【Matlab】判断点和多面体位置关系的两种方法实现
分别是向量判别法(算法来自他人论文)、体积判别法(code 是我从网上找的)。
方法一: 向量判别法
方法来自一会议论文:《判断点与多面体空间位置关系的一个新算法_石露》2008年,知网、万方、百度学术有收录。
优点:
- 适合任意多面体
- 计算简单
- 速度快
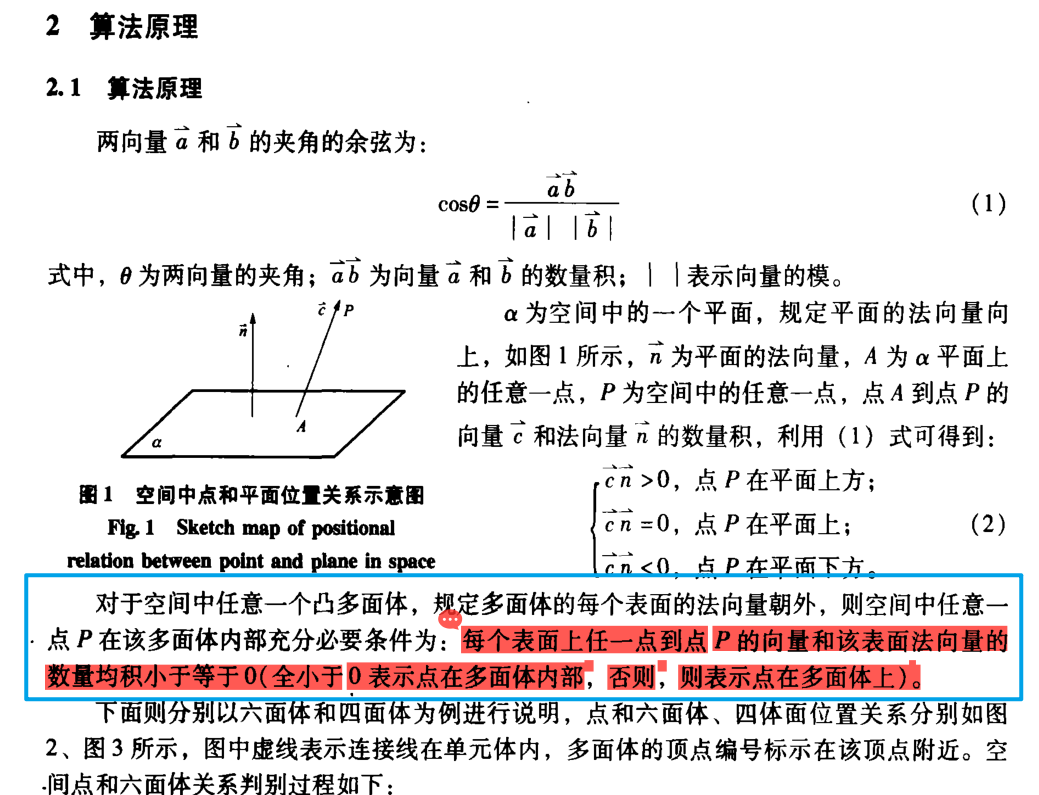
算法原理
Matlab 实现
主函数为InPolyhedronByVJM(Nodes,P),当前仅支持ABAQUS 四面体和五面体单元,其余有需要的可自行在switch语句添加函数。
输入:
- Nodes:包含节点顺序和坐标的N x 3的矩阵
- P:1x3的行向量
这是我根据ABAQUS单元规则编写的函数,因此其他软件的网格信息文件还需要重写。
function flag = InPolyhedronByVJM(Nodes,P)
% 根据向量判别法,判断点和多面体的位置关系.
% 算法依据:石露,白冰,李小春. 判断点与多面体空问位置关系的一个新算法[C].
% 输入:
% + Nodes: n x 3 matrix
% + P : 1 x 3 row vector
% 单元节点顺序需要满足ABAQUS的约定。
% Nodes是一个n x 3的数值矩阵,每一行表示多面体的一个节点的空间坐标。
% 点在多面体内部的充分必要条件:每个face上任一点到点P的向量和该face法向量的数量积都
% 小于等于0,否则在体外。
NumOfNode = size(Nodes, 1);
switch NumOfNode
case 4
flag = InTetrahedron(Nodes, P);
disp('tetra')
case 5
flag = InPyramid(Nodes, P);
disp('parymid')
end
end
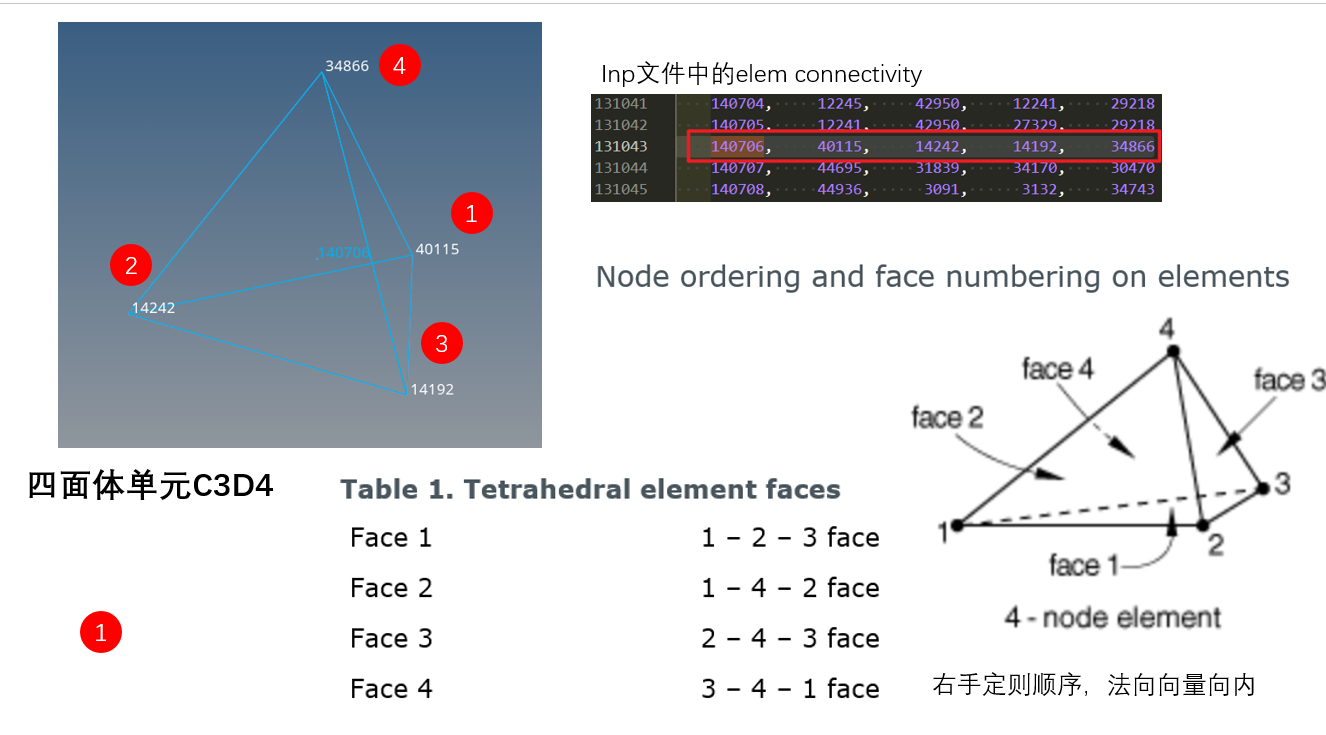
针对C3D4类单元的判别函数
function flag = InTetrahedron(Nodes, P)
% tetra elem have 4 face.
% ABAQUS rule about node ordering and face numbering on element
FaceIDX = [1 2 3;
1 4 2;
2 4 3;
3 4 1];
for faceId = 1 : 1 : size(FaceIDX, 1)
% judge face i: node 1-node 2-node 3 face
% get face normal vector(outside)
n = -1 .* GetNormVector(Nodes(FaceIDX(faceId, 1), :), Nodes(FaceIDX(faceId, 2), :), Nodes(FaceIDX(faceId, 3), :));
% calculate dot product of P and normal vector n
N1P = P - Nodes(FaceIDX(faceId, 1), :);
f = dot(N1P, n);
if f > 0
flag = 0;
return
end
end
flag=1;
end
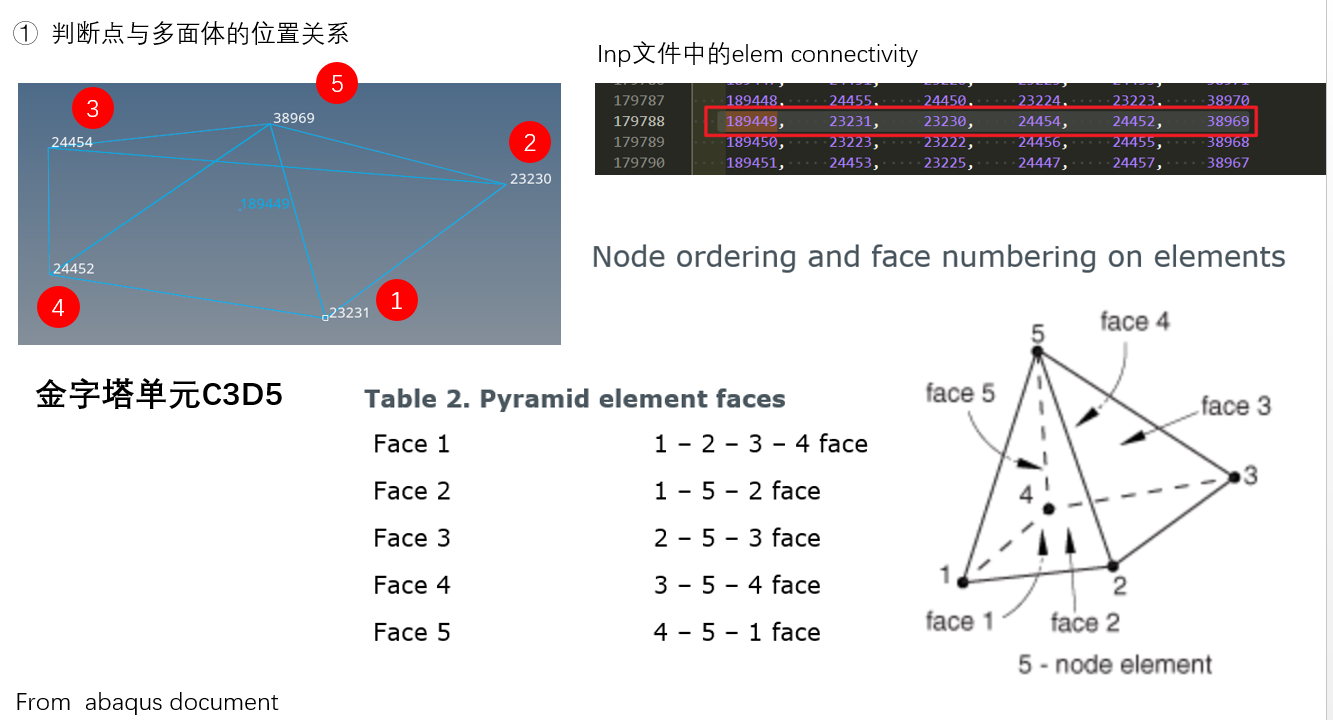
针对C3D5类单元的判别函数
function flag = InPyramid(Nodes, P)
% Pyramid elem have 5 face.
% ABAQUS rule about node ordering and face numbering on element
FaceIDX = [1 2 3 4;
1 5 2 0;
2 5 3 0;
3 5 4 0;
4 5 1 0];
for faceId = 1 : 1 : size(FaceIDX, 1)
% judge face i: node 1-node 2-node 3 face
% get face normal vector(outside)
n = -1 .* GetNormVector(Nodes(FaceIDX(faceId, 1), :), Nodes(FaceIDX(faceId, 2), :), Nodes(FaceIDX(faceId, 3), :));
% calculate dot product of P and normal vector n
N1P = P - Nodes(FaceIDX(faceId, 1), :);
f = dot(N1P, n);
if f > 0
flag = 0;
return
end
end
flag = 1;
end
求面法向向量的函数
function NormalVector = GetNormVector(p1, p2, p3)
% function return a Normal Vector,base on RightHand Rule, according to three point (row vector)
% NormalVector=cross product of (p2-p1) and (p3-p1)
% check
if (~isrow(p1)) || (~isrow(p2)) || (~isrow(p3))
return
end
p1p2 = p2 - p1;
p1p3 = p3 - p1;
NormalVector = cross(p1p2, p1p3);
end
附:abqus四面体和五面体单元的节点约定
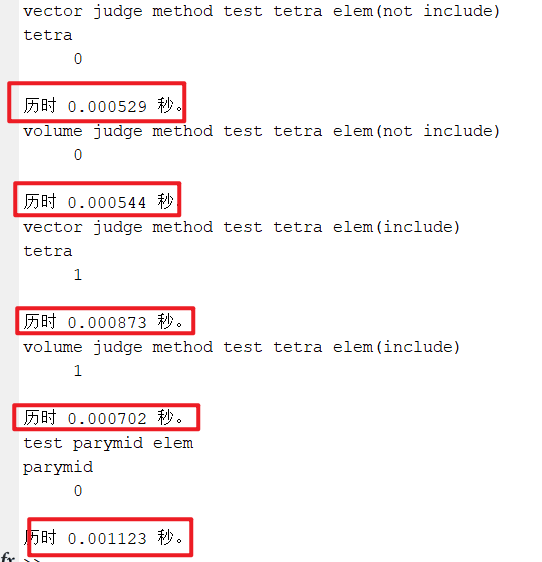
测试Matlab的速度和准确度
%% vector judge method test tetra elem (not include)
Nodes = [40033.883285119, 264.5168630711 , 460.70942035982;
40038.586165682, 269.82366853938, 464.20374836087;
40032.364670267, 268.77493858153, 464.18513138978;
40035.61509136 , 262.38393588741, 466.45744915188];
P = sum(Nodes)/4+[100 0 0];
tic
disp('vector judge method test tetra elem(not include)')
flag = InPolyhedronByVJM(Nodes, P);
disp(flag)
toc
clear
%% volume judge method test tetra elem (not include)
Nodes = [40033.883285119, 264.5168630711 , 460.70942035982;
40038.586165682, 269.82366853938, 464.20374836087;
40032.364670267, 268.77493858153, 464.18513138978;
40035.61509136 , 262.38393588741, 466.45744915188];
P = sum(Nodes)/4+[100 0 0];
tic
disp('volume judge method test tetra elem(not include)')
flag = inpolyhedronByVolCal(Nodes, P);
disp(flag)
toc
clear
%% vector judge method test tetra elem (include)
Nodes = [40033.883285119, 264.5168630711 , 460.70942035982;
40038.586165682, 269.82366853938, 464.20374836087;
40032.364670267, 268.77493858153, 464.18513138978;
40035.61509136 , 262.38393588741, 466.45744915188];
P = sum(Nodes)/4;
tic
disp('vector judge method test tetra elem(include)')
flag = InPolyhedronByVJM(Nodes, P);
disp(flag)
toc
clear
%% volume judge method test tetra elem (include)
Nodes = [40033.883285119, 264.5168630711 , 460.70942035982;
40038.586165682, 269.82366853938, 464.20374836087;
40032.364670267, 268.77493858153, 464.18513138978;
40035.61509136 , 262.38393588741, 466.45744915188];
P = sum(Nodes)/4;
tic
disp('volume judge method test tetra elem(include)')
flag = inpolyhedronByVolCal(Nodes, P);
disp(flag)
toc
clear
%% vector judge method test parymid elem
% node connectivity satisfy abaqus rule
Nodes = [40074.01489458, 184.27859731629, 355.37056669335;
40081.032227826, 179.72253222636, 357.32796879472;
40080.400160415, 184.49866619658, 366.02835222196;
40073.363546048, 189.104242665, 363.93134923301;
40077.379811862, 179.07892353029, 363.81547779482; ];
P = [40077.2381281462+100 183.336592386904 361.294742947572];
tic
disp('test parymid elem')
flag = InPolyhedronByVJM(Nodes, P);
disp(flag)
toc
clear
方法二:体积判别法
这个代码是我在网上找的,出处已经忘了。
Matlab实现(仅限四面体)
function inflag = inpolyhedronByVolCal(points_mat, p_detected)
% input:
% + points_set : 4 point's x y z coordinate,integrated in a 4X3 matrix
% + p_detected : a point needed to detect ,1X3 matrix contain x y z
% coordinate
% return : inflag: 0 or 1
D0 = det([points_mat(1, :) 1;
points_mat(2, :) 1;
points_mat(3, :) 1;
points_mat(4, :) 1]);
D1 = det([p_detected 1;
points_mat(2, :) 1;
points_mat(3, :) 1;
points_mat(4, :) 1]);
D2 = det([points_mat(1, :) 1;
p_detected 1;
points_mat(3, :) 1;
points_mat(4, :) 1]);
D3 = det([points_mat(1, :) 1;
points_mat(2, :) 1;
p_detected 1;
points_mat(4, :) 1]);
D4 = det([points_mat(1, :) 1;
points_mat(2, :) 1;
points_mat(3, :) 1;
p_detected 1]);
if (D0 < 0 && D1 < 0 && D2 < 0 && D3 < 0 && D4 < 0) || ((D0 > 0 && D1 > 0 && D2 > 0 && D3 > 0 && D4 > 0))
inflag = 1;
else
inflag = 0;
end
end
本文来自博客园,作者:FE-有限元鹰,转载请注明原文链接:https://www.cnblogs.com/aksoam/p/17590039.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号