

Ros - URDF- 三位模型导出
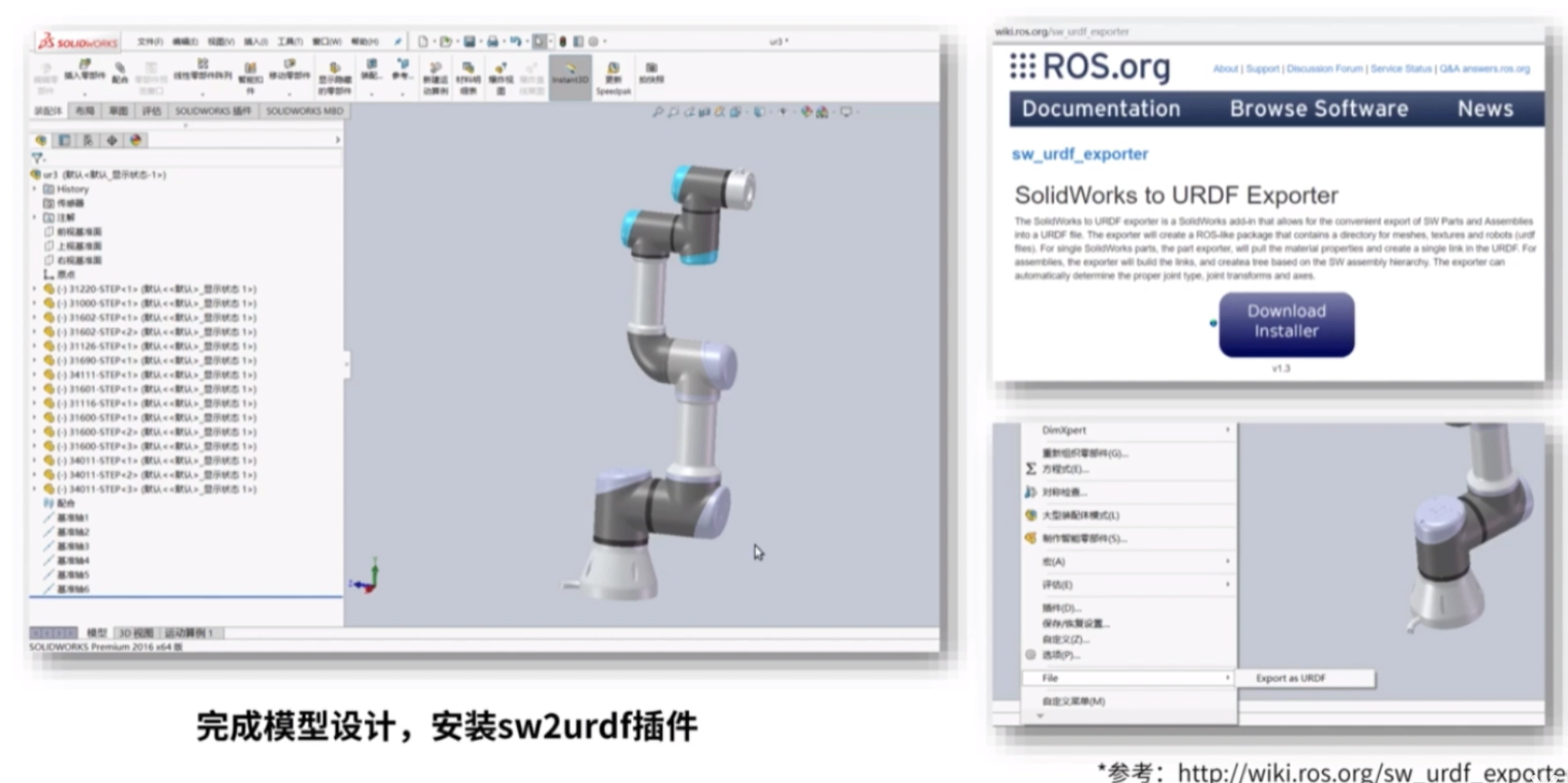
1. 以UR3机器人为例, 先设计solidwork模型, 