
Ros Slam 雷达测距原理
一般激光雷达的测距原理是三角测距法:
单线激光雷达原理揭秘:三角测距 VS ToF测距-射频/微波
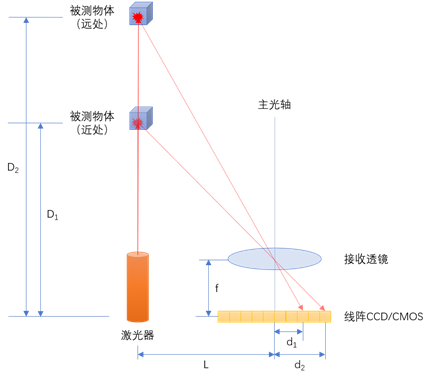
从上图可以看出,当我们已知L(机械安装值)和d1(CCS测量值)和f(机械安装值)的情况下,我们可以得到D1的值,即激光雷达到被测物体的距离:

激光头通过不断旋转,这样就可以测量出360度的深度信息。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号