度 \(\mathcal{O}(\log^2 n)\)。
VI. P1397 [NOI2013] 矩阵游戏
比较裸的矩阵加速 DP。我们没有办法快速十进制转二进制(复杂度 \(\log^2 n\) 直接爆炸),所以只能十进制预处理。时间复杂度 \(\mathcal{O}(\log_{10} n)\),有 \(10\times 2^3=80\) 的常数。
VII. P3597 [POI2015]WYC
非常显然的矩阵快速幂,由于边权只有 \(3\) 所以拆点:存储 \(f_{i,j},f_{i,j+1}\) 和 \(f_{i,j+2}\) 表示以 \(i\) 结尾的长度为 \(j,j+1,j+2\) 的路径数量。最后再记一个 \(sum\) 表示路径总数,得到转移矩阵 \(B\)。预处理出 \(B^1,B^2,\cdots,B^{61}\),然后倍增求解即可。时间复杂度 \(\mathcal{O}(n^3\log k)\),有 \(27\) 倍常数。注意矩阵每个数不可以取模,在任何时候都要对 \(k\) 取 \(\min\)。
*VIII. P6772 [NOI2020] 美食家
结合各种矩阵快速幂的常见优化技巧,拆点 + 预处理矩阵的 \(2\) 的幂次方,容易做到 \(\mathcal{O}((5n)^2(5n+k)\log T)\),复杂度与 \(m\) 无关。
*IX. AT2371 [AGC013E] Placing Squares
考虑平方的组合意义实在是太神仙了,考虑维护 \(g_{i, k} = \sum\limits_{0 \leq j < i} f_j(i - j) ^ k\),其中 \(f_i\) 表示 \([0, i]\) 的答案。转移把柿子写出来,用矩阵快速幂优化即可,注意要分标记点和非标记点讨论。时间复杂度 \(m\times 3^3\times \log n\)。
3. 状态压缩优化
状态压缩优化应用于以集合为状态的动态规划中。此时用 \(0/1\) 表示某个元素是否在集合中,就可以用一个二进制数表示所有状态。
3.1 常见技巧
- 枚举子集:如果一个集合状态 \(S\) 由其所有子集 \(T\subsetneq S\) 转移得到,这样转移的时间复杂度为 \(\sum\limits_{i = 0} ^ n\dbinom n i 2 ^ i=3 ^ n\)。代码实现形如:
for(int T = (S - 1) & S; ; T = (T - 1) & S) {
......
if(!T) break;
}
- 进阶:高维前缀和(SOSDP)和子集卷积(Subset Convolution)本质上也是一种状压 DP。关于 SOSDP 详见 位运算卷积,子集卷积与高维前缀和。
状压 DP 并没有一个很固定的模板,因此本质上仅是用二进制表示集合(或划分)的技巧,而非 DP 的优化方法。此外,状压 DP 是 插头 DP 的基础。
3.2 例题
高难度例题:II, VI, VII, VIII.
I. P1357 花园
注意到 \(m,k\) 非常小而 \(n\) 非常大,明示矩阵快速幂。首先考虑朴素 DP:状压,记 \(f_{i,S}\) 为位置 \(i\) 及其前 \(m-1\) 个位置所表示状态为 \(S\) 时的方案数,转移枚举下一位是 C / P,判断合法性。
由于是环形 DP,所以枚举一开始 \(m\) 个位置的状态 \(S\),初始值 \(f_{m, S} = 1\),那么 \(s\gets s + f_{n + m, S}\)。总时间复杂度 \(\mathcal{O}(2^m\log n(2^m)^3)=\mathcal{O}(16^m\log n)\)。
实际上最终答案可以由转移矩阵 \(G\) 的 \(n\) 次方的对角线求和得到:\(f_{m, S}\) 对 \(f_{n + m, S}\) 有贡献。复杂度降至 \(\mathcal{O}(8^m\log n)\)。
*II. AT695 マス目
题解。
*III. ACM/ICPC Regional Aizu 2013 Hidden Tree
注意到一棵 balanced tree 上所有数都是最小数乘以 \(2\) 的幂,因此,对于不同的 \(p\times 2^r\ (2\nmid p)\) 我们单独处理。
计算每个数中有多少个质因子 \(2\),记做 \(r\),状压 \(f_i\) 表示当前所有数的和为 \(i\) 时,最多的叶节点个数。按位置顺序枚举所有 \(2^r\),并令 \(f_{k+2^r}\gets \max(f_{k+2^r},f_k+1)\ (2^r\mid k)\)。
后面的条件是因为加入 \(2^r\) 之后其后面比 \(2^r\) 小的部分就没法跨过 \(2^r\) 和前面比 \(2^r\) 小的部分互相抵消。记 \(c=\lfloor\log_2n\rfloor+\max r\),最大约为 \(8+9=17\),则时间复杂度为 \(\mathcal{O}(Tn2^c)\)。
IV. 2021 联考模拟北大附 瘟疫公司