下载并安装sw_urdf_expoter 插件:
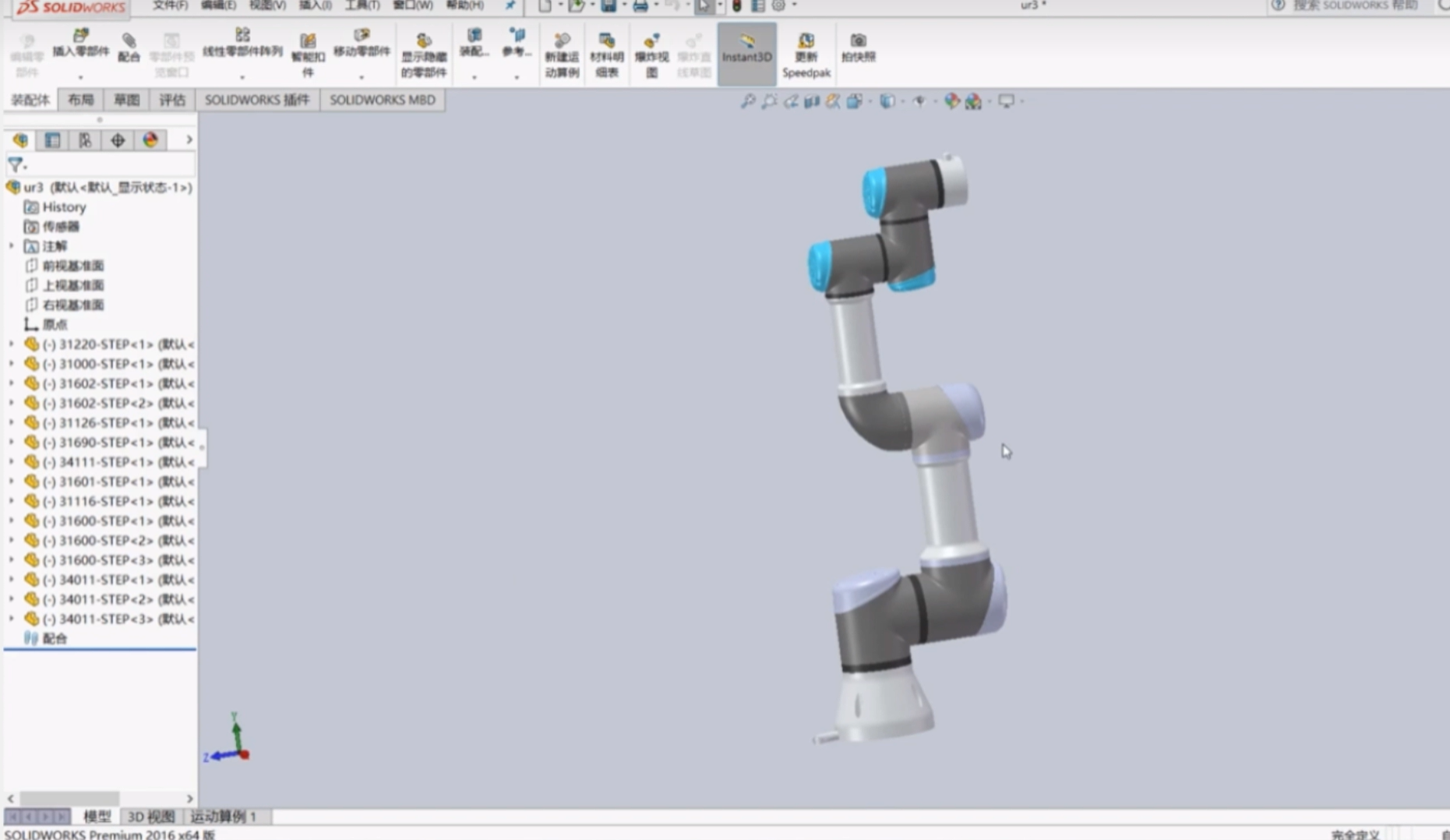
2. 下载机器人模型文件,加载进solidworks:
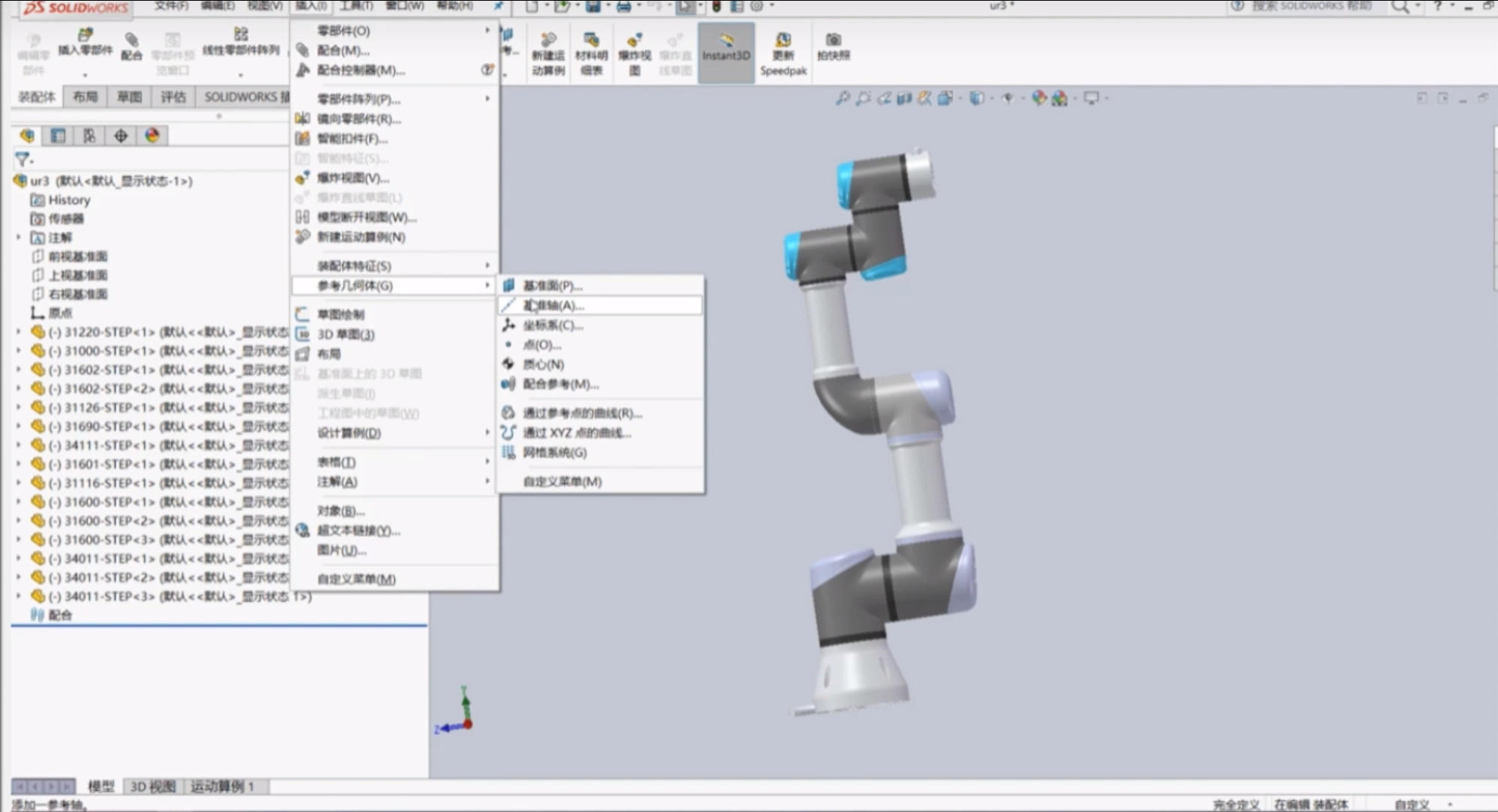
插入基准轴:
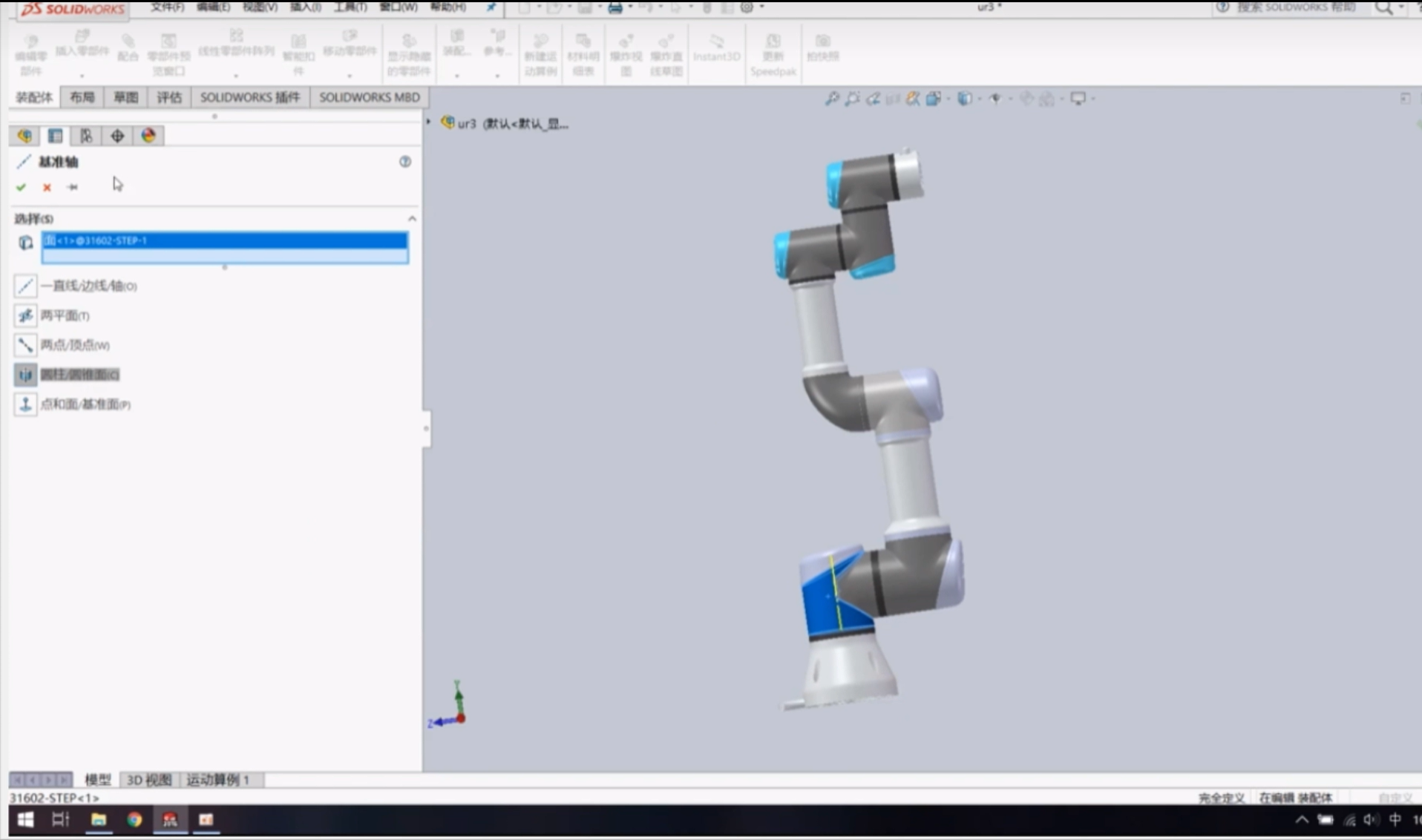
