
Ros2 Moveit2 - Robot Model and Robot State
Robot Model and Robot State
在本节中,我们将向您介绍用于在 MoveIt 中使用运动学的 C++ API。
RobotModel 和 RobotState 类
RobotModel 和 RobotState 类是提供对机器人运动学访问权限的核心类。
RobotModel 类包含所有链接和关节之间的关系,包括从 URDF 加载的关节限制属性。RobotModel 还将机器人的连杆和关节划分为 SRDF 中定义的规划组。可以在此处找到有关 URDF 和 SRDF 的单独教程:URDF 和 SRDF 教程。
RobotState 包含有关机器人在特定时间点的信息,存储关节位置的向量以及可选的速度和加速度。此信息可用于获取有关机器人的运动学信息,该信息取决于机器人的当前状态,例如末端执行器的雅可比式。
RobotState 还包含帮助程序函数,用于根据末端执行器位置(笛卡尔姿势)设置手臂位置,以及计算笛卡尔轨迹。
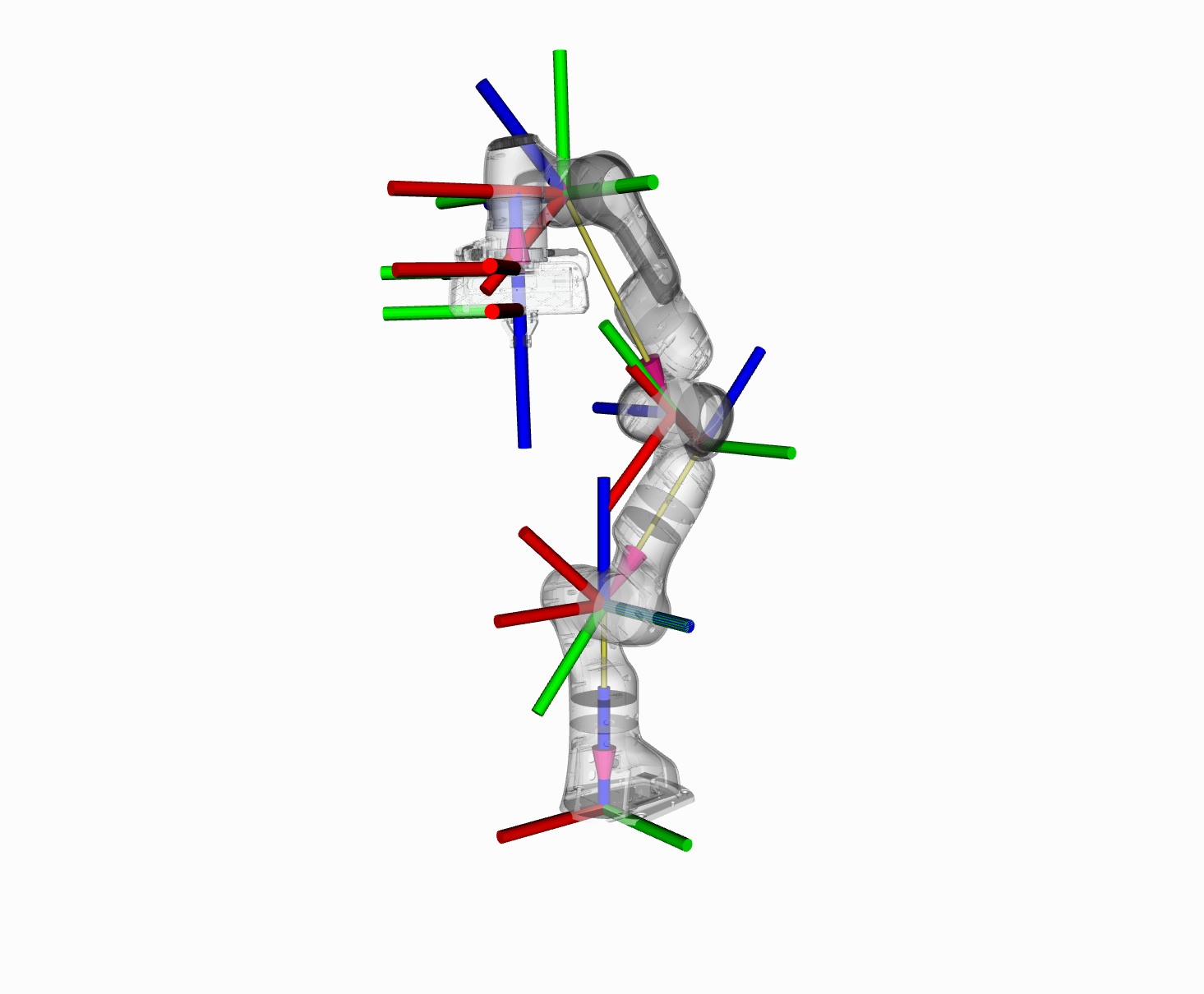
在此示例中,我们将演示将这些类与 Panda 一起使用的过程。
开始
如果尚未执行此操作,请确保已完成“入门”中的步骤。
本教程中的所有代码都可以从您作为 MoveIt 的一部分拥有的包moveit2_tutorials中编译和运行设置。
Roslaunch 启动文件以直接从 moveit2_tutorials运行代码:
ros2 launch moveit2_tutorials robot_model_and_robot_state_tutorial.launch.py
预期输出
预期的输出将采用以下形式。这些数字将不匹配,因为我们使用的是随机关节值:
... [robot_model_and_state_tutorial]: Model frame: world ... [robot_model_and_state_tutorial]: Joint panda_joint1: 0.000000 ... [robot_model_and_state_tutorial]: Joint panda_joint2: 0.000000 ... [robot_model_and_state_tutorial]: Joint panda_joint3: 0.000000 ... [robot_model_and_state_tutorial]: Joint panda_joint4: 0.000000 ... [robot_model_and_state_tutorial]: Joint panda_joint5: 0.000000 ... [robot_model_and_state_tutorial]: Joint panda_joint6: 0.000000 ... [robot_model_and_state_tutorial]: Joint panda_joint7: 0.000000 ... [robot_model_and_state_tutorial]: Current state is not valid ... [robot_model_and_state_tutorial]: Current state is valid ... [robot_model_and_state_tutorial]: Translation: -0.368232 0.645742 0.752193 ... [robot_model_and_state_tutorial]: Rotation: 0.362374 -0.925408 -0.11093 0.911735 0.327259 0.248275 -0.193453 -0.191108 0.962317 ... [robot_model_and_state_tutorial]: Joint panda_joint1: 2.263889 ... [robot_model_and_state_tutorial]: Joint panda_joint2: 1.004608 ... [robot_model_and_state_tutorial]: Joint panda_joint3: -1.125652 ... [robot_model_and_state_tutorial]: Joint panda_joint4: -0.278822 ... [robot_model_and_state_tutorial]: Joint panda_joint5: -2.150242 ... [robot_model_and_state_tutorial]: Joint panda_joint6: 2.274891 ... [robot_model_and_state_tutorial]: Joint panda_joint7: -0.774846 ... [robot_model_and_state_tutorial]: Jacobian: -0.645742 -0.26783 -0.0742358 -0.315413 0.0224927 -0.031807 -2.77556e-17 -0.368232 0.322474 0.0285092 -0.364197 0.00993438 0.072356 2.77556e-17 0 -0.732023 -0.109128 0.218716 2.9777e-05 -0.11378 -1.04083e-17 0 -0.769274 -0.539217 0.640569 -0.36792 -0.91475 -0.11093 0 -0.638919 0.64923 -0.0973283 0.831769 -0.40402 0.248275 1 4.89664e-12 0.536419 0.761708 0.415688 -0.00121099 0.962317
注意:如果您的输出具有不同的 ROS 控制台格式,请不要担心。
整个代码
完整的代码可以在 MoveIt GitHub 项目中查看。
开始
设置开始使用RobotModel类非常简单。一般来说,你会发现大多数高级组件会返回一个指向RobotModel的共享指针。你应该尽可能使用它。在这个例子中,我们将从这样一个共享指针开始,只讨论基本API。你可以查看这些类的实际代码API,以获取更多关于如何使用这些类提供的更多功能的信息。
我们将首先实例化一个RobotModelLoader对象,它将在ROS参数服务器上查找机器人描述并为我们构建一个RobotModel供使用。
robot_model_loader::RobotModelLoader robot_model_loader(node); const moveit::core::RobotModelPtr& kinematic_model = robot_model_loader.getModel(); RCLCPP_INFO(LOGGER, "Model frame: %s", kinematic_model->getModelFrame().c_str());
使用 RobotModel,我们可以 构造一个 RobotState,该 维护机器人的配置。我们将把处于该状态的所有关节设置为其默认值。然后我们可以 获取一个 JointModelGroup, 它代表特定群体的机器人模型,例如熊猫机器人的“panda_arm”。
moveit::core::RobotStatePtr robot_state(new moveit::core::RobotState(kinematic_model)); robot_state->setToDefaultValues(); const moveit::core::JointModelGroup* joint_model_group = kinematic_model->getJointModelGroup("panda_arm"); const std::vector<std::string>& joint_names = joint_model_group->getVariableNames();
获取关节值
我们可以检索存储在 Panda 臂状态中的当前关节值集。
std::vector<double> joint_values; robot_state->copyJointGroupPositions(joint_model_group, joint_values); for (std::size_t i = 0; i < joint_names.size(); ++i) { RCLCPP_INFO(LOGGER, "Joint %s: %f", joint_names[i].c_str(), joint_values[i]); }
关节限制
setJointGroupPositions() 本身并不强制执行关节限制,但调用 enforceBounds() 可以执行此操作。
/* Set one joint in the Panda arm outside its joint limit */ joint_values[0] = 5.57; robot_state->setJointGroupPositions(joint_model_group, joint_values); /* Check whether any joint is outside its joint limits */ RCLCPP_INFO_STREAM(LOGGER, "Current state is " << (robot_state->satisfiesBounds() ? "valid" : "not valid")); /* Enforce the joint limits for this state and check again*/ robot_state->enforceBounds(); RCLCPP_INFO_STREAM(LOGGER, "Current state is " << (robot_state->satisfiesBounds() ? "valid" : "not valid"));
