

空间滤波
空间滤波
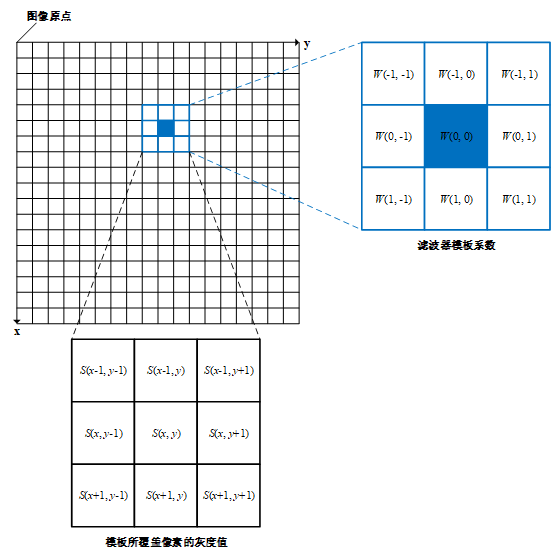
- 空间滤波是在图像平面本身上,逐像素地移动空间模板,同时空间模板与其覆盖的图像像素灰度值按预定义的关系进行运算。模板也称为空间滤波器、核、掩模或窗口。空间滤波一般用于去除图像噪声或增强图像细节,突出感兴趣信息,抑制无效信息,以改善人类的视觉效果或使图像更适合于特定的机器感知与分析。
- 空间滤波主要包括平滑处理和锐化处理两大类。平滑处理主要用于去除图像中一些不重要的细节并减小噪声。锐化处理主要用于突出图像中的细节,增强图像边缘。为了达到较为满意的图像增强效果,通常使用多种互补的空间滤波技术。
- 空间域指的是图像平面本身,是相对于变换域而言的。空间域的图像处理是图像本身不进行频域变换,以图像中的像素为基础对图像进行处理。空间域的图像处理是在像素的邻域进行操作,如空间域平滑处理是通过像素的邻域来平滑图像,空间域锐化处理是通过像素的邻域来锐化图像。
空间滤波机理
- 空间滤波的机理就是在待处理图像上逐像素地移动模板,在每个像素点,滤波器的响应通过事先定义的关系来计算。
- 若滤波器在图像像素上执行的是线性操作,则称为线性滤波器,否则称为非线性滤波器。
- 均值滤波器求解的是模板内像素灰度值的平均值,其是典型的线性滤波器。
- 统计排序滤波器是通过比较给定邻域内的灰度值大小来实现的,原始数据与滤波结果是一种逻辑关系,如最大值滤波器、最小值滤波器、中值滤波器等,都是典型的非线性滤波器。
滤波图像的计算公式

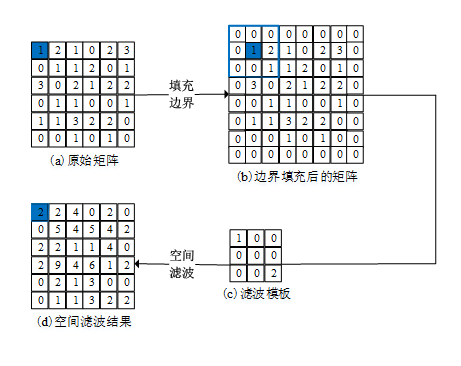
- 对图(a)所示的原始矩阵进行线性空间滤波时,首先通过0灰度值来填充扩展边界,此时图像的上边界和下边界之外各补一行灰度值为0的像素点,左边界和右边界之外各补一列灰度值为0的像素点,如图(b)所示。
- 再对扩展后的图像使用图(C)所示的滤波模板进行滤波处理。空间滤波结果如图(d)所示。
- 滤波结果中,像素灰度值由模板系数与模板所覆盖的像素灰度值的乘积之和求得。如滤波结果的第一个像素的灰度值。
平滑处理
平滑处理常用于模糊处理和降低噪声。平滑滤波器使用给定邻域内像素的平均灰度值或逻辑运算值代替原始图像中像素的灰度值,这种处理降低了图像灰度的“尖锐”变化。然而,图像边缘也是由图像灰度尖锐变化带来的特性,因此平滑空间滤波器有边缘模糊化的负面效应。
平滑空间滤波器可分为平滑线性空间滤波器和平滑非线性空间滤波器。具有代表性的平滑非线性空间滤波器为统计排序滤波器。
平滑线性空间滤波器
平滑线性空间滤波器的输出是给定邻域内的像素灰度值的简单平均值或加权平均值。平滑线性空间滤波器有时也称为均值滤波器。
均值滤波器的一个重要应用是降低图像中的噪声。均值滤波器还有一个重要应用,去除图像的不相关细节,使不相关细节与背景揉合在一起,从而使感兴趣目标更加易于检测,此时模板的大小与不相关细节的尺寸有关。
根据二维高斯函数可以生成高斯平滑滤波器模板。假设现要生成高斯滤波器模板,且要求模板系数之和为1,则滤波器系数如下式所示:

(1) 中值滤波器;

