《空间三角面片对相交判断算法》的matlab实现_ 0.2微秒
function [flag] = InsectTriPatch(T1,T2)
% 判断两个空间三角形面片是否相交
% T1=[0 0 0;
% 2 0 0;
% 0 1.5 0;
% 0 0 1];
% T2=[0 0 -1;
% 2 0 -1;
% 0 2 -1;
% 0 0 1];
% 出自:《空间三角面片对相交判断算法》
% T=[A;B;C;n]
% A=[x y z]
A1=T1(1,:); % A1点的坐标:[x y z]
B1=T1(2,:);
C1=T1(3,:);
n1=T1(4,:);
A2=T2(1,:);
B2=T2(2,:);
C2=T2(3,:);
n2=T2(4,:);
%判断T2的3个顶点是否在平面π1 同侧
A1A2=A2-A1;
A1B2=B2-A1;
A1C2=C2-A1;
temp1=[dot(A1A2,n1) dot(A1B2,n1) dot(A1C2,n1)];
%判断T1的3个顶点是否在平面π2同侧
A2A1=A1-A2;
A2B1=B1-A2;
A2C1=C1-A2;
temp2=[dot(A2A1,n2) dot(A2B1,n2) dot(A2C1,n2) ];
% 判断temp1 或 temp2 是否同号
if any([all(temp1<0) all(temp1>0) all(temp2<0) all(temp2>0)])
% T1,T2 不相交,return 0
flag=0;
return
else
if all([isequal(cross(n1,n2),[0 0 0]),isequal(temp1,[0 0 0])])
% T1和 T2共面
if DetectVertexInTri(T1,T2)
% 存在T1的顶点在T2内部或者存在T2的顶点在T1内部,判定T1、T2相交, 返回真
flag=1;
return
else
if DetectVertex(T1,T2)
flag=1;
return
else
flag=0;
return
end
end
else
% T1 T2异面
if any([EdgeInsectTri(T1,T2) EdgeInsectTri(T2,T1)])
%存在 T2 边与 T1 相交或存在 T1 的边与 T2相交
flag=1;
return
else
flag=0;
return
end
end
end
end
function is_in= PointInTri(T1,P)
% 函数实现: 判断一点是否在三角形T1内
% T=[A;B;C;n]
% A=[x y z]
A1=T1(1,:); % A1点的坐标:[x y z]
B1=T1(2,:);
C1=T1(3,:);
n1=T1(4,:);
A1B1=B1-A1;
A1C1=C1-A1;
B1C1=C1-B1;
B1A1=A1-B1;
C1A1=A1-C1;
C1B1=B1-C1;
A1P=P-A1;
B1P=p-B1;
C1P=P-C1;
k1=dot(dot(A1P,cross(A1B1,n1)),dot(A1C1,cross(A1B1,n1)));
k2=dot(dot(B1P,cross(B1C1,n1)),dot(B1A1,cross(B1C1,n1)));
k3=dot(dot(C1P,cross(C1A1,n1)),dot(C1B1,cross(C1A1,n1)));
if any([k1 k2 k3]<0)
% k1 k2 k3 存在负值,则P不在T1中
is_in=0;
return
else
is_in=1;
end
end
function flag = DetectVertexInTri(T1,T2)
% 比较:存在T1 的顶点在 T2 内部或者存在 T2 的顶点在T1 内部?
% loop T1
for i=1:3
if PointInTri(T2,T1(i,:))
% 说明T1的顶点在T2内部,T1,T2 相交,return 1
flag=1;
return
end
end
% loop T2
for i=1:3
if PointInTri(T1,T2(i,:))
% 说明T2的顶点在T1内部,T1,T2 相交,return 1
flag=1;
return
end
end
end
function flag=fun2(T2,p1,p2,n)
A2=T2(1,:);
B2=T2(2,:);
C2=T2(3,:);
h1=dot(A2-p1,cross(p2-p1,n));
h2=dot(B2-p1,cross(p2-p1,n));
h3=dot(C2-p1,cross(p2-p1,n));
temp=[h1 h2 h3];
if any([all(temp<0) all(temp>0)])
flag=0;
else
flag=1;
end
end