给出一张 \(n\) 个点有边权的无向图。定义点集 \(S\) 的代价 \(c_S\) 为连通这些点的最小代价和最大代价异或和。试确定一个点集序列 \(S_1\subset S_2\subset\cdots\subset S_k\) 满足 \(S_1\) 包含 \(1\) 个点且 \(S_k\) 包含所有点,最小化 \(\sum_{i=2}^k|S_i\backslash S_{i-1}|\times c_{S_i}\)。\(n\leq 20\),\(m\leq 100\)。
首先 kruskal \(2^n(n\log n+m)\) 求出每个点集 \(S\) 的代价 \(c_S\),我们有显然的状态设计 \(f_S\) 表示扩展为 \(S\) 的最小代价。朴素暴力是 \(f_S=\min_{T\subset S}f_T+c_S\times |S\backslash T|\),直接计算的复杂度是 \(\mathcal{O}(3^n)\)。但注意到一个关键性质:我们只关心 \(T\) 的大小而非具体包含了哪些元素,这启发我们修改状态设计 \(g_{i,S}\) 表示 \(S\) 大小为 \(i\) 的子集 \(T\) 的 \(\min f_T\)。转移即
时间复杂度 \(\mathcal{O}(2^n(n^2+m))\)。
启示:DP 状态的设计时尽量 忽略无用信息,抓住 对转移有关键影响的量。思路:求出代价 \(\to\) 设计朴素暴力 \(\to\) 发现只有子集大小有关 \(\to\) 将子集大小加入 DP 状态。
V. P5911 [POI2004]PRZ
状压枚举子集,时间复杂度 \(\mathcal{O}(3 ^ n)\)。
*VI. CF1463F Max Correct Set
考虑问题的弱化版本。当 \(x = y\) 时,我们可以构造出一组最优解 \(11\cdots1100\cdots0011\cdots\),即 \(x\) 个 \(1\) 和 \(x\) 个 \(0\) 打包在一起。
因此,对于更一般的情况,我们猜测最优解存在循环节 \(x + y\)。对于前 \(\min(n, x + y)\) 个位置做状压 DP,时间复杂度 \(\mathcal{O}(2 ^ {\max(x, y)}(x + y))\)。证明略。代码。
*VII. CF1152F2 Neko Rules the Catniverse (Large Version)
神仙题。按位置的顺序 DP 显然行不太通,注意到对于所有相邻位置均有值域上的限制,因此考虑 按值域从小到大 DP。
不妨设当前值为 \(i\),考虑要知道哪些信息才能转移。首根据长度限制 \(k\),我们得及时终止,所以要知道序列里已经放了多少个数。记录 \(j\) 表示序列长度为 \(j\)。根据值域限制,只有权值 \(\geq i - m\) 的位置之后或序列的开头才能放。因此,为求出将 \(i\) 放入序列的方案数,记录 \(S\) 表示 \(\geq i - m\) 的权值有哪些在序列中,这是一个状压形式的维度。
转移就很简单了,方案数作为系数直接乘上去:
由于 \(n\) 很大,所以直接 DP 不太行。但是 \(k \times 2 ^ m\) 很小,所以直接矩阵快速幂即可。时间复杂度 \(\mathcal{O}(k ^ 3 8 ^ m\log n)\)。代码。
*VIII. CF1342F Make It Ascending
题目相当于求将序列 \(a\) 划分为若干集合 \(S_1, S_2, \cdots S_c\),集合之间有序,满足 \(S_i\) 之和小于 \(S_{i + 1}\) 之和(单调递增),且存在一个单调上升序列 \(p\) 满足 \(p_i \in S_i\),即我们最终会将 \(S_i\) 所有其它元素累和到原序列位置为 \(p_i\) 的元素上。求最多划分出多少集合。
朴素的想法是将所有限制全部装进 DP 里面,即设 \(f_{i, j, k}\) 表示当前考虑了 mask 为 \(i\) 的数集,最后一个划分出的集合对应的 \(p\) 的最小值为 \(j\),且总和为 \(k\) 时,最多划分出多少集合。转移根据实际意义显然。
这样复杂度太大了,因为我们把值域装了进去。考虑如何把值域去掉。由于若 \(k > k'\) 且 \(f_{i, j, k} \leq f_{i, j, k'}\),则前者显然无用。这说明 对于相同的 \(f_{i, j, k}\),仅有最小的 \(k\) 有用。根据这一性质,我们尝试 忽略无用状态,交换 DP 的某一维度和值域。这意味着,我们设 \(f_{i, j, k}\) 表示当处于上述意义下的 \(i, j\) 以及 集合个数 为 \(k\) 时,最后一个集合的和的最小值。转移即在 \(i\) 这一维枚举子集,同时枚举 \(j, k\)。
转移条件有三个:
- \(\sum\limits_{p \in S} a_p > f_{i, j, k}\)。
- 存在 \(p\in S\) 使得 \(p > j\)。设 \(p_{\min}\) 为最小的这样的 \(p\)。
- \(i \cap S = \varnothing\)。