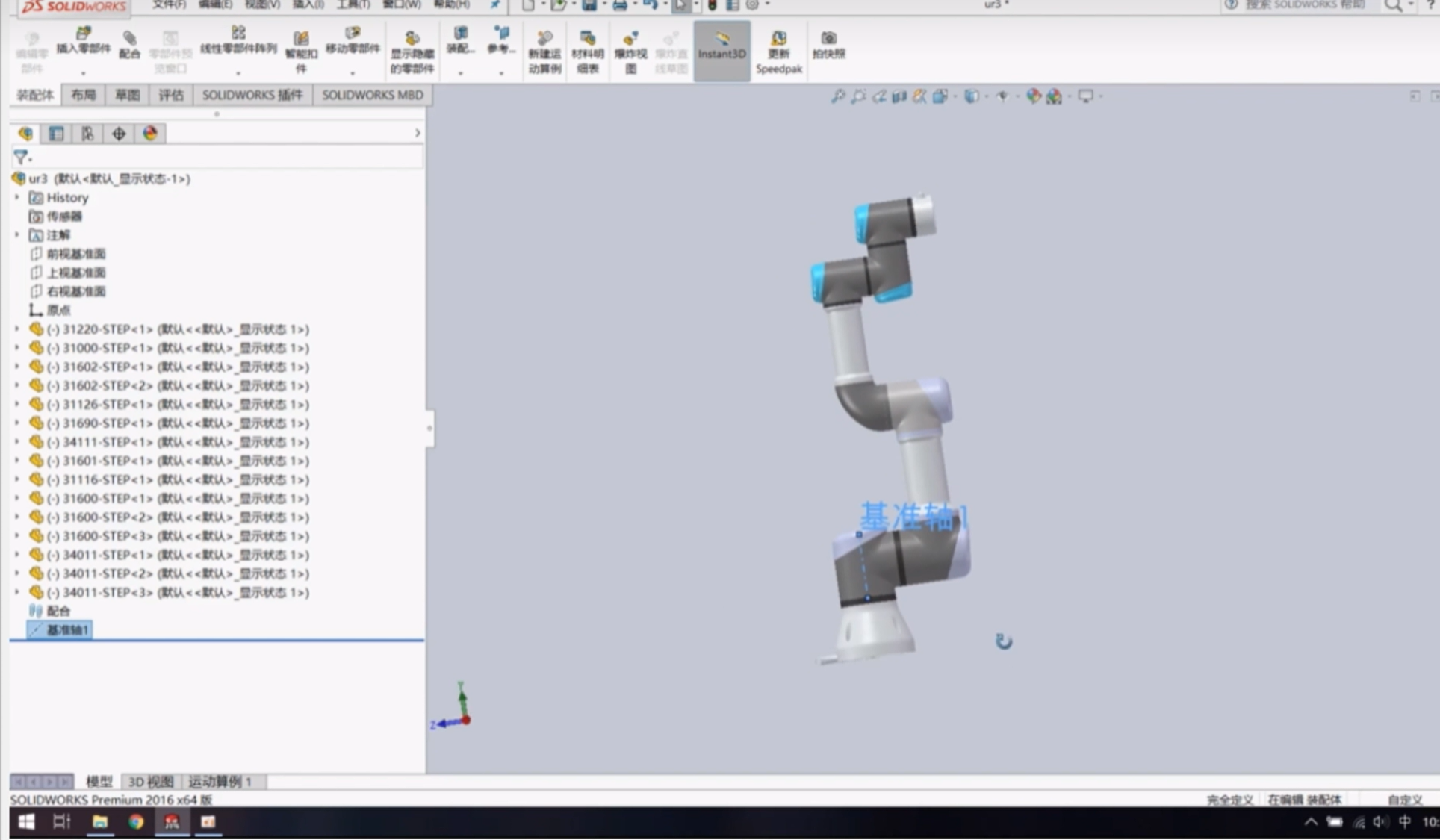
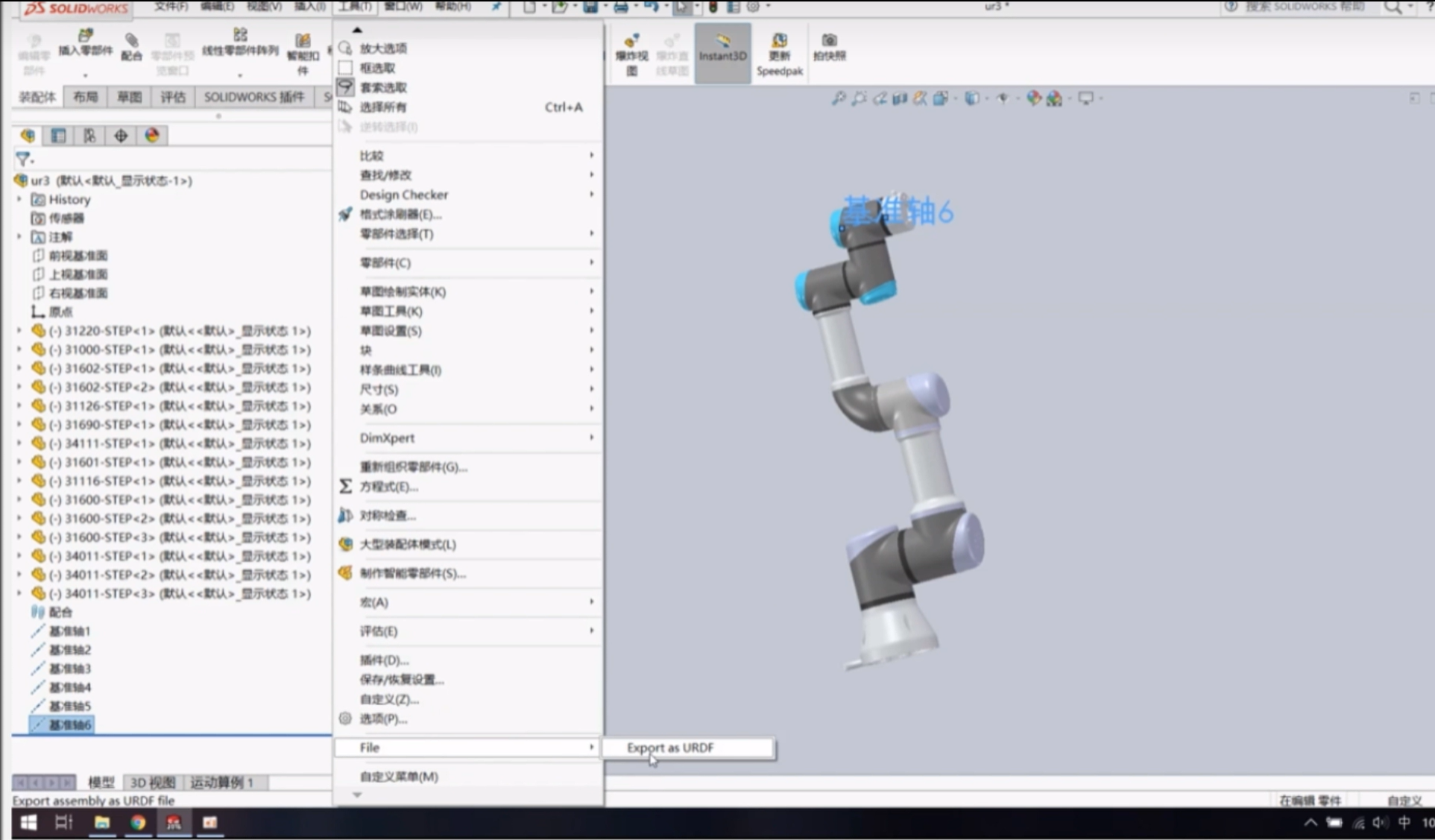
