

Ros Slam 地图加载
1.地图文件介绍
1.地图数据文件.pgm介绍
OccupancyGrid由一个.yaml格式的元数据文件,和.pgm图片格式的地图数据文件组成。从上节课建图后保存的文件也可以看出。
. ├── fishbot_map.pgm └── fishbot_map.yaml 0 directories, 2 files
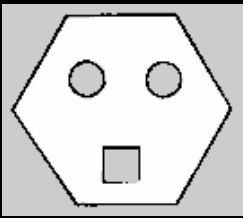
打开上节课建好的地图,观察下,你应该会有几点疑问:
不是说占据栅格地图每个栅格都有一个概率吗?为什么看不出来?
立方体内和圆柱体内和墙之外的区域为什么是灰色的?
原因如下:
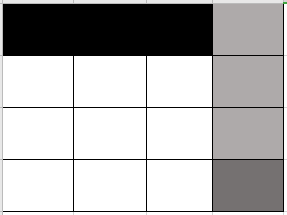
一个栅格对应到图片上其实是一个像素,每一个像素的值在0-255之间,所以将像素值和占据率之间的映射即可,而像素值反应到图像上就是颜色的深浅,1.2图对应的像素颜色如下:
建图的时候物体内和墙之外的区域机器人并没有探索到,没有数据参考就认为其值是未知的。
2.地图描述文件.yaml介绍
