
ros microros 超声波雷达工作原理
1.简易雷达原理介绍
我们所说的雷达是一种测距设备,比如FishBot上搭载的雷达就可以实现360度的旋转测距——测量指定角度前方障碍物的距离。
所以要实现一个简易雷达,我们必须要有一个可以测量距离的传感器,一个可以指定角度的电机。
一、测距传感器超声波
超声波传感器是将超声波信号转换成其它能量信号(通常是电信号)的传感器。超声波是振动频率高于20kHz的机械波。它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中。超声波碰到杂质或分界面会产生显著反射形成反射回波,碰到活动物体能产生多普勒效应。超声波传感器广泛应用在工业、国防、生物医学等方面。
接着看看长什么样子:

便宜的就长这样子,一共两个头,一个头用于发送波,一个头接收波。
那么超声波传感器原理是什么呢?
距离=(发送时间-接收时间)*速度/2
下一节我们将通过代码根据这一原理进行距离测量测试。
二、常用执行器舵机
舵机是可以根据指定角度进行旋转的特殊电机。
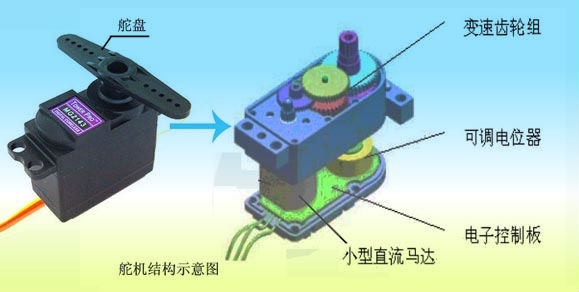
其硬件结构如上图所示,当我们把角度信息发送到控制板时,控制板通过电位器测量出当前的角度,然后根据当前角度和目标角度的角度差控制电机旋转,直到角度差变的几乎为零。
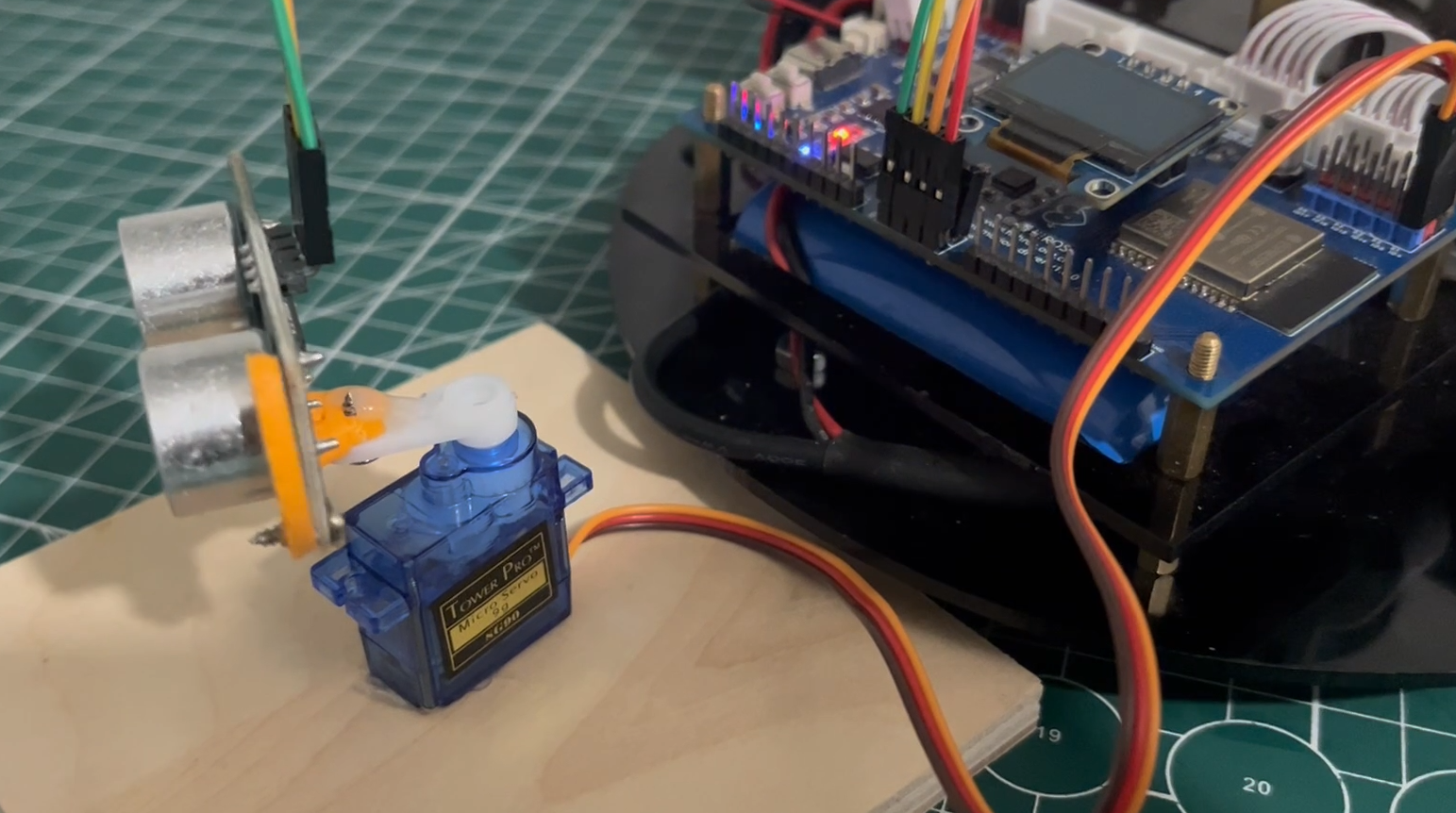
三、结构设计
主控板依然使用MicroROS学习板,

 浙公网安备 33010602011771号
浙公网安备 33010602011771号