
ros - slam - microros - 两轮差速模型运动学 - 运动学正解
上一节了解了两轮差速运动学,本节我们线进一步的了解两轮差速正运动学的推导过程,并利用两轮差速运动学正解,来完成对小车的实时速度计算。
一、正运动学解推导
两轮差速机器人是一种常见的移动机器人类型,由两个轮子和一个中心点组成。我们可以通过控制每个轮子的转速来实现移动,并且可以在一个平面上进行自由移动。
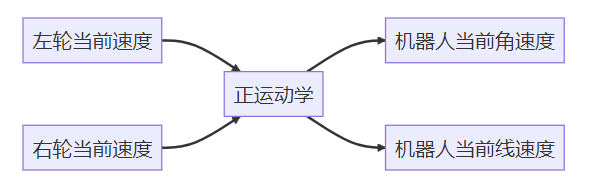
前面章节我们通过PID+编码器完成了FishBot底盘两个轮子单独速度的测量,但是在实际使用当中,我们把机器人当作一个整体来看,而对于这样一个整体在空间中的速度,我们一般采用X轴线速度
𝑣 和Z轴角速度 ω 来描述。
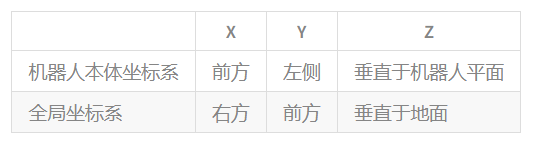
需要注意的是:在ROS中,机器人的前方通常指的是机器人本体坐标系的正方向。本体坐标系是相对于机器人自身的一个坐标系,通常定义在机器人的中心位置,以机器人的前进方向为X轴,左侧为Y轴,垂直于机器人平面的方向为Z轴。
而全局坐标系中的正方向X轴指向右方,Y轴指向前方,Z轴垂直于地面。
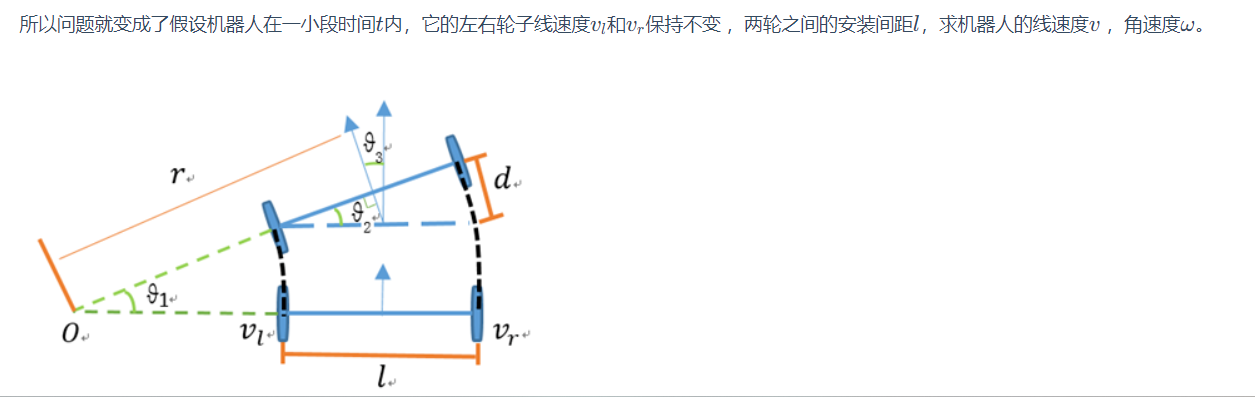
我们看上图来推导
因为机器人的线速度方向和轮子转动方向始终保持一致,所以机器人的线速度为做右轮线速度的平均值,即:
我们知道
𝑣=𝜔∗𝑟, 根据上图所以有:
同一个机器人角速度相同,所以有:

可以求出
二、正运动学代码实现
2.1 新建工程
从本节开始我们持续的在一个工程上进行开发,推荐大家建立代码仓库,并将代码用git进行管理起来。
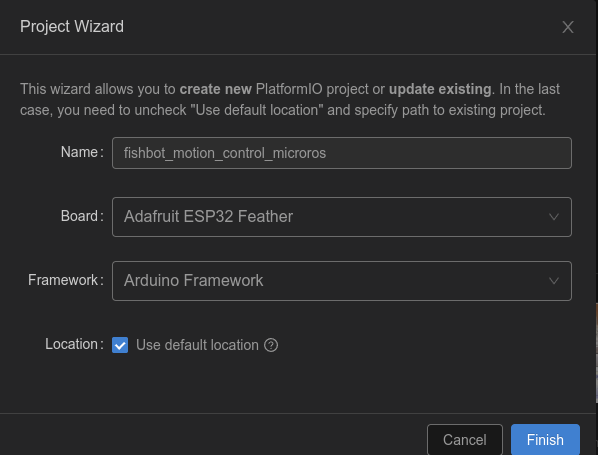
在PlatformIO上新建fishbot_motion_control_microros工程。
添加依赖
[env:featheresp32] platform = espressif32 board = featheresp32 framework = arduino board_microros_transport = wifi board_microros_distro = humble board_build.f_cpu = 240000000L board_build.f_flash = 80000000L monitor_speed = 115200 lib_deps = https://gitee.com/ohhuo/micro_ros_platformio.git https://github.com/fishros/Esp32McpwmMotor.git https://github.com/fishros/Esp32PcntEncoder.git
接着将前面章节中pid_controller样例程序的lib下的内容和main.cpp内容复制过来,最终就目录结构如下:
.