则 \(f_{i, j, k}\) 可以转移到 \(f_{i \cup S, p_{\min}, k + 1}\),并令后者对 \(\sum\limits_{p\in S} a_p\) 取最小值。容易发现时间复杂度为 \(\mathcal{O}(3 ^ n n ^ 2)\)。由于不合法状态较多,跑不满(若 \(f_{i, j, k}\) 为 \(\infty\) 则不用枚举 \(i\) 的补集的子集),时限非常大,故可以通过。代码。
4. 单调队列优化:\(t\)D / \(e\)D
单调队列优化常见于 任何维度 的动态规划。可见它是多么基础。
4.1 算法简介
“当一个选手比你小还比你强,你就打不过他了”。这是对单调队列非常形象的概括。
具体地,单调队列通过 及时排除不可能成为最优转移的位置,将寻找决策点的复杂度均摊成 \(\mathcal{O}(1)\),从而保证时间复杂度。能够单调队列优化的转移方程一般可写成:
其中 \(A_j\) 是 仅与 \(j\) 有关 的变量,\(B_i\) 是 仅与 \(i\) 有关 的变量,同时还需满足可行决策左端点 \(l_i\) 随着 \(i\) 增加而单调不降。不难发现我们要求 \(f_i + A_i\) 的最大值,其本质就是 滑动窗口:在将元素 \(f_i\) 加入队列 \(Q\) 时,若 \(f_t + A_t\leq f_i + A_i\) 说明 \(t\) 一定不优于 \(i\),不断弹出队尾直到队列为空或 \(f_t + A_t > f_i + A_i\)。同时,在转移时若队首位置 \(h < l_i\) 说明 \(h\) 已经过时,不断弹出队首直到 \(h \geq l_i\)。弹出 \(h\) 使得队列为空的情况在大部分题目中不会发生,因为 \(i-1\in Q\)。部分题目则需要特判。
经过上述操作后,取出队首 \(h\),它一定满足 \(h\in [l_i,i - 1]\) 且 \(f_h + A_h\) 在所有 \([l_i, i - 1]\) 的下标中最大,否则它要么作为队首弹出,要么被某个更大的 \(f + A\) 弹出。因此 \(h\) 就是 \(i\) 的决策点。
4.2 常见技巧
一般的转移方程并不友好,因为贡献 \(val\) 常常与 \(i,j\) 同时有关。此时可尝试将 \(val\) 拆开,写成 \(val=A_j + B_i\) 的形式,如当 \(val=j-i\) 时,\(A_j=j\),\(B_i = -i\),因此将 \(f_j + j\) 而非 \(f_j\) 加入单调队列可保证正确性。
结合下方应用以更好理解。
4.3 应用:单调队列优化多重背包
记物品个数为 \(n\),背包容量为 \(V\)。第 \(i\) 个物品体积为 \(V_i\),价值为 \(val_i\) 且最多放 \(c_i\) 个。设 \(f_{i,j}\) 为前 \(i\) 个物品体积之和为 \(j\) 的最大价值,暴力显然有
考虑 拆贡献:考察每个 \(f_{i-1,j'}\) 对 \(f_{i,j}\ (j'\leq j\land V_i\mid j-j')\) 的贡献:记 \(k = \dfrac{j - j'}{V_i}\),那么 \(0\leq k\leq c_i\),\(f_{i - 1, j'} + k\times val_i\to f_{i, j}\)。注意到 \(k\) 与 \(j,j'\) 同时有关,那么在 \(i\) 固定时,对于每个相差 \(V_i\) 的 \(j\),相同的合法的 \(j'\) 的贡献不一样。
注意到当 \(j\) 增加 \(V_i\) 时,对于相同的 \(j'\),其 \(k\) 值就会增加 \(1\)。遇到这样的情况,我们会在 \(j'\) 处减去一定的关于 \(j'\) 的贡献,并在 \(j\) 处增加一定的关于 \(j\) 的贡献。这本质上是将 \(k\) 看做 \(\left\lfloor\dfrac j {V_i}\right\rfloor - \left\lfloor\dfrac {j'} {V_i}\right\rfloor\)。改写上式:记 \(j=qV_i+r\ (0\leq r<V_i)\),则
这很好理解,因为上式的 \(q\) 就是 \(\left\lfloor\dfrac j {V_i} \right\rfloor\),而我们尝试枚举 \(k\),因此 \(j'\) 对应的 \(q’ = \left\lfloor \dfrac {j'} {V_i} \right\rfloor = \left\lfloor \dfrac j {V_i}\right\rfloor - k = q - k\)。它是一个仅与 \(j’\) 有关的量。
因为对于相同的 \(j'\),\(q’ = q - k\) 的值是定值,为 \(\left\lfloor\dfrac {j’}{V_i}\right\rfloor\),同时 \(q \times val_i\) 是一个只关于 \(j\) 的值,所以可以用单调队列优化区间 \(\max\)。实际上,这就是将 \(j'\to j\) 的贡献减去了 \(\dfrac {j'} {V_i}\),并将 \(j\) 自身的贡献增加了 \(\dfrac{j}{V_i}\)。这并不改变 \(j'\to j\) 的贡献,因为 \(k = \dfrac{j-j'}{V_i}\)。例题如 III.