function flag=DetectVertex(T1,T2)
% 共面-步骤二
% T=[A;B;C;n]
% A=[x y z]
% A1点的坐标:[x y z]
n1=T1(4,:);
n2=T2(4,:);
index=[1 2;2 3;3 1];
% T2的3个顶点
for i=1:3
if fun2(T2,T1(index(i,1),:),T1(index(i,2),:),n1)
flag=1;
else
%有一条边不符合要求,直接返回0,不相交。
flag=0;
return
end
end
% T1的3个顶点
for i=1:3
if fun2(T1,T2(index(i,1),:),T2(index(i,2),:),n2)
flag=1;
else
%有一条边不符合要求,直接返回0,不相交。
flag=0;
return
end
end
flag=1;
end
function flag= EdgeInsectTri(T1,T2)
% 函数实现:判断T2的线段A2B2 B2C2 C2A2是否与三角面片T1相交
index=[1 2;2 3;3 1];
tf=0;
for i=1:3
if fun3(T2(index(i,1),:),T2(index(i,2),:),T1)
% 存在线段和面片相交
flag=1;
return
else
tf=0;
end
end
flag=tf;
end
function flag=fun3(p1,p2,T1)
% 实现:判断边p1p2是否与T1相交
% T=[A;B;C;n]
% A=[x y z]
A1=T1(1,:); % A1点的坐标:[x y z]
B1=T1(2,:);
C1=T1(3,:);
n1=T1(4,:);
s1=cross(p1-A1,n1);
s2=cross(p2-A1,n1);
if all([s1==[0 0 0] s2==[0 0 0]])
% p1p2和T1共面
if any([PointInTri(T1,p1) PointInTri(T1,p2)])
% p1 p2,至少一个点在三角形T1中,则p1p2和T1相交
flag=1;
return
else
flag=0;
return
end
else
% p1p2和T1异面
if dot(s1,s2)>0
% P1P2在T1同侧, 判定不相交;
flag=0;
return
else
g1=dot(dot(p2-A1,cross(B1-A1,p1-A1)),dot(C1-A1,cross(B1-A1,p1-A1)));
g2=dot(dot(p2-B1,cross(C1-B1,p1-B1)),dot(A1-B1,cross(C1-B1,p1-B1)));
g3=dot(dot(p2-C1,cross(A1-C1,p1-C1)),dot(B1-C1,cross(A1-C1,p1-C1)));
if all([g1>0 g2>0 g3>0])
% g1 g2 g3 的计算结果均为非负,p1p2和T1相交
flag=1;
return
elseif any([g1<0 g2<0 g3<0])
% g1 g2 g3 的计算结果存在负值,p1p2和T1不相交
flag=0;
return
end
end
end
end
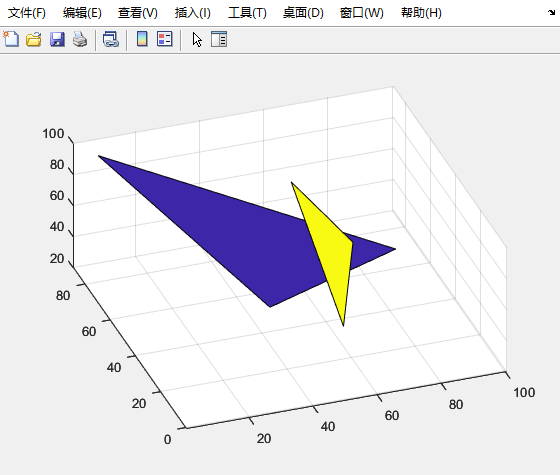
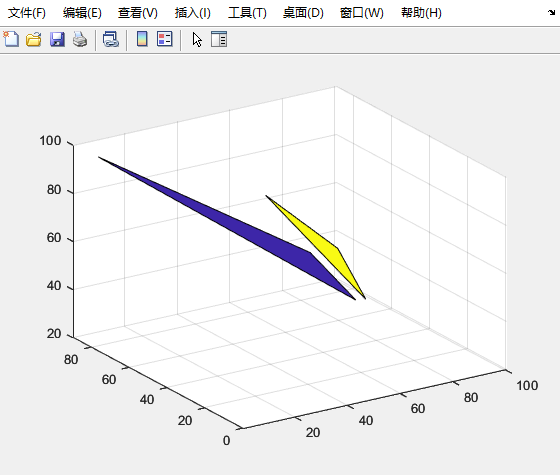
测试代码:
T1=[71.9139 48.8001 56.5830 ;
62.3056 73.4288 70.6124;
52.5847 7.1895 57.6345;
];
T2=[93.0718 68.6186 21.6408 ;
27.4472 1.6631 85.5462 ;
6.2035 83.9585 95.9391];
% plot triangles
v=[T1;T2];
f = [1 2 3;
4 5 6];
patch('Faces', f, 'Vertices', v, 'FaceVertexCData',[1; 0] ,'FaceColor', 'flat');
% caculate norm vector
n1=cross(T1(2,:)-T1(1,:),T1(3,:)-T1(1,:));
n1=n1/norm(n1);
T10=[T1;n1];
n2=cross(T2(2,:)-T2(1,:),T2(3,:)-T2(1,:));
n2=n2/norm(n2);
T20=[T2;n2];
tic
InsectTriPatch(T10,T20)
toc
本文来自博客园,作者:FE-有限元鹰,转载请注明原文链接:https://www.cnblogs.com/aksoam/p/17825798.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号