├── include
│ └── README
├── lib
│ ├── PidController
│ │ ├── PidController.cpp
│ │ └── PidController.h
│ └── README
├── LICENSE
├── platformio.ini
├── src
│ └── main.cpp
└── test
├── my_main.cpp
├── README
2.2 添加Kinematic库
在lib下添加Kinematics文件夹,并添加Kinematics.h和Kinematics.cpp文件。
编写Kinematics.h
/** * @file Kinematics.h * @author fishros@foxmail.com * @brief 机器人模型设置,编码器轮速转换,ODOM推算,线速度角速度分解 * @version V1.0.0 * @date 2022-12-10 * * @copyright Copyright www.fishros.com (c) 2022 * */ #ifndef __KINEMATICS_H__ #define __KINEMATICS_H__ #include <Arduino.h> typedef struct { uint8_t id; // 电机编号 uint16_t reducation_ratio; // 减速器减速比,轮子转一圈,电机需要转的圈数 uint16_t pulse_ration; // 脉冲比,电机转一圈所产生的脉冲数 float wheel_diameter; // 轮子的外直径,单位mm float per_pulse_distance; // 无需配置,单个脉冲轮子前进的距离,单位mm,设置时自动计算 // 单个脉冲距离=轮子转一圈所行进的距离/轮子转一圈所产生的脉冲数 // per_pulse_distance= (wheel_diameter*3.1415926)/(pulse_ration*reducation_ratio) uint32_t speed_factor; // 无需配置,计算速度时使用的速度因子,设置时自动计算,speed_factor计算方式如下 // 设 dt(单位us,1s=1000ms=10^6us)时间内的脉冲数为dtick // 速度speed = per_pulse_distance*dtick/(dt/1000/1000)=(per_pulse_distance*1000*1000)*dtic/dt // 记 speed_factor = (per_pulse_distance*1000*1000) int16_t motor_speed; // 无需配置,当前电机速度mm/s,计算时使用 int64_t last_encoder_tick; // 无需配置,上次电机的编码器读数 uint64_t last_update_time; // 无需配置,上次更新数据的时间,单位us } motor_param_t; class Kinematics { private: motor_param_t motor_param_[2]; float wheel_distance_; // 轮子间距 public: Kinematics(/* args */) = default; ~Kinematics() = default; /** * @brief 设置电机相关参数 * * @param id * @param reducation_ratio * @param pulse_ration * @param wheel_diameter */ void set_motor_param(uint8_t id, uint16_t reducation_ratio, uint16_t pulse_ration, float wheel_diameter); /** * @brief 设置运动学相关参数 * * @param wheel_distance */ void set_kinematic_param(float wheel_distance); /** * @brief 运动学逆解,输入机器人当前线速度和角速度,输出左右轮子应该达到的目标速度 * * @param line_speed * @param angle_speed * @param out_wheel1_speed * @param out_wheel2_speed */ void kinematic_inverse(float line_speed, float angle_speed, float &out_wheel1_speed, float &out_wheel2_speed); /** * @brief 运动学正解,输入左右轮子速度,输出机器人当前线速度和角速度 * * @param wheel1_speed * @param wheel2_speed * @param line_speed * @param angle_speed */ void kinematic_forward(float wheel1_speed, float wheel2_speed, float &line_speed, float &angle_speed); /** * @brief 更新轮子的tick数据 * * @param current_time * @param motor_tick1 * @param motor_tick2 */ void update_motor_ticks(uint64_t current_time, int32_t motor_tick1, int32_t motor_tick2); /** * @brief 获取轮子当前速度 * * @param id * @return float */ float motor_speed(uint8_t id); }; #endif // __KINEMATICS_H__
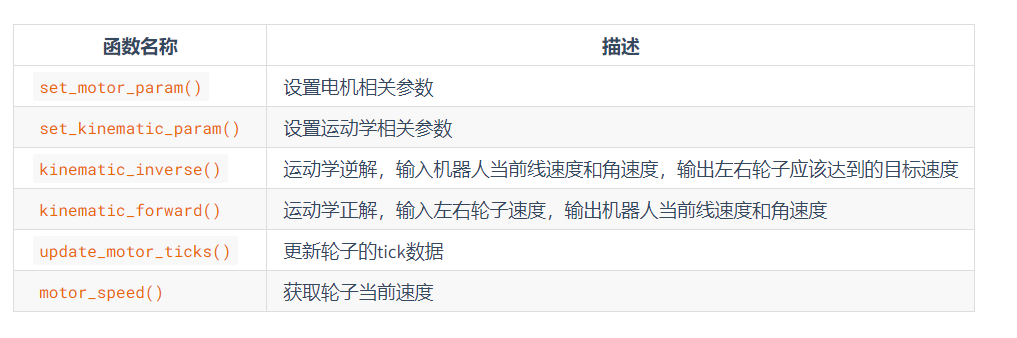
这里主要定义了一个电机参数结构体,并定义了一个类,该类包含以下6个函数:
2.3 Kinematics.cpp代码实现
#include "Kinematics.h" void Kinematics::set_motor_param(uint8_t id, uint16_t reducation_ratio, uint16_t pulse_ration, float wheel_diameter) { motor_param_[id].id = id; // 设置电机ID motor_param_[id].reducation_ratio = reducation_ratio; // 设置减速比 motor_param_[id].pulse_ration = pulse_ration; // 设置脉冲比 motor_param_[id].wheel_diameter = wheel_diameter; // 设置车轮直径 motor_param_[id].per_pulse_distance = (wheel_diameter * PI) / (reducation_ratio * pulse_ration); // 每个脉冲对应行驶距离 motor_param_[id].speed_factor = (1000 * 1000) * (wheel_diameter * PI) / (reducation_ratio * pulse_ration); // 计算速度因子 Serial.printf("init motor param %d: %f=%f*PI/(%d*%d) speed_factor=%d\n", id, motor_param_[id].per_pulse_distance, wheel_diameter, reducation_ratio, pulse_ration, motor_param_[id].speed_factor); // 打印调试信息 } void Kinematics::set_kinematic_param(float wheel_distance) { wheel_distance_ = wheel_distance; // 设置轮间距离 } void Kinematics::update_motor_ticks(uint64_t current_time, int32_t motor_tick1, int32_t motor_tick2) { uint32_t dt = current_time - motor_param_[0].last_update_time; // 计算时间差 int32_t dtick1 = motor_tick1 - motor_param_[0].last_encoder_tick; // 计算电机1脉冲差 int32_t dtick2 = motor_tick2 - motor_param_[1].last_encoder_tick; // 计算电机2脉冲差 // 轮子速度计算 motor_param_[0].motor_speed = dtick1 * (motor_param_[0].speed_factor / dt); // 计算电机1轮子速度 motor_param_[1].motor_speed = dtick2 * (motor_param_[1].speed_factor / dt); // 计算电机2轮子速度 motor_param_[0].last_encoder_tick = motor_tick1; // 更新电机1上一次的脉冲计数 motor_param_[1].last_encoder_tick = motor_tick2; // 更新电机2上一次的脉冲计数 motor_param_[0].last_update_time = current_time; // 更新电机1上一次更新时间 motor_param_[1].last_update_time = current_time; // 更新电机2上一次更新时间 } void Kinematics::kinematic_inverse(float linear_speed, float angular_speed, float &out_wheel1_speed, float &out_wheel2_speed) { } void Kinematics::kinematic_forward(float wheel1_speed, float wheel2_speed, float &linear_speed, float &angular_speed) { linear_speed = (wheel1_speed + wheel2_speed) / 2.0; // 计算线速度 angular_speed = (wheel2_speed - wheel1_speed) / wheel_distance_; // 计算角速度 } float Kinematics::motor_speed(uint8_t id) { return motor_param_[id].motor_speed; // 返回指定id的轮子速度 }
2.4 修改main.cpp
#include <Arduino.h> #include <micro_ros_platformio.h> // 包含用于 ESP32 的 micro-ROS PlatformIO 库 #include <WiFi.h> // 包含 ESP32 的 WiFi 库 #include <rcl/rcl.h> // 包含 ROS 客户端库 (RCL) #include <rclc/rclc.h> // 包含用于 C 的 ROS 客户端库 (RCLC) #include <rclc/executor.h> // 包含 RCLC 执行程序库,用于执行订阅和发布 #include <geometry_msgs/msg/twist.h> // 包含 ROS2 geometry_msgs/Twist 消息类型 #include <Esp32PcntEncoder.h> // 包含用于计数电机编码器脉冲的 ESP32 PCNT 编码器库 #include <Esp32McpwmMotor.h> // 包含使用 ESP32 的 MCPWM 硬件模块控制 DC 电机的 ESP32 MCPWM 电机库 #include <PidController.h> // 包含 PID 控制器库,用于实现 PID 控制 #include <Kinematics.h> // 运动学相关实现 Esp32PcntEncoder encoders[2]; // 创建一个长度为 2 的 ESP32 PCNT 编码器数组 rclc_executor_t executor; // 创建一个 RCLC 执行程序对象,用于处理订阅和发布 rclc_support_t support; // 创建一个 RCLC 支持对象,用于管理 ROS2 上下文和节点 rcl_allocator_t allocator; // 创建一个 RCL 分配器对象,用于分配内存 rcl_node_t node; // 创建一个 RCL 节点对象,用于此基于 ESP32 的机器人小车 rcl_subscription_t subscriber; // 创建一个 RCL 订阅对象,用于订阅 ROS2 消息 geometry_msgs__msg__Twist sub_msg; // 创建一个 ROS2 geometry_msgs/Twist 消息对象 Esp32McpwmMotor motor; // 创建一个 ESP32 MCPWM 电机对象,用于控制 DC 电机 float out_motor_speed[2]; // 创建一个长度为 2 的浮点数数组,用于保存输出电机速度 PidController pid_controller[2]; // 创建PidController的两个对象 Kinematics kinematics; // 运动学相关对象 void twist_callback(const void *msg_in) { const geometry_msgs__msg__Twist *twist_msg = (const geometry_msgs__msg__Twist *)msg_in; static float target_motor_speed1, target_motor_speed2; float linear_x = twist_msg->linear.x; // 获取 Twist 消息的线性 x 分量 float angular_z = twist_msg->angular.z; // 获取 Twist 消息的角度 z 分量 kinematics.kinematic_inverse(linear_x * 1000, angular_z, target_motor_speed1, target_motor_speed2); pid_controller[0].update_target(target_motor_speed1); pid_controller[1].update_target(target_motor_speed2); } // 这个函数是一个后台任务,负责设置和处理与 micro-ROS 代理的通信。 void microros_task(void *param) { // 设置 micro-ROS 代理的 IP 地址。 IPAddress agent_ip; agent_ip.fromString("192.168.2.105"); // 使用 WiFi 网络和代理 IP 设置 micro-ROS 传输层。 set_microros_wifi_transports("fishbot", "12345678", agent_ip, 8888); // 等待 2 秒,以便网络连接得到建立。 delay(2000); // 设置 micro-ROS 支持结构、节点和订阅。 allocator = rcl_get_default_allocator(); rclc_support_init(&support, 0, NULL, &allocator); rclc_node_init_default(&node, "esp32_car", "", &support); rclc_subscription_init_default( &subscriber, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(geometry_msgs, msg, Twist), "/cmd_vel"); // 设置 micro-ROS 执行器,并将订阅添加到其中。 rclc_executor_init(&executor, &support.context, 1, &allocator); rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &twist_callback, ON_NEW_DATA); // 循环运行 micro-ROS 执行器以处理传入的消息。 while (true) { delay(100); rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)); } } void setup() { // 初始化串口通信,波特率为115200 Serial.begin(115200); // 将两个电机分别连接到引脚22、23和12、13上 motor.attachMotor(0, 22, 23); motor.attachMotor(1, 12, 13); // 在引脚32、33和26、25上初始化两个编码器 encoders[0].init(0, 32, 33); encoders[1].init(1, 26, 25); // 初始化PID控制器的kp、ki和kd pid_controller[0].update_pid(0.625, 0.125, 0.0); pid_controller[1].update_pid(0.625, 0.125, 0.0); // 初始化PID控制器的最大输入输出,MPCNT大小范围在正负100之间 pid_controller[0].out_limit(-100, 100); pid_controller[1].out_limit(-100, 100); // 设置运动学参数 kinematics.set_motor_param(0, 45, 44, 65); kinematics.set_motor_param(1, 45, 44, 65); kinematics.set_kinematic_param(150); // 在核心0上创建一个名为"microros_task"的任务,栈大小为10240 xTaskCreatePinnedToCore(microros_task, "microros_task", 10240, NULL, 1, NULL, 0); } void loop() { static float out_motor_speed[2]; static uint64_t last_update_info_time = millis(); kinematics.update_motor_ticks(micros(), encoders[0].getTicks(), encoders[1].getTicks()); out_motor_speed[0] = pid_controller[0].update(kinematics.motor_speed(0)); out_motor_speed[1] = pid_controller[1].update(kinematics.motor_speed(1)); motor.updateMotorSpeed(0, out_motor_speed[0]); motor.updateMotorSpeed(1, out_motor_speed[1]); // 延迟10毫秒 delay(10); }
这里主要调用Kinematic完成相关函数的调用。
主要有下面几行
// 初始化运动学相关对象 Kinematics kinematics; // 设置运动学参数 kinematics.set_motor_param(0, 45, 44, 65); kinematics.set_motor_param(1, 45, 44, 65); kinematics.set_kinematic_param(150); // 更新电机速度 kinematics.update_motor_ticks(micros(), encoders[0].getTicks(), encoders[1].getTicks()); // 运动学逆解 kinematics.kinematic_inverse(linear_x * 1000, angular_z, target_motor_speed1, target_motor_speed2);
三、上传测试
下载代码,运行agent,点击RST按键。
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
看到连接建立表示通信成功,接着用ros2 topic list
看到/cmd_vel表示正常,接着我们使用teleop_twist_keyboard进行键盘控制
ros2 run teleop_twist_keyboard teleop_twist_keyboard
随便发送一个指令,打开串口,观察打印
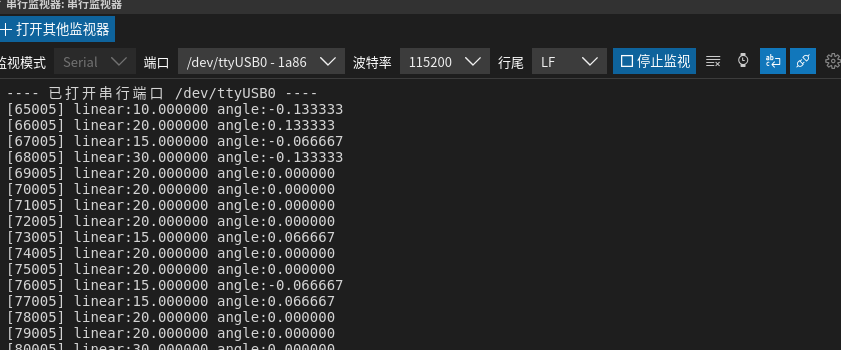
速度一直在20左右徘徊,和我们设置的速度相同。
void Kinematics::kinematic_inverse(float linear_speed, float angular_speed, float &out_wheel1_speed, float &out_wheel2_speed) { // 直接返回指定速度20mm/s out_wheel1_speed = 20; out_wheel2_speed = 20; }
四、扩展-Git初体验
4.1 Git使用简介
安装 Git:如果你的系统中没有 Git,可以通过以下命令进行安装:
sudo apt update
sudo apt install git
配置 Git:在使用 Git 之前,你需要设置用户名和邮箱地址,这样 Git 才能正确地记录你的提交信息。使用以下命令配置 Git:
arduino git config --global user.name "Your Name" git config --global user.email "youremail@example.com"
将 "Your Name" 替换为你的姓名,"youremail@example.com" 替换为你的邮箱地址。
创建一个 Git 仓库:如果你要将一个现有的项目纳入 Git 的版本控制下,可以使用以下命令将其转化为一个 Git 仓库:
cd /path/to/your/project
git init
将文件添加到 Git 仓库:使用以下命令将文件添加到 Git 仓库:
git add filename
其中,"filename" 是要添加到 Git 仓库中的文件名。如果你要将所有文件添加到 Git 仓库中,可以使用以下命令:
git commit -m "commit message"
其中,"commit message" 是提交信息,需要用简短的文字描述本次提交的更改内容。
4.2 提交本节代码
根据上面的介绍我们可以使用git来将这一节的代码保存
安装
sudo apt install git
初始化仓库,配置邮箱和用户名
cd fishbot_motion_control_microros
git init
提交本次所有代码
git add . git commit -m "feat(16.12):完成运动学正解" git log

 浙公网安备 33010602011771号
浙公网安备 33010602011771号