
Ros Slam 之Cartographer介绍
Cartographer是Google开源的一个可跨多个平台和传感器配置以2D和3D形式提供实时同时定位和建图(SLAM)的系统。
github地址:https://github.com/cartographer-project/cartographer 文档地址:https://google-cartographer.readthedocs.io/en/latest
在机器人公司里,建图最终方案大都是采用了Cartographer,甚至花费大量人力物力对Cartographer算法进行裁剪,这足以表明Cartographer算法的优越性。
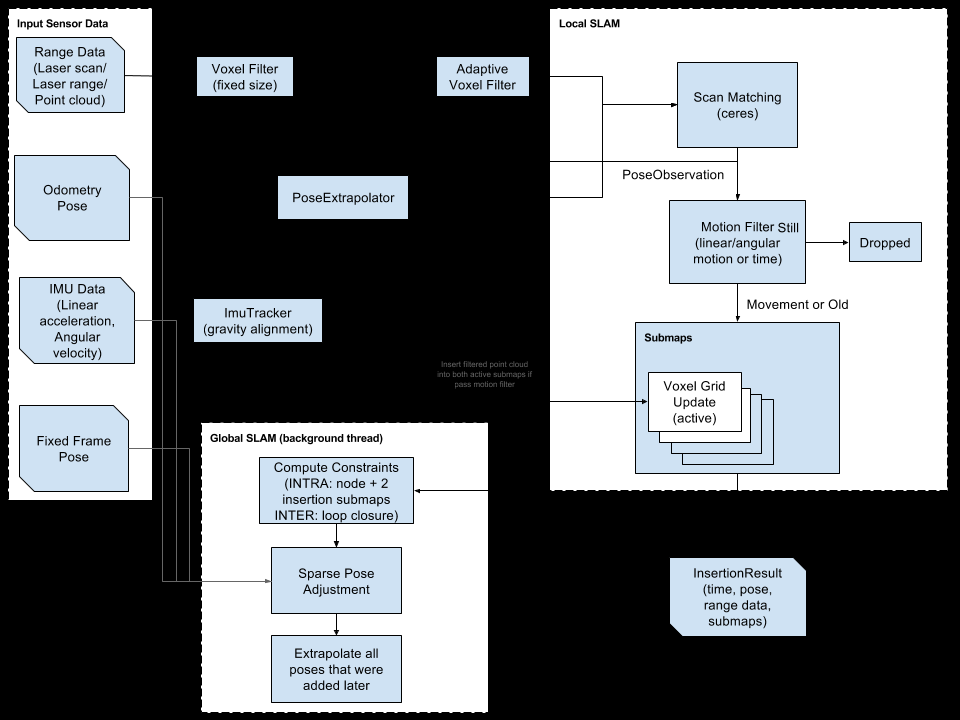
Cartographer系统架构概述(简单看看即可,如果大家后面确定研究方向是SLAM可以深入学习):
简单的可以看到左边的可选的输入有深度信息、里程计信息、IMU数据、固定Frame姿态。
2.Carttographer安装
2.1 apt安装
安装carotgrapher
sudo apt install ros-humble-cartographer
需要注意我们不是直接使用cartographer,而是通过cartographer-ros功能包进行相关操作,所以我们还需要安装下cartographer-ros
sudo apt install ros-humble-cartographer-ros
2.2 源码安装
比较推荐源码安装的方式,毕竟是以学习为目的,我们后面要稍微看一下源码。
将下面的源码克隆到fishbot_ws的src目录下:
git clone https://ghproxy.com/https://github.com/ros2/cartographer.git -b ros2 git clone https://ghproxy.com/https://github.com/ros2/cartographer_ros.git -b ros2
安装依赖
这里我们使用rosdepc进行依赖的安装,rosdepc指令找不到可以先运行下面的一键安装命令,选择一键配置rosdep即可。
wget http://fishros.com/install -O fishros && . fishros
接着在fishbot_ws下运行下面这个命令进行依赖的安装。
rosdepc 是小鱼制作的国内版rosdep,是一个用于安装依赖的工具。该工具的安装可以采用一键安装进行,选项编号为3。安装完成后运行一次rodepc update即可使用。
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
编译
这里有一个新的命令--packages-up-to,意思是其所有依赖后再编译该包
colcon build --packages-up-to cartographer_ros
2.3 测试是否安装成功
如果是源码编译请先source下工作空间后再使用下面指令查看是否安装成功;
ros2 pkg list | grep cartographer
能看到下面的结果即可
cartographer_ros
cartographer_ros_msgs
可能你会好奇为什么没有cartographer,因为cartographer包的编译类型原因造成的,不过没关系,cartographer_ros依赖于cartographer,所以有cartographer_ros一定有cartographer。
3.Cartographer参数配置
作为一个优秀的开源库,Cartographer提供了很多可以配置的参数,虽然灵活性提高了,但同时也提高了使用难度(需要对参数进行调节配置),所以有必要在正式使用前对参数进行基本的介绍。
因为我们主要使用其进行2D的建图定位,所以我们只需要关注2D相关的参数。
Cartographer参数是使用lua文件来描述的,不会lua也没关系,我们只是改改参数而已。
小鱼提示:lua中的注释采用 -- 开头
键入以搜索
动手学ROS2
(一)ROS2入门篇
(二)机器人学篇
(三)建模仿真篇
(四)Nav2导航篇
第 10 章 SLAM建图
章节导读
基础篇-图像基础
入门篇-SLAM建图
1.SLAM前世今生
2.Carto介绍及安装
1.Cartographer介绍
2.Carttographer安装
2.1 apt安装
2.2 源码安装
2.3 测试是否安装成功
3.Cartographer参数配置
4.总结
3.配置FishBot进行建图
进阶篇-Carto与地图
第 11 章 Nav2导航仿真实战
第 12 章 Nav2进阶实践
(五)ROS2硬件控制篇
(六)FishBot移动机器人开发篇
(七)Moveit2机械臂篇
ROS 2常用代码模板
2. Cartographer介绍与安装
