
ros2 - slam - 编码器测速原理
上节做完小车,遥控时小车前进时你应该会发现,小车很难走一条直线,但明明我们给到两个电机的PWM占空比都是相同的,原因在于每一个电机的硬件参数并不能完全的保证一致,所以当我们采用开环控制时,即使我们给到每个电机相同的电压,也不能让两个电机保持相同的转速。
要解决这个问题我们就要把开环控制改成闭环控制,我们要实现的是速度闭环,所以第一步我们要实现的是对电机速度的测量。
第一节中介绍过,我们采用的是AB磁编码器,编码器直接连接到了我们的单片机IO上,当电机转动时,IO上的电平高低就会产生变化,我们称这种电平从低到高再到低的过程称作一个脉冲。
因为有减速机的存在,当减速器的输出轴(轮胎)转动了一圈,我们会检测到多个脉冲。所以要想通过编码器得出轮子的速度,我们需要知道检测到一个脉冲时,轮子行走多远距离。
我们FishBot上的电机轮子直径为65mm,当轮子转一圈时产生N个脉冲,那么一个脉冲轮子前进的距离D可以这样计算,单位是mm。

二、轮速测量原理
你可能会好奇,为什么我们的电机后面有两个霍尔传感器,用一个不就可以对电机进行测速了吗?原因是使用两个会更精准,同时可以测量方向。
我们把磁铁看作小汽车,AB两个传感器是一条路上前后两个摄像头,如果汽车是正着行驶的,你会发现总是A摄像头先看到汽车,然后再是B,但如果反过来行驶,则是B摄像头先看到设备。
[A] [B] ------------------------------------------------------------- [汽车-->] [<--汽车] -------------------------------------------------------------
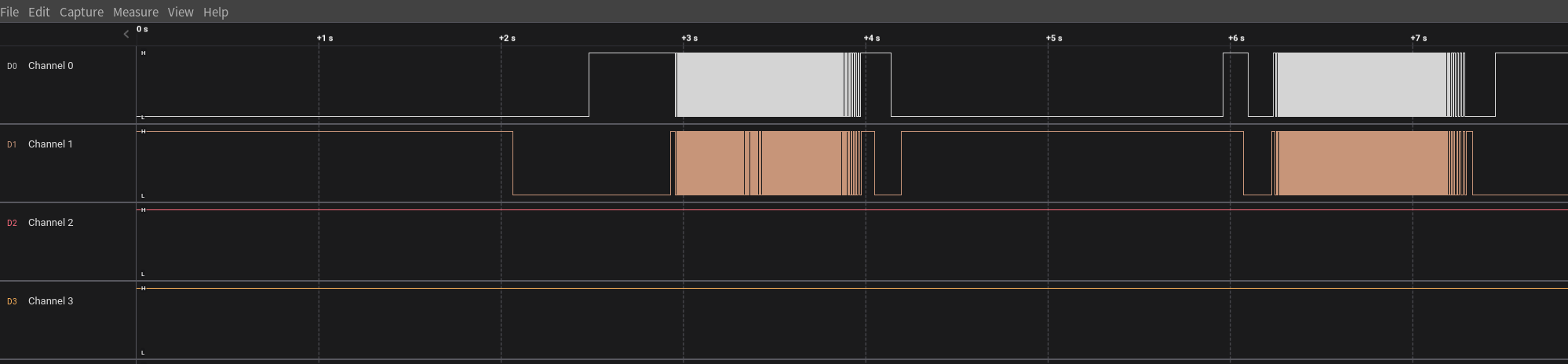
为了更加直观也分别用逻辑分析仪测量了两段轮子正转和反转时,AB编码器上电平的变化。
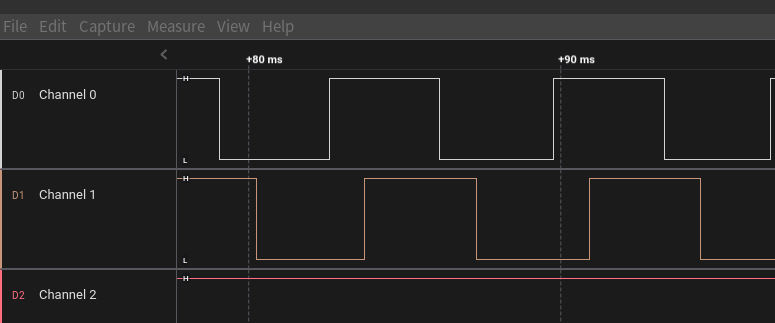
放大正转时,当A(通道0)电平为高电平后(A摄像头先看到了汽车),过了一段时间B(通道1)才变为高电平(B摄像头看到了汽车)。
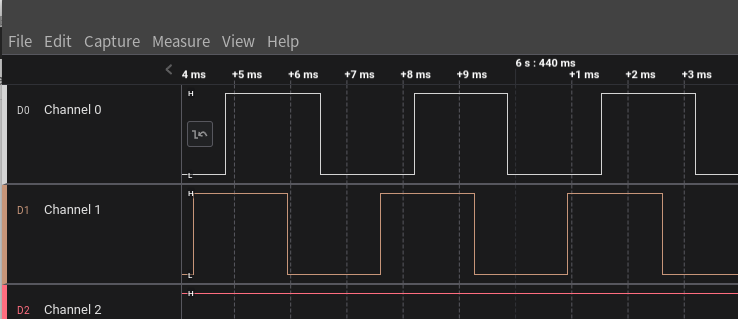
放大反转部分,当A(通道0)电平为高电平后(A摄像头看到了汽车),在A之前B(通道1)已经为高电平了(B摄像头先看到了汽车)。
所以在代码中我们可以检测到当A通道从低电平变成高电平时,B通道的电平值,如果为低则表示正转,为高则表示反转。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号