除了fishbot_map.pgm文件外,还有另外一个fishbot_map.yaml的文件,fishbot_map.yaml文件是地图的配置文件,该文件内容如下:
image: fishbot_map.pgm mode: trinary resolution: 0.05 origin: [-3.37, -2.88, 0] negate: 0 occupied_thresh: 0.65 free_thresh: 0.25
image:图像名称
mode:图像模式,默认为trinary(三进制),还有另外两个可选项scale(缩放的)和raw(原本的值)。
resolution:分辨率,一个栅格对应的物理尺寸,单位为m。0.05则表示一个栅格为0.05m
origin:地图原点位置,单位是m。
negate:是否反转图像
cooupied_thresh:占据阈值
free_thresh:空闲阈值
如何在地图上找出机器人原点的像素位置?
图像的像素原点在左下角。
这张图左边的0,0是地图原点,右边的图是图像的像素原点
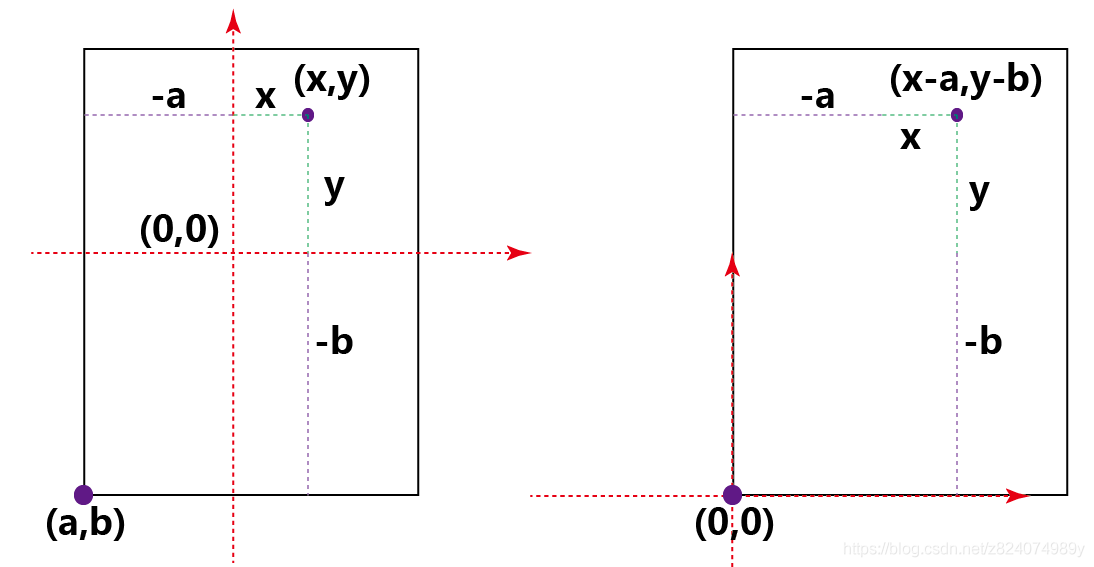