4.4 例题
I. *P2254 [NOI2005] 瑰丽华尔兹
注意到求最长滑行距离等价于求最少使用魔法的次数,那么设 \(f_{t,i,j}\) 表示 \(t\) 时间使钢琴在 \((i,j)\) 的最少魔法使用次数。\(\mathcal{O}(nmt)\) 无法承受。
注意到一段时间内移动方向相同,设 \(f_{k,i,j}\) 表示在第 \(k\) 段结束后使钢琴在 \((i,j)\) 的最少魔法使用次数。以向右移动为例:设持续时间为 \(L=t_k-s_k+1\),则:
并满足 \((i,p),(i,p+1),\cdots,(i,j)\) 之间没有障碍。使用常见的拆贡献套路,将 \(L-(j-p)\) 拆成 \(p\) 和 \(L-j\),这样贡献就分别与 \(p, j\) 有关,可以使用单调队列优化。其余方向同理,时间复杂度为 \(\mathcal{O}(nmk)\)。
II. P3572 [POI2014]PTA-Little Bird
由于 \(d_j\leq d_i\) 的贡献仅有 \(1\),因此将 \(i\) 压入队列和队尾 \(t\) 比较时,若 \(f_i < f_t\) 或 \(f_i = f_t\land d_i\geq d_t\),说明 \(i\) 不劣于 \(t\):当 \(f_i<f_t\) 时,显然有 \(f_i+[d_i\leq d_{i’}]\leq f_t + [d_t\leq d_{i'}]\)。时间复杂度 \(\mathcal{O}(nq)\)。
III. P3423 [POI2005]BAN-Bank Notes
单调队列优化多重背包模板题。由于要记录转移点,时空复杂度均为 \(\mathcal{O}(nk)\)。
IV. P3487 [POI2009]ARC-Architects
POI 真的很喜欢出 单调队列!
字典序最大给予我们贪心的思路,即优先选择最大的数字肯定更优,若数字相同则尽量选更前面的,因为这样剩下来的选择就更多。如 \([9,7,9,6]\),选前面的 \(9\) 就比选后面的 \(9\) 好。
但是有 \(b_i < b_{i + 1}\) 的限制,说明如果我们选最大的,可能导致后面没法选了。因此不妨设我们在选 \(b_i\),我们只能从下标为 \([b_{i - 1} + 1, k - i + 1]\) 的数当中挑选,因为如果 \(b_i\) 再大一点,那么无论如何我们都选不齐 \(k\) 个数。实现就是经典滑动窗口,若当前数等于单调队列队尾则不弹出,保证了相同数优先选择更前面的。时间复杂度线性。
V. P3512 [POI2010]PIL-Pilots
POI 真的很喜欢出 单调队列!直接 two-pointers + 两个单调队列就做完了。时间复杂度线性。
VI. P3422 [POI2005]LOT-A Journey to Mars
POI 真的很喜欢出 单调队列!一开始看错题,以为可以来回走,以为是个神题,想了两个小时 ……
首先破环成链,考虑从 \(i\) 开始顺时针方向 \(i\to i + 1\to i + 2 \to \cdots \to i + n - 1 \to i + n\) 能不能走到,也就是要满足 \(p_i \geq d_i\),\(p_i + p_{i + 1}\geq d_i + d_{i + 1}\) …… 前缀和 优化一下即对于每个 \(k\in [i, i + n - 1]\),都要有 \(p_k - p_{i - 1} \geq d_k - d_{i - 1}\),稍做变形得到 \(p_{i - 1} - d_{i - 1} \leq \min\limits_{i\leq k < i + n} p_{i - 1} - d_{i - 1}\),经典的滑动窗口。