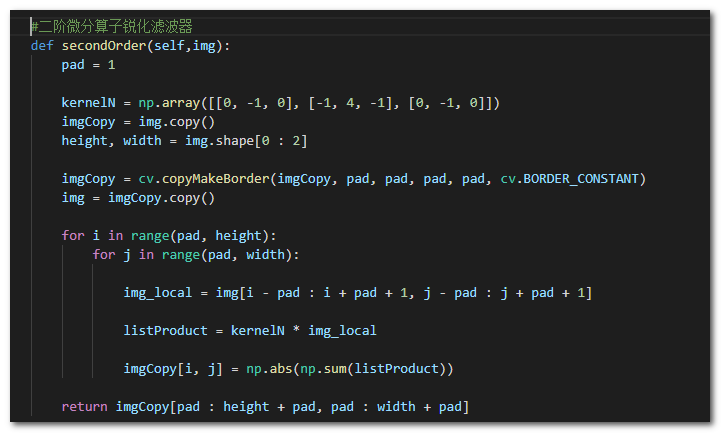
(2) 编写二阶微分算子锐化滤波器;
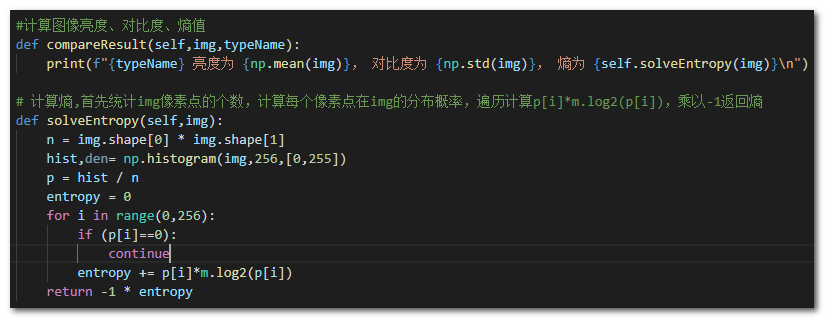
(3)测试图像的亮度、对比度、熵;
(4) 主函数,实例化对象,运行调用各函数;

结果测试
(1)使用二阶微分算子锐化滤波器,生成测试结果;

结果分析:从原I亮度、对比度和熵与均衡化亮度、对比度和熵对比结果中可看出来,经锐化滤波器处理中提高了原图像的亮度、对比度和熵,但由于某些合并的某些像素点数值太大,可能出现过度锐化。
(2)使用中值滤波器,生成测试结果。
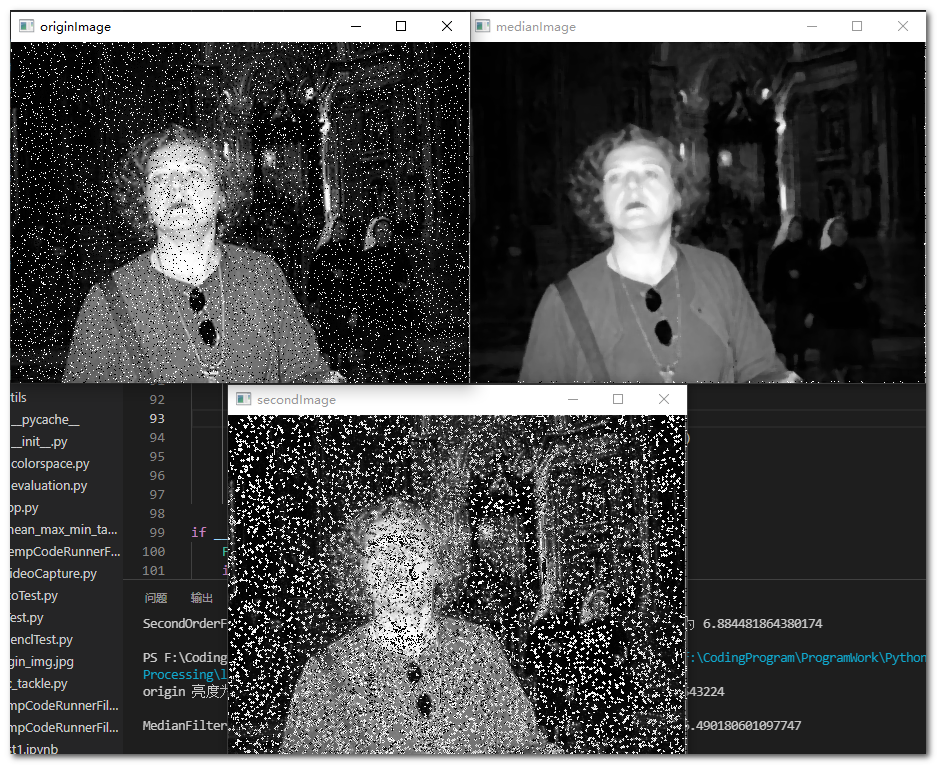

结果分析:从原I亮度、对比度和熵与均衡化亮度、对比度和熵对比结果中可看出来,经中值滤波器中降低了原图像的亮度和对比度,提高了熵值,这是因为中值滤波器把3*3附件的像素值调整成一致状态,把添加的噪声消除,提高了内部的信息量。