假如机器人地图原点是[-3.37m, -2.88m],除上分辨率则可得到像素原点[-67.4px,-57.6px]。地图原点在x和y轴分别偏移[-67.4px,-57.6px]就到了像素原点,反过来说,地图原点就在像素原点的[67.4px,57.6px]处。
3.地图加载
3.1 启动地图
了解完地图的格式和描述文件,接着我们看看如何将地图加载到rviz2中进行显示。我们使用nav2_map_server进行地图的保存,也可以使用它来加载地图。
打开终端,进入src/map/运行下面指令:
ros2 run nav2_map_server map_server --ros-args --param yaml_filename:=fishbot_map.yaml
其中--ros-args --param yaml_filename:=fishbot_map.yaml指定地图描述文件名称.fishbot_map.yaml。
3.2 打开rviz2
打开终端
rviz2
通过add->bytopic->选择map组件。此时你应该什么都看不到,没关系,这是正常的。
3.3 配置并激活map_server
map_server节点采用的是ROS2的生命周期进行编写的,除了启动节点,我们还需要手动的配置和激活节点才能使用。
打开新的终端,使用下面指令进行配置:
ros2 lifecycle set /map_server configure
使用下面的指令进行激活:
ros2 lifecycle set /map_server activate
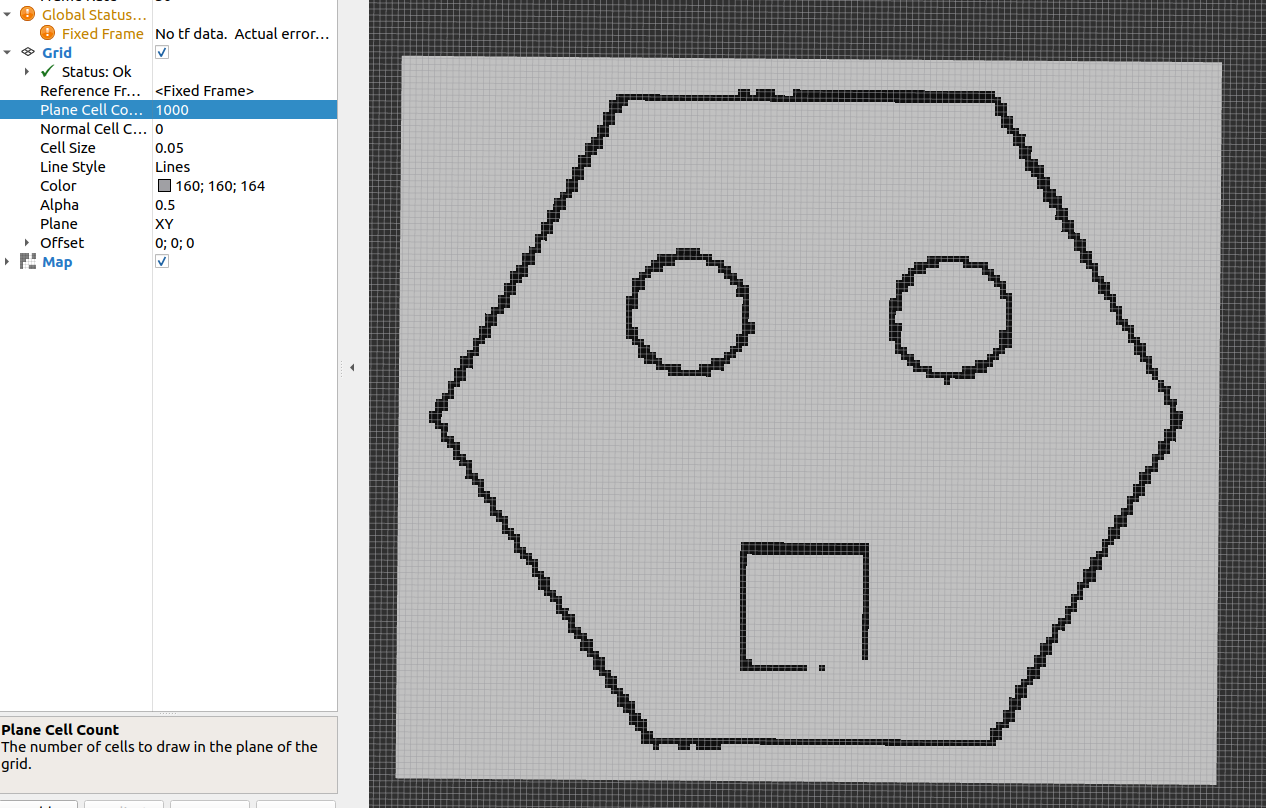
完成这一步,你应该就可以在rviz2中看到地图了。
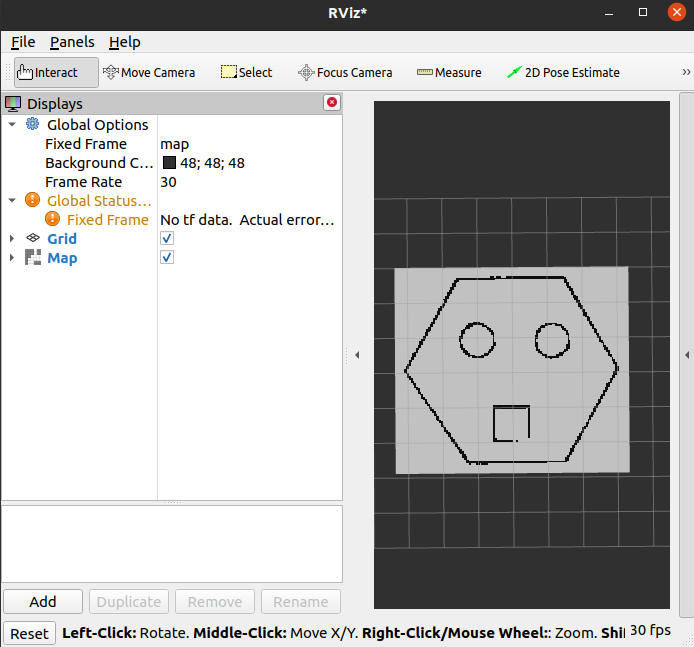
将栅格数量改大,然后将Grid的cellsize改成0.05,你就可以看到我们之间建立的地图每一个栅格的占据情况了。
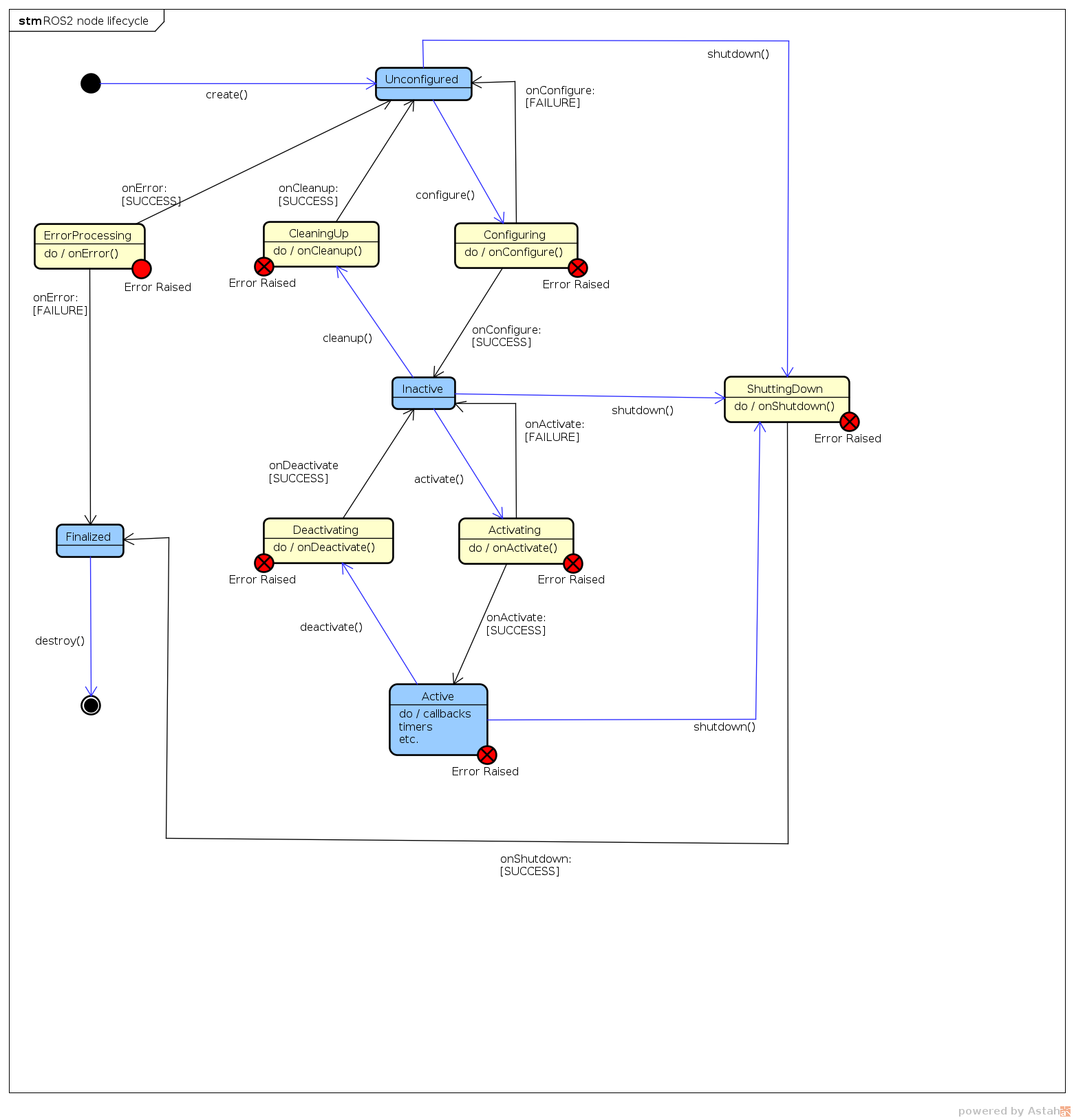
生命周期节点转换图如下:
4.地图编辑
最后我们来说一下如何对地图进行编辑,地图编辑的方法有很多,你可以手动改图片,也可以通过opencv等图像处理库进行图像的去除噪点等操作。
这里介绍的是手动添加一个地图用PS进行编辑 。