对于逆时针方向,同理要有 \(d_{i - 1} - p_i \leq \min\limits_{i - n\leq k < i} d_{k - 1} - p_k\)(手动模拟一下容易得到),也是滑动窗口。时间复杂度线性。
*5. wqs 二分优化:2D / 1D
王钦石二分,简称 wqs 二分,又称带权二分,斜率凸优化。常与斜率优化(例题 IX \(\sim\) XII. 详见 Part 7),二分队列(Part 8)等方法结合使用。
该算法常见于 限制选取物品个数 的 DP。它有很明显的标志,因此看起来比较套路。
设 \(f(i)\) 表示最多(或恰好,或至少)选取 \(i\) 个物品时的答案,若 \(f\) 为凸函数则适用 wqs 二分。通常 \(f\) 的凸性难以证明,考场上可以猜结论:\(nk\) 做不了就是凸的。
常见证明凸性的方法:
- 考虑选取 \(i - 1\) 和 \(i + 1\) 个物品的最优方案,调整得到选取 \(i\) 个物品的方案,同时证明 \(f(i)\) 不大于或不小于 \(\dfrac {f(i - 1) + f(i + 1)} 2\)。
- 将问题抽象成费用流模型,则每一滴流量带来的贡献单调不减或单调不增。
不妨设 \(f(i)\) 下凸,即 \(f(i) - f(i - 1)\) 随着 \(i\) 增大而增大。我们将 \(f\) 形成的凸包画出来:
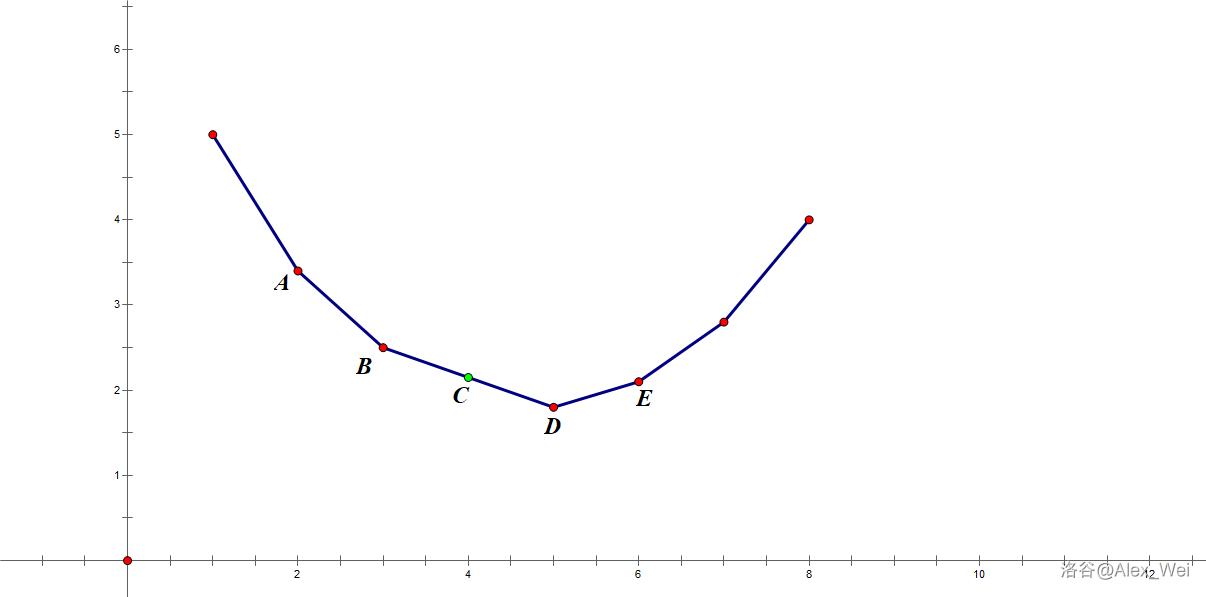
其中用绿色标出的点为 \((m, f(m))\)。
考虑用斜率 \(k\) 的直线 \(\mathscr l_k\) 截凸包,则对于点 \((i, f(i))\),其在 \(y\) 轴上的截距为 \(f(i) - ki\)。如果我们可以求出 \(\mathscr l_k\) 截到的点的横坐标 \(p\) 及其在 \(y\) 轴上的截距 \(b_k\),则根据 \(b_k = f(p) - kp\) 可知 \(f(p) = b_k + kp\)。因此,我们希望 \(p = m\)。这样已知 \(k\) 和 \(b_k\),可得 \(f(m) = b_m + km\)。
通过比较 \(p\) 和 \(m\) 的大小可知 \(k\) 偏大还是偏小。若 \(p < m\) 说明斜率偏小,应当更大;若 \(p = m\) 说明已经找到答案;若 \(p > m\) 说明斜率偏大,应当更小。注意,当 \(f\) 上凸时大小关系会反转,读者应当根据实际意义理解。这样,通过二分可在 \(\log V\) 次给定斜率 \(k\) 求切点的操作后求得 \(f(m)\)。
问题转化为求切点。用 \(\mathscr l_k\) 切下凸包,可知截距为 \(f(p) - kp\) 的最小值,对应横坐标即取到最小值的 \(p\)。换言之,我们希望求出 \(\min\limits_{p = 1} ^ n f(p) - kp\) 以及对应的 \(\mathrm{argmin}\)。
进行一步非常巧妙的转化:我们发现 \(\min\limits_{p = 1} ^ n f(p) - kp\) 即原问题在 每选一个物品有 \(-k\) 的代价 且 不限段数 的情况下的最小代价。因为原问题可用 2D / 1D DP 解决,所以去掉一维物品个数后,用 1D / 1D DP 解决转化后的问题,同时记录 选取物品个数 以求出切点横坐标。得到截距 \(b_k\) 和切点横坐标 \(p\) 后容易根据斜率 \(k\) 算出切点纵坐标 \(f(p) = b_k + kp\)。
时间复杂度为 \(\mathcal{O}(c\log V)\),其中 \(c\) 为一次内层 DP 复杂度,通常 \(c\) 等于 \(\mathcal{O}(n)\) 或 \(\mathcal{O}(n\log n)\)。
5.2 细节:数据类型
大部分题目 \(f(i)\) 为整数,所以斜率 \(\dfrac {f(i + 1) - f(i)} {i + 1 - i} = f(i + 1) - f(i)\) 为整数,因此王钦石二分斜率 \(k\) 为整数。
部分题目涉及小数运算,斜率不是整数。这种情况建议平衡精度与效率,设定二分次数 \(-\log \epsilon\),并在找到解 \(p = m\) 时结束王钦石二分。
5.3 特殊情况:三点共线
三点共线是王钦石二分最重要也最容易出错的细节之一。
三点共线可能导致我们无论如何也二分不到想要的 \(k\)。即斜率为 \(k\) 时 \(p < m\),斜率为 \(k' = k + 1\) 或 \(k - 1\) 时 \(p' > m\)。
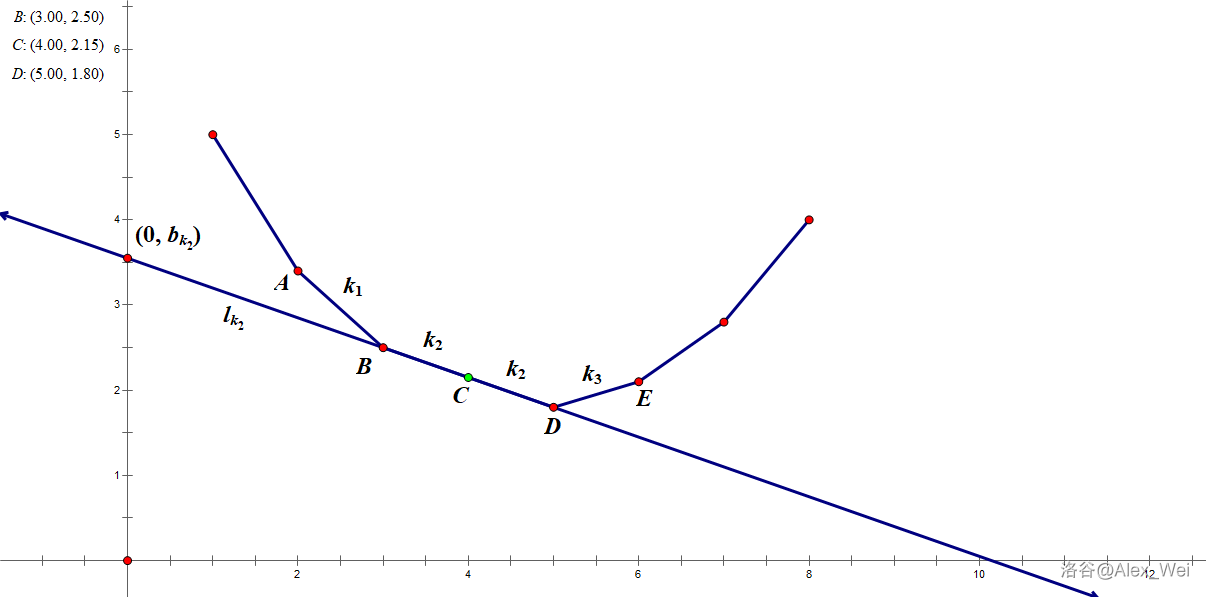
如图,设 \(m = x_C\)。若二分得到斜率 \(k_2\),则无论切到的是点 \(B\),\(C\) 还是 \(D\),斜率为 \(k_2\) 时它们在 \(y\) 轴的截距 \(b_{k_2}\) 相同,所以算出来的 \(f(m) = b_{k_2} + k_2m\) 也相同,不影响最终答案。
有一点需要格外注意:
- 如果在保证答案最优的前提下求得段数最大值,那么当 \(p < m\) 时应有 \(l\gets mid + 1\),\(p > m\) 时应有 \(r\gets mid\)。
- \(k = k_1\) 时截到点 B,因为 \(x_B < x_C\),所以 \(k_1\) 一定不是 我们要找的斜率,\(l\gets mid + 1\)。
- \(k = k_2\) 时截到点 D,因为 \(x_D > x_C\),所以 \(k_2\) 可能是 我们要找的斜率,\(r\gets mid\)。
- 所以 \(mid\) 应为 \(\left \lfloor \dfrac {l + r} 2 \right \rfloor\)。
- 相反,如果求得段数最小值,那么当 \(p < m\) 时应有 \(l\gets mid\),\(p > m\) 时应有 \(r\gets mid - 1\)。
- \(k = k_3\) 时截到的点是 D,因为 \(x_D > x_C\),所以 \(k_3\) 一定不是 我们要找的斜率,\(r\gets mid - 1\)。
- \(k = k_2\) 时截到的点是 B,因为 \(x_B < x_C\),所以 \(k_2\) 可能是 我们要找的斜率,\(l\gets mid\)。
- 所以 \(mid\) 应为 \(\left \lfloor \dfrac {l + r} 2 \right \rfloor + 1\)。
对比上述两种情况,可知在保证答案最优的前提下,求物品个数 最大值 或 最小值 对二分过程有很大影响。
注意:上述结论的前提为 \(f\) 下凸。\(f\) 上凸时可类似讨论。
易错点:注意,若二分求得斜率 \(k\),切点横坐标 \(p\) 及其截距 \(b_k\),则答案为 \(b_k + km\) 而非 \(b_k + kp\)。这是初学者常见错误。根据实际意义理解,\(b_k + kp\) 是 \(f(p)\) 而不是要求的 \(f(m)\)。
5.4 细节:更新答案
若边界值变为 \(mid\) 则更新答案,直接给答案赋值 而不是取 \(\min/\max\)。相反,若边界值变为 \(mid \pm 1\) 则不更新,因为 \(mid\) 处的答案 没有被取到。
如果答案所对应的斜率没有被 DP 过怎么办?实际上不会出现这种情况。类比普通二分能二分出边界值,wqs 二分也能二分出边界斜率。
5.5. 技巧
wqs 二分的常用技巧:用结构体将 DP 值与所选取物品个数结合在一起,不仅方便更新 DP 值,还能快速比较两个 DP 值的偏序关系:根据 5.3 所述细节,若 DP 值相同还需根据所选取的物品个数钦定大小关系。重载运算符可以做到。具体实现见例题 III.
5.6 参考博客
在此感谢这些博主。
- https://www.mina.moe/archives/6349/comment-page-1#comment-1923
- https://blog.csdn.net/a_forever_dream/article/details/105581221
- https://www.cnblogs.com/CreeperLKF/p/9045491.html
5.7 例题
很多时候我们都猜测答案是凸函数,而非严谨证明。
I. P2619 [国家集训队] Tree I
本题是 wqs 二分的经典题。但在这里的用途并不是优化 DP。
设 \(f_i\) 表示恰好选取 \(i\) 条白边时的答案,感性猜测 \(f_i\) 是关于 \(i\) 的下凸函数,使用 wqs 二分即可。
II. CF739E Gosha is hunting
\(n^3\) 的 DP 显然:设 \(f_{i,j,k}\) 表示考虑了前 \(i\) 个神奇宝贝,用了 \(j\) 个宝贝球和 \(k\) 个超级球时期望最大个数。猜测答案 \(F(a,b)\) 关于 \(a,b\) 都上凸,因此对其中一维使用 wqs 二分,时间复杂度平方对数。
更进一步地,两维上都具有凸性使得我们可以二分套二分做到线性对数平方。代码。
*III. P4383 [八省联考2018]林克卡特树
神仙题,顺便巩固一下树形 DP。题目本质是选择 恰好 \(K + 1\) 条树上不相交简单路径,求最大权值。猜测它可以 wqs 二分,实际上确实可以(不然就没法做了)。
尝试设计在 wqs 二分内部的树形 DP。单走一个 \(f\),发现做不了,我们只好多记录一些状态:由于一个节点 度数不超过 \(2\),因此设 \(f_{i,j}\ (j\in[0,2])\) 表示在以 \(i\) 为根的子树中,节点 \(i\) 的度数为 \(j\) 时的答案,且 \(j=1\) 时与 \(i\) 相连的链不计入链的总数,所减去的斜率也不算。这是 记录路径延伸情况 的常见套路。
另外记录当前 DP 值下链的条数的 最大值 方便判断 wqs 二分截得的点的横坐标。记 \(g_i = \max(f_{i, 0}, f_{i, 1} - k, f_{i, 2})\),设当前合并 \(i\) 与其儿子 \(u\),有转移方程:
不难发现 \(g_j\) 表示以 \(j\) 为根的子树中,与 \(j\) 的父亲不连边时的答案,而 \(f_{i, 1} - k\) 相当于在 \(i\) 处直接把链掐断了。因此 \(g_1\) 即为所求。
注意点:计算 \(f_{i,1}\) 时链的总数及其减去的贡献 \(k\) 一定要留着最后形成一条链时计算,否则会使答案错误。此外,同一层 \(i,u\) 内的转移顺序应该是 \(f_{i,2},f_{i,1},f_{i,0}\),观察一下转移方程就能知道原因。时间复杂度线性对数。代码。
*IV. CF802O April Fools' Problem (hard)
神仙题!双倍经验:CF802N April Fools' Problem (medium)。
这个题神仙之处在于如何对贪心进行反悔:\(f(i)\) 下凸,且斜率不可能为负数,因此二分斜率在 \([0,2\times 10^9]\) 之间。
接下来考虑怎么贪心:对于每一个 \(b_i\) 找到在它之前没有被选过的 \(a_j\),若 \(a_j+b_i-k\leq 0\) 则选择 \(a_j\) 并将答案加上 \(a_j+b_i-k\)。但是这样是错的,如 \(k = 5\),\(a = \{1, 233\}\),\(b = \{3, 1\}\),我们会将 \(b_1\) 和 \(a_1\) 匹配,但是 \(b_2+a_1-k\) 更小。
考虑如何反悔:每个 \(b_i\) 要么不选,要么和 \(a_j\) 匹配,贡献为 \(a_j + b_i - k\)。要么把某一个 \(b_j\) 顶替掉,贡献为 \(b_i - b_j\)。将 \(b_i\) 提出,发现我们要找的就是 \(a_j - k\) 和 \(-b_j\) 的最小值,用堆维护即可。注意还需记录堆中的每个数形如 \(a_j - k\) 还是 \(-b_j\),从而计算打印好的题目数量。时间复杂度线性对数平方,代码 非常短。
V. P1484 种树
注意题目求的是 最多 \(k\) 个,所以斜率下界从 \(0\) 开始。这样可以保证二分出来的点一定不在 \(k\) 右边且 \(f_1\) 到 \(f_p\) 单调不降,即 \(f_p\) 为 \(f_1\sim f_k\) 的峰值。若斜率从负数开始,我们二分得到的 \(f_k\) 不一定是最优解,因为可能 \(f_{k - 1} > f_k\):权值有负数。
时间复杂度线性对数,关于本题的反悔贪心解法见例题 VII. 给出的链接。
VI. P1792 [国家集训队]种树
双倍经验。显然如果 \(n<2k\) 则无解。否则破环成链,从 \(1\) 和 \(2\) 开始分别 DP 一遍,最终 DP 结果即第一次的 \(g_{n-1}\) 和第二次的 \(g_n\) 的最大值。时间复杂度同上题。
VII. P3620 [APIO/CTSC 2007]数据备份