一共6个旋转轴:

设置好旋转轴后,接下来,导出URDF文件:
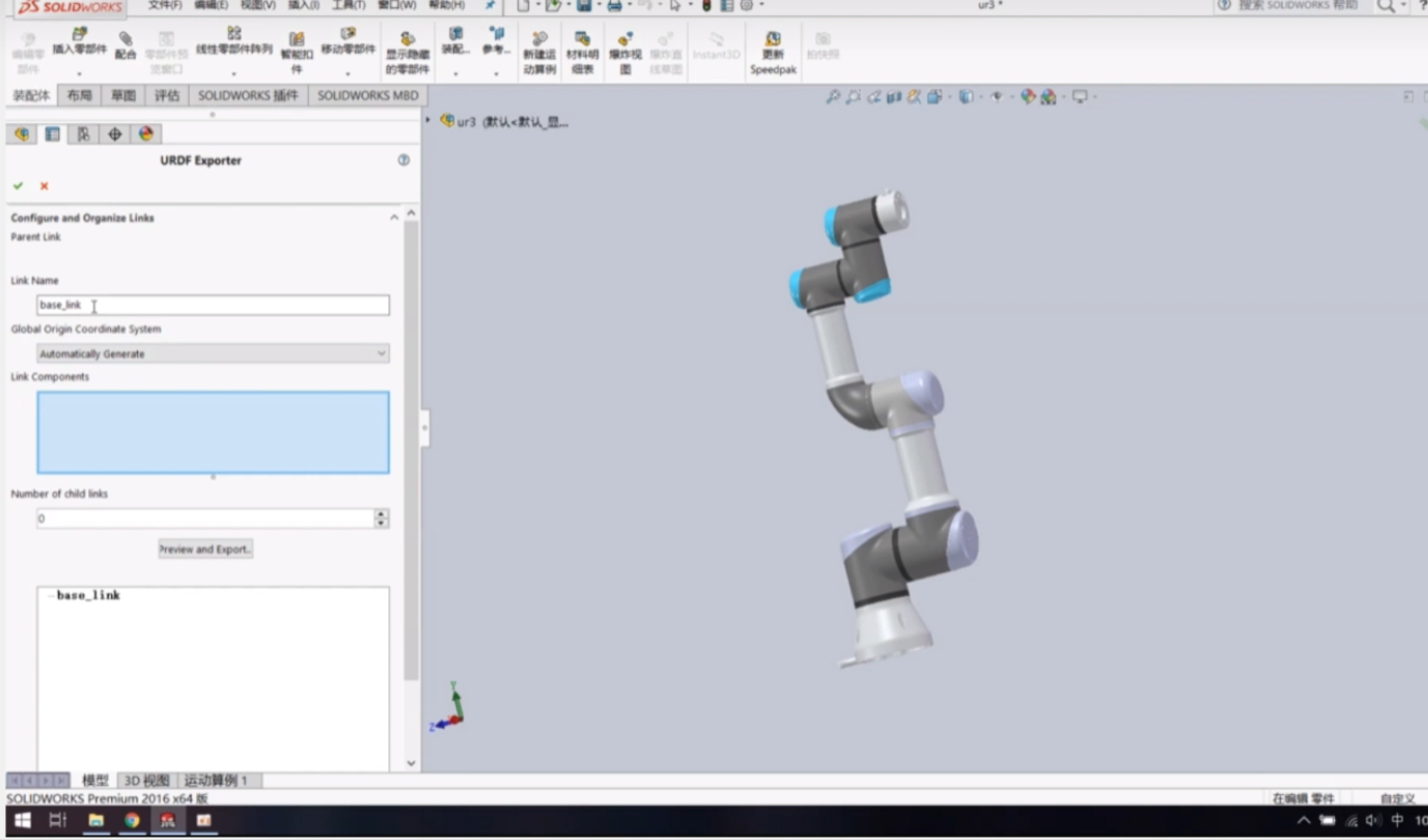
配置URDF:
将link加进来:
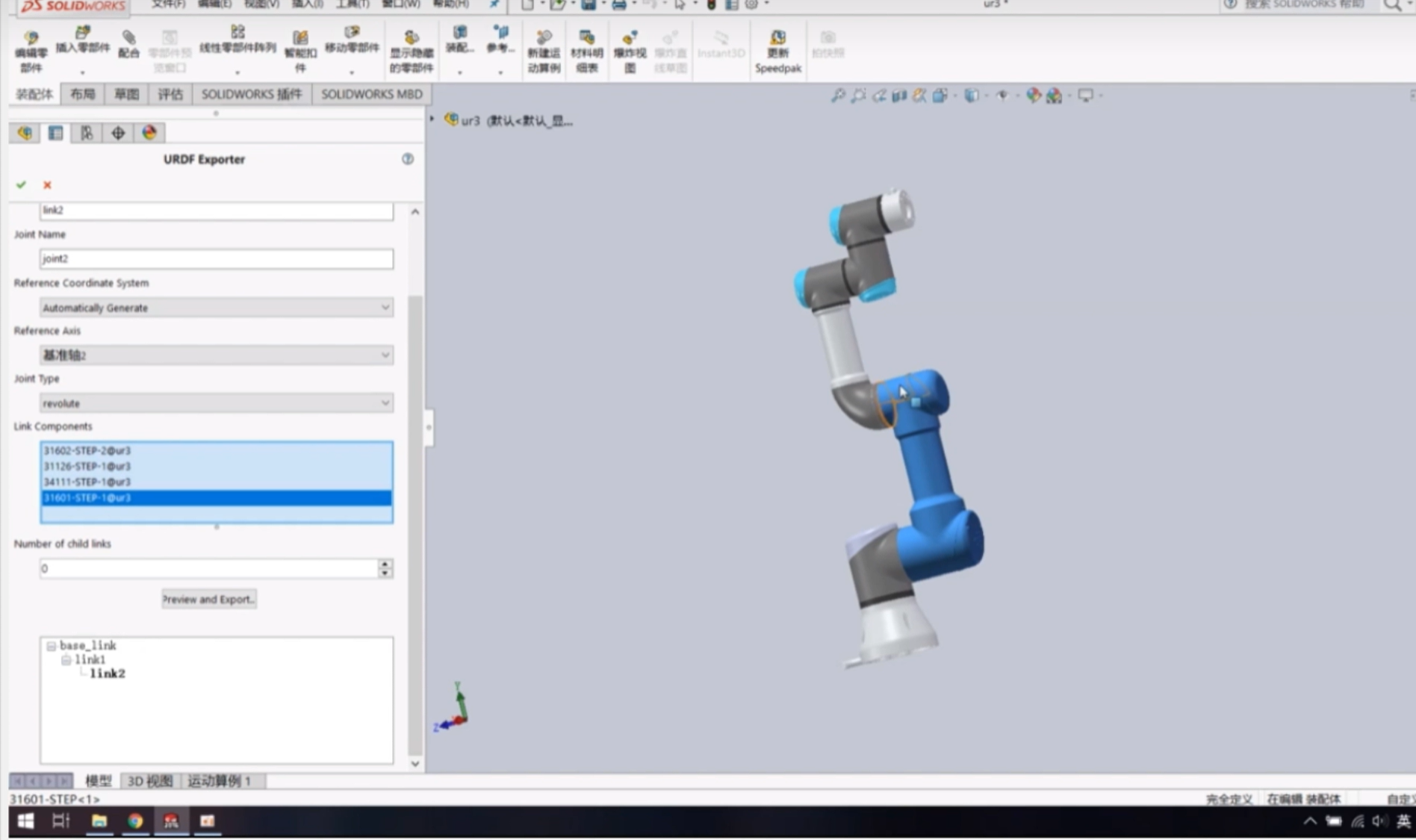
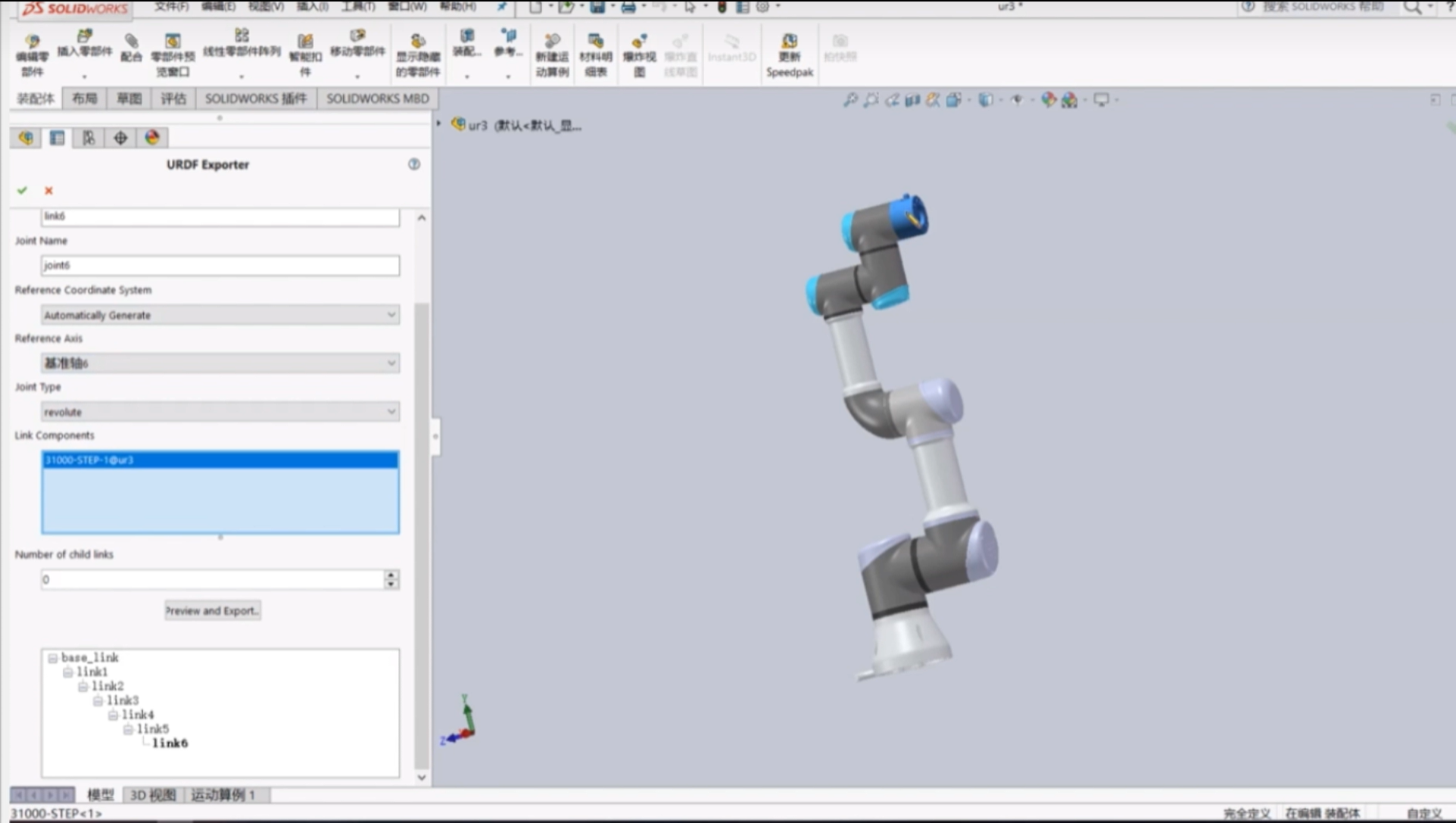