enforceBounds函数是运动规划的一个重要环节,用于保证生成的运动规划是安全的。- 这个函数的作用是检查和修正机器人状态,而不是直接控制机器人电机。
- 真正控制机器人运动的是机器人控制器,它会根据规划好的路径和传感器反馈来驱动电机。
正向运动学
现在,我们可以计算一组随机关节的前向运动学 值。请注意,我们想找到“panda_link8” 的姿势 ,这是机器人的“panda_arm”组。
robot_state->setToRandomPositions(joint_model_group); const Eigen::Isometry3d& end_effector_state = robot_state->getGlobalLinkTransform("panda_link8"); /* Print end-effector pose. Remember that this is in the model frame */ RCLCPP_INFO_STREAM(LOGGER, "Translation: \n" << end_effector_state.translation() << "\n"); RCLCPP_INFO_STREAM(LOGGER, "Rotation: \n" << end_effector_state.rotation() << "\n");
逆运动学
我们现在可以求解 Panda 机器人的逆向运动学 (IK)。 为了解决 IK,我们需要以下内容:
-
末端执行器的所需姿势(默认情况下,这是“panda_arm”链中的最后一个关节): end_effector_state我们在上述步骤中计算得出的。
- 超时:0.1秒。
double timeout = 0.1; bool found_ik = robot_state->setFromIK(joint_model_group, end_effector_state, timeout);
现在,我们可以打印出 IK 解决方案(如果找到):
if (found_ik) { robot_state->copyJointGroupPositions(joint_model_group, joint_values); for (std::size_t i = 0; i < joint_names.size(); ++i) { RCLCPP_INFO(LOGGER, "Joint %s: %f", joint_names[i].c_str(), joint_values[i]); } } else { RCLCPP_INFO(LOGGER, "Did not find IK solution"); }
获取雅可比
我们也可以从 RobotState 获取雅可比矩阵
Eigen::Vector3d reference_point_position(0.0, 0.0, 0.0); Eigen::MatrixXd jacobian; robot_state->getJacobian(joint_model_group, robot_state->getLinkModel(joint_model_group->getLinkModelNames().back()), reference_point_position, jacobian); RCLCPP_INFO_STREAM(LOGGER, "Jacobian: \n" << jacobian << "\n");
启动文件
要运行代码,您需要一个执行两项操作的启动文件:
-
将 Panda URDF 和 SRDF 加载到参数服务器上,然后
- 将 MoveIt Setup Assistant 生成的kinematics_solver配置放到实例化本教程中类的节点命名空间中的 ROS 参数服务器上。
from launch import LaunchDescription from launch_ros.actions import Node from moveit_configs_utils import MoveItConfigsBuilder def generate_launch_description(): moveit_config = MoveItConfigsBuilder("moveit_resources_panda").to_moveit_configs() tutorial_node = Node( package="moveit2_tutorials", executable="robot_model_and_robot_state_tutorial", output="screen", parameters=[ moveit_config.robot_description, moveit_config.robot_description_semantic, moveit_config.robot_description_kinematics, ], ) return LaunchDescription([tutorial_node])

 浙公网安备 33010602011771号
浙公网安备 33010602011771号