1.Cartographer介绍
cartographer
Cartographer是Google开源的一个可跨多个平台和传感器配置以2D和3D形式提供实时同时定位和建图(SLAM)的系统。
github地址:https://github.com/cartographer-project/cartographer 文档地址:https://google-cartographer.readthedocs.io/en/latest
在小鱼呆过的机器人公司里,建图最终方案都是采用了Cartographer,甚至花费大量人力物力对Cartographer算法进行裁剪,这足以表明Cartographer算法的优越性。
Cartographer系统架构概述(简单看看即可,如果大家后面确定研究方向是SLAM可以深入学习):
简单的可以看到左边的可选的输入有深度信息、里程计信息、IMU数据、固定Frame姿态。
系统概述
2.Carttographer安装
2.1 apt安装
安装carotgrapher
sudo apt install ros-humble-cartographer
Copy to clipboardErrorCopied
解释
需要注意我们不是直接使用cartographer,而是通过cartographer-ros功能包进行相关操作,所以我们还需要安装下cartographer-ros
sudo apt install ros-humble-cartographer-ros
Copy to clipboardErrorCopied
解释
2.2 源码安装
小鱼比较推荐源码安装的方式,毕竟是以学习为目的,我们后面要稍微看一下源码。
将下面的源码克隆到fishbot_ws的src目录下:
git clone https://ghproxy.com/https://github.com/ros2/cartographer.git -b ros2
git clone https://ghproxy.com/https://github.com/ros2/cartographer_ros.git -b ros2
Copy to clipboardErrorCopied
解释
安装依赖
这里我们使用rosdepc进行依赖的安装,rosdepc指令找不到可以先运行下面的一键安装命令,选择一键配置rosdep即可。
wget http://fishros.com/install -O fishros && . fishros
Copy to clipboardErrorCopied
解释
接着在fishbot_ws下运行下面这个命令进行依赖的安装。
rosdepc 是小鱼制作的国内版rosdep,是一个用于安装依赖的工具。该工具的安装可以采用一键安装进行,选项编号为3。安装完成后运行一次rodepc update即可使用。
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
Copy to clipboardErrorCopied
解释
编译
这里有一个新的命令--packages-up-to,意思是其所有依赖后再编译该包
colcon build --packages-up-to cartographer_ros
Copy to clipboardErrorCopied
解释
2.3 测试是否安装成功
如果是源码编译请先source下工作空间后再使用下面指令查看是否安装成功;
ros2 pkg list | grep cartographer
Copy to clipboardErrorCopied
解释
能看到下面的结果即可
cartographer_ros
cartographer_ros_msgs
Copy to clipboardErrorCopied
解释
可能你会好奇为什么没有cartographer,因为cartographer包的编译类型原因造成的,不过没关系,cartographer_ros依赖于cartographer,所以有cartographer_ros一定有cartographer。
3.Cartographer参数配置
作为一个优秀的开源库,Cartographer提供了很多可以配置的参数,虽然灵活性提高了,但同时也提高了使用难度(需要对参数进行调节配置),所以有必要在正式使用前对参数进行基本的介绍。
因为我们主要使用其进行2D的建图定位,所以我们只需要关注2D相关的参数。
Cartographer参数是使用lua文件来描述的,不会lua也没关系,我们只是改改参数而已。
小鱼提示:lua中的注释采用 -- 开头
3.1 前端参数
文件:trajectory_builder_2d
src/cartographer/configuration_files/trajectory_builder_2d.lua
请你打开这个文件自行浏览,小鱼对其中我们可能会在初次建图配置的参数进行介绍。
-- 是否使用IMU数据 use_imu_data = true, -- 深度数据最小范围 min_range = 0., -- 深度数据最大范围 max_range = 30., -- 传感器数据超出有效范围最大值时,按此值来处理 missing_data_ray_length = 5., -- 是否使用实时回环检测来进行前端的扫描匹配 use_online_correlative_scan_matching = true -- 运动过滤,检测运动变化,避免机器人静止时插入数据 motion_filter.max_angle_radians
3.2 后端参数
文件:pose_graph.lua-后端参数配置项
路径src/cartographer/configuration_files/pose_graph.lua
该文件主要和地图构建
--Fast csm的最低分数,高于此分数才进行优化。 constraint_builder.min_score = 0.65 --全局定位最小分数,低于此分数则认为目前全局定位不准确 constraint_builder.global_localization_min_score = 0.7
3.3 Carotgrapher_ROS参数配置
该部分参数主要是用于和ROS2进行通信和数据收发的配置,比如配置从哪个话题读取里程记数据,从哪个话题来获取深度信息(雷达)。
文件:backpack_2d.lua
路径:src/cartographer_ros/cartographer_ros/configuration_files/backpack_2d.lua
include "map_builder.lua" include "trajectory_builder.lua" options = { map_builder = MAP_BUILDER, trajectory_builder = TRAJECTORY_BUILDER, -- 用来发布子地图的ROS坐标系ID,位姿的父坐标系,通常是map。 map_frame = "map", -- SLAM算法跟随的坐标系ID tracking_frame = "base_link", -- 将发布map到published_frame之间的tf published_frame = "base_link", -- 位于“published_frame ”和“map_frame”之间,用来发布本地SLAM结果(非闭环),通常是“odom” odom_frame = "odom", -- 是否提供里程计 provide_odom_frame = true, -- 只发布二维位姿态(不包含俯仰角) publish_frame_projected_to_2d = false, -- 是否使用里程计数据 use_odometry = false, -- 是否使用GPS定位 use_nav_sat = false, -- 是否使用路标 use_landmarks = false, -- 订阅的laser scan topics的个数 num_laser_scans = 0, -- 订阅多回波技术laser scan topics的个数 num_multi_echo_laser_scans = 1, -- 分割雷达数据的个数 num_subdivisions_per_laser_scan = 10, -- 订阅的点云topics的个数 num_point_clouds = 0, -- 使用tf2查找变换的超时秒数 lookup_transform_timeout_sec = 0.2, -- 发布submap的周期间隔 submap_publish_period_sec = 0.3, -- 发布姿态的周期间隔 pose_publish_period_sec = 5e-3, -- 轨迹发布周期间隔 trajectory_publish_period_sec = 30e-3, -- 测距仪的采样率 rangefinder_sampling_ratio = 1., --里程记数据采样率 odometry_sampling_ratio = 1., -- 固定的frame位姿采样率 fixed_frame_pose_sampling_ratio = 1., -- IMU数据采样率 imu_sampling_ratio = 1., -- 路标采样率 landmarks_sampling_ratio = 1., }
4.总结
本节我们简单的介绍了Cartographer以及二进制和源码安装的方法,并对参数进行介绍。
下一节我们就开始为fishbot配置cartographer,接着就可以使用fishbot进行建图了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号