点击“Preview and Export”进行自动计算旋转轴与坐标系之间的关系,生成模型文件:
确认joint信息,设置限位: 基本单位 弧度 米

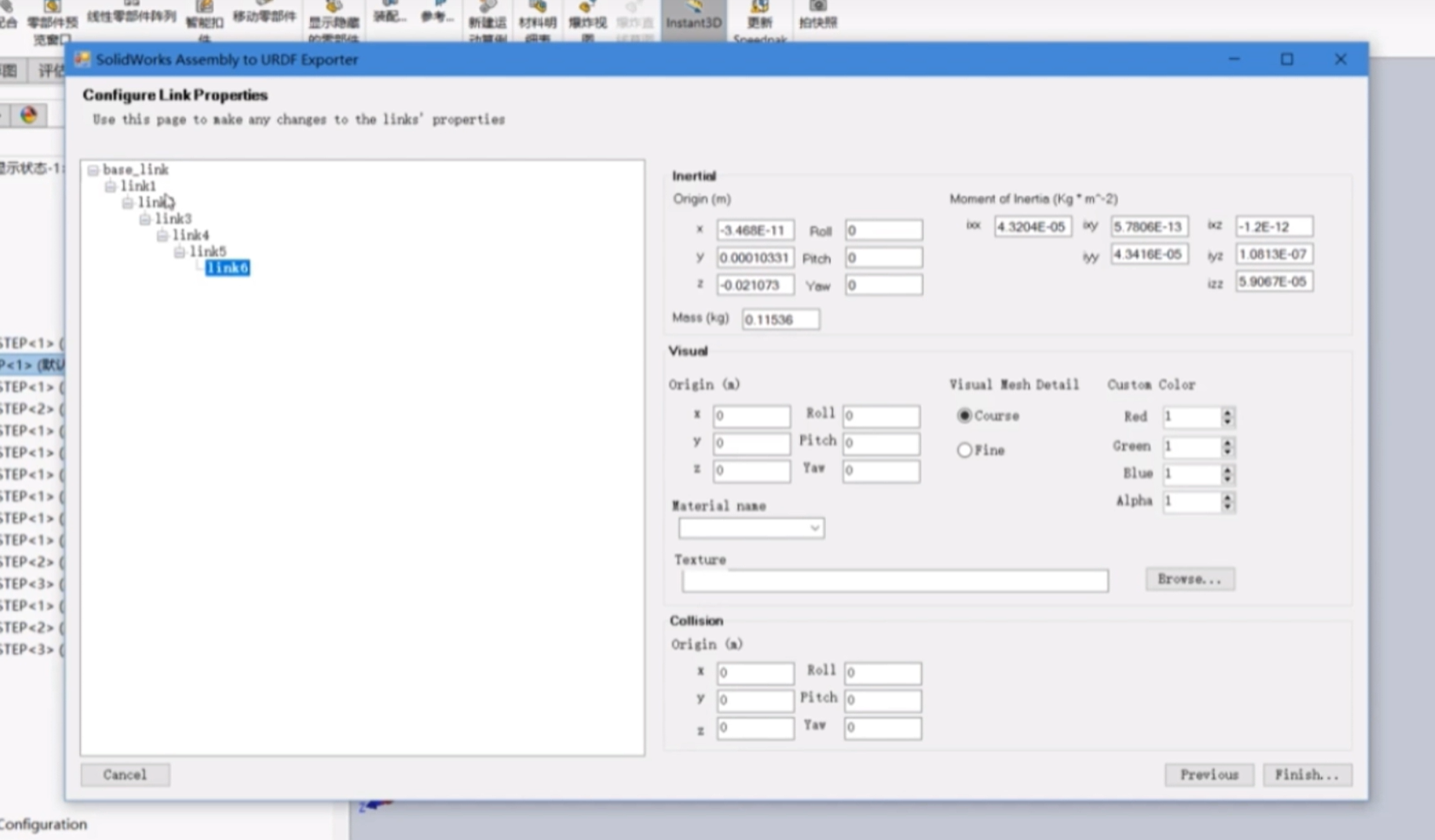
点 Next,确认Link信息:Solidworks可以自动计算质量,惯性矩阵等信息。
确认后, 点“Finish”, 弹出保存对话框:
