
FishBot上的电机
FishBot上采用的是一个额定电压12V的370减速电机,额定转速为130转/分、额定电流0.5A,转矩600克力厘米。
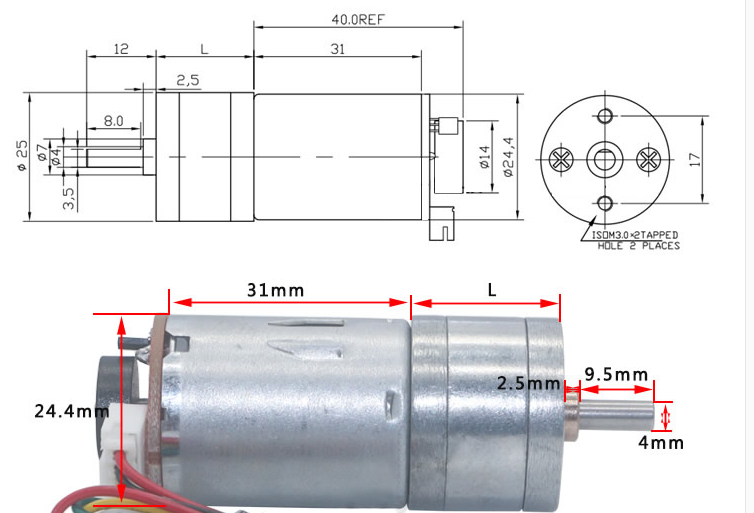
电机相信你很熟悉,那什么是减速电机呢?减速电机指的是带减速器的电机, 减速器的作用是将高转速低扭矩转化为低转速高扭矩。
电机一般由定子和转子组成的,一般转速都比较快,但输出的力矩比较小,所以我们会给电机配备减速器,让转速降低,提高力矩。
电机驱动原理:
H桥电路:
让电机动起来只需要通电就行,比如我们用的额定电压为12V 130RPM的电机,当给到12V的电压时可以达到额定转速130转/分,但如果我们给8V的电压,此时电机依然可以转动,但转速就相对较低。
只是转起来还不行,要想控制机器人前进后退,左转右转,我们还需要控制轮子的转的方向,想要控制转速我们则需要控制给到电机的电压。
H桥(H-Bridge)电路可以帮我们实现上面两个功能,之所以叫H桥,因为这个电路长的像H。通过该电路可以将电源电压正向或反向地施加到电动机上,从而实现正向、反向转动和制动等功能。
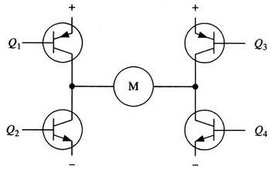
该电路由四个独立开关管(MOSFET)组成,在H桥电路中,两个开关管组成一对,如上图所示。当我们接通Q1和Q4,关闭Q3和Q2时,电源电压正向施加到电动机上,使其正向转动。
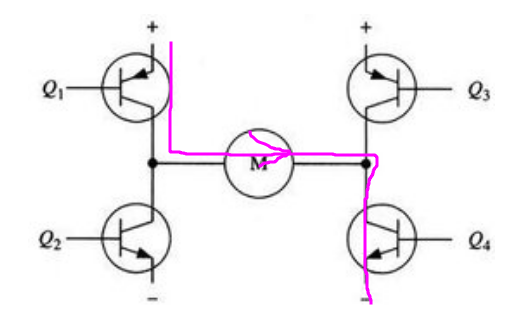
我们关闭Q1和Q4,接通Q2和Q3时,电源电压反向施加到电动机上,使其反向转动。
在制动时,同时关闭四个开关管,这样电动机会在短时间内停止转动。另外,通过之前介绍的在PWM(脉宽调制)控制下,可以通过改变开关管的开关时间比例,就可以实现电动机的速度控制。
看完H桥电路原理,我们来讲讲在FishBot主控板上如何搭载的该电路的。在开发板上我们采用了一款H桥电路芯片DRV8833来实现电机的驱动。
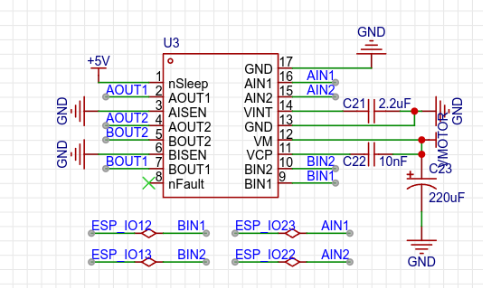
该电路原理图如上图所示,我们通过AIN1(IO23)的高低电平控制H桥中Q1和Q4的开关,通过AIN2(IO22)控制Q2和Q3的开关,所以我们在程序中通过控制AIN1和AIN2的高低电平变化就可以完成对电机正反转的控制。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号