三倍经验。相邻两个坐标相减,即求不相邻的 \(k\) 个数之和的最小值,wqs 二分即可。时间复杂度同上题。本题的贪心做法详见 贪心 专题。
四倍经验:SP1553 BACKUP - Backup Files。
VIII. CF958E2 Guard Duty (medium)
五倍经验。
*IX. P5896 [IOI2016] aliens
题解。
*X. P5308 [COCI2019] Quiz
猜想答案关于 \(k\) 是上凸函数,wqs 二分去掉 \(k\) 的限制。设 \(f_i\) 表示剩下 \(i\) 个人时的最大收益,有 \(f_i = \max\limits_{i < j \leq n} f_j + \dfrac {j - i} j\)。显然的斜率优化。时间复杂度 \(\mathcal{O}(wn)\),其中 \(w\) 是设置的二分次数。
XI. P4072 [SDOI2016]征途
注意到题目限制恰好 \(m\) 天,猜想最优答案是关于 \(m\) 的下凸函数,果断 wqs 二分。设 \(s_i\) 为路程长度前缀和,\(d = \dfrac{s_n} m\),方差式子乘上 \(m^2\) 就是 \(m[(l_1-d)^2+(l_2-d)^2+\cdots+(l_m-d)^2]\),其中 \(l_i\) 是每一段路程长度。化简即 \(\sum m(l_i^2-2l_id+d^2)\),\(m\) 个 \(d^2\) 提出来,乘个 \(m\) 再合并同类项就是 \(-s_n^2+\sum ml_i^2\)。
求后一项的最小值可以斜率优化:\(f_i = \min\limits_{j = 0} ^ {i - 1} f_j + m (s_i - s_j) ^ 2\)。时间复杂度线性对数,非常优秀。
XII. P4983 忘情
发现题目中的式子就是 \((1+\sum x_i)^2\),wqs 二分 + 斜率优化。注意 wqs 二分的斜率可以达到 \(-(1+\sum x_i)^2\) 即 \(10 ^ {16}\) 级别。
*XIII. P5633 最小度限制生成树
带权二分。视选择与 \(s\) 相连的边为选择一个物品,将所有这样的边的权值减掉 \(K\)。无解的情况有:每次减去的权值 \(K\) 最大时 \(s\) 的度数大于 \(k\) 或 \(K\) 最小时 \(s\) 的度数小于 \(k\)。
但若每次二分都对边重新排序,时间复杂度无法承受,可以一开始先进行初始化,则二分 check 内部只需要使用归并排序即可。时间复杂度 \(\mathcal{O}(m(\log m+\log V\log n))\)。
注意本题有不使用带权二分的复杂度更优的神仙解法。见 贪心 专题。
*XIV. CF321E Ciel and Gondolas
看到这题笔者首先想到了 \(\mathcal{O}(kn\log n)\) 的决策单调性分治,代码。
猜测答案关于 \(k\) 是上凸函数,故使用 wqs 二分 + 内层决策单调性二分队列将时间复杂度优化为 \(\mathcal{O}(n\log V\log n)\)。代码。
*XV. 某模拟赛 AK 吧
\(q\) 次询问在 \(a_l\sim a_r\) 恰好 选出 \(k\) 段的最大子段和。\(n, q\leq 5\times 10 ^ 4\)。
关于 最多 选 \(k\) 段的最大子段和有经典贪心做法,见 CF280D。但本题显然不可以 \(nq\log n\) 做。
恰好选 \(k\) 段让我们想到 wqs 二分。我们只需求出对于 \(l\sim r\),如果每选一段就要付出 \(K\) 的代价,最终选出几段以及对应的最大值。
区间询问考虑线段树,每个区间 \([l, r]\) 维护区间长度 \(L\) 加 \(1\) 条直线,分别表示选 \(0, 1, 2, \cdots L - 1, L\) 个段对应的代价。因为 固定段数,贡献随着斜率 \(K\) 增大而 线性地 减小(因为每选一段就有 \(K\) 的代价),因此,段数为 \(k\) 的贡献表现出来的就是一条直线 \(y = -kx + b\)。\(b\) 表示恰好选 \(k\) 段的最大子段和,\(x\) 表示二分的斜率,\(y\) 表示此时的贡献。
根据经典结论,\(b_k\) 具有凸性,因此两个区间 \(b_{p, i} = \max\limits_{j = 0} ^ i b_{ls, j} + b_{rs, i - j}\) 可直接类似闵可夫斯基和地贪心合并。并不需要显式地建出凸包,查询时在 \(b\) 上二分即可得到该斜率(即横坐标)对应的段数(即直线斜率)。
由于子段的延伸情况仅和区间端点相关,故对每个区间分别记录两个端点总共四种状态。对于左端点为 \(1\) 的状态,暂时不看作完整子段,当与左边的右端点为 \(0\) 的区间合并时再计入,当与左边的右端点为 \(1\) 的区间合并时可看做单独子段,也可以和左边区间最右子段合并。查询时也类似记录即可。
wqs 二分上下界为 \(\sum a\),为了卡常可以适当调小一点。时间复杂度 \(\mathcal{O}(n\log ^ 2 n(\log n +\log a))\)。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号