
ROS Slame 编码器
在移动机器人中我们需要实时的获取到机器人各个轮子的转速,通过转速根据机器人的运动学模型将轮子的速度转换成机器人的速度,通过对速度进行积分(速度*距离)得到机器人行走的距离。
我们对轮子速度的测量所使用的传感器就是编码器,在FishBot上,我们采用的是AB电磁编码器。
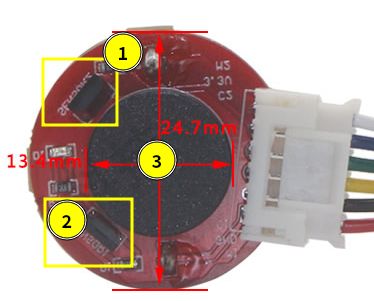
电磁编码器是由1和2两个霍尔传感器和圆形磁铁3共同组成的,该磁铁的磁性是间隔分布的,磁铁固定在电机的转子上,当电机转动时,带动磁铁转动,此时用于检测磁性的霍尔传感器就会检测到磁性的变化,从而就可以测量出电机在某段时间内转了多少圈即电机的转速。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号