打开网址:https://www.gaituya.com/ps/
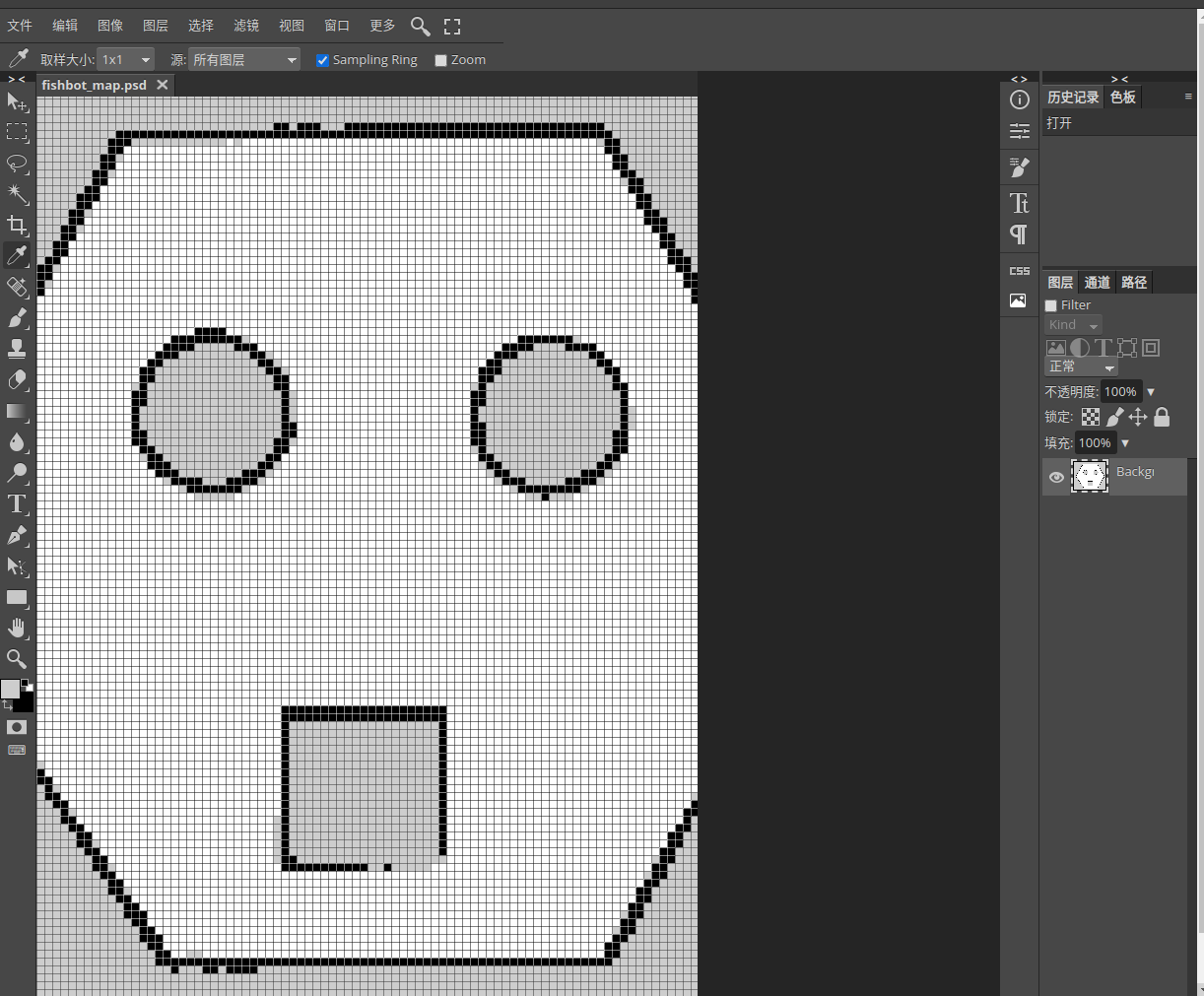
接着点击文件打开选择我们的.pgm文件,即可看到下图。
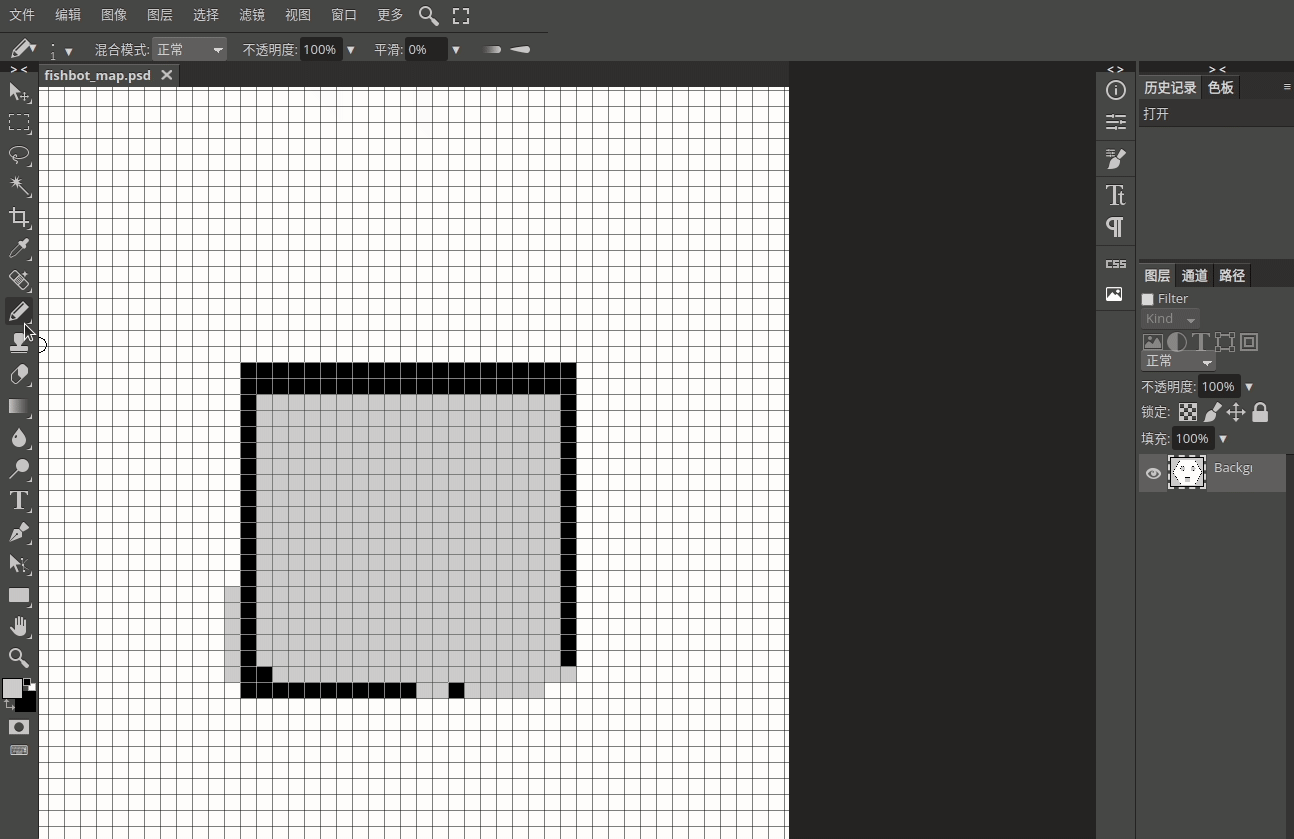
接着将下面的正方形给补上。
保存后在文件选择导出为png格式即可,因为PS并不支持pgm格式的导出,所以我们选择png格式,幸运的是png格式的地图也是被map_server所支持的。
把导出的图片放到map文件夹下,接着我们需要修改下yaml配置文件中图片的后缀。
image: fishbot_map.png mode: trinary resolution: 0.05 origin: [-3.37, -2.88, 0] negate: 0 occupied_thresh: 0.65 free_thresh: 0.25
接着你可以重新运行下map_server(记得先关闭rviz2),然后看一下map是否发生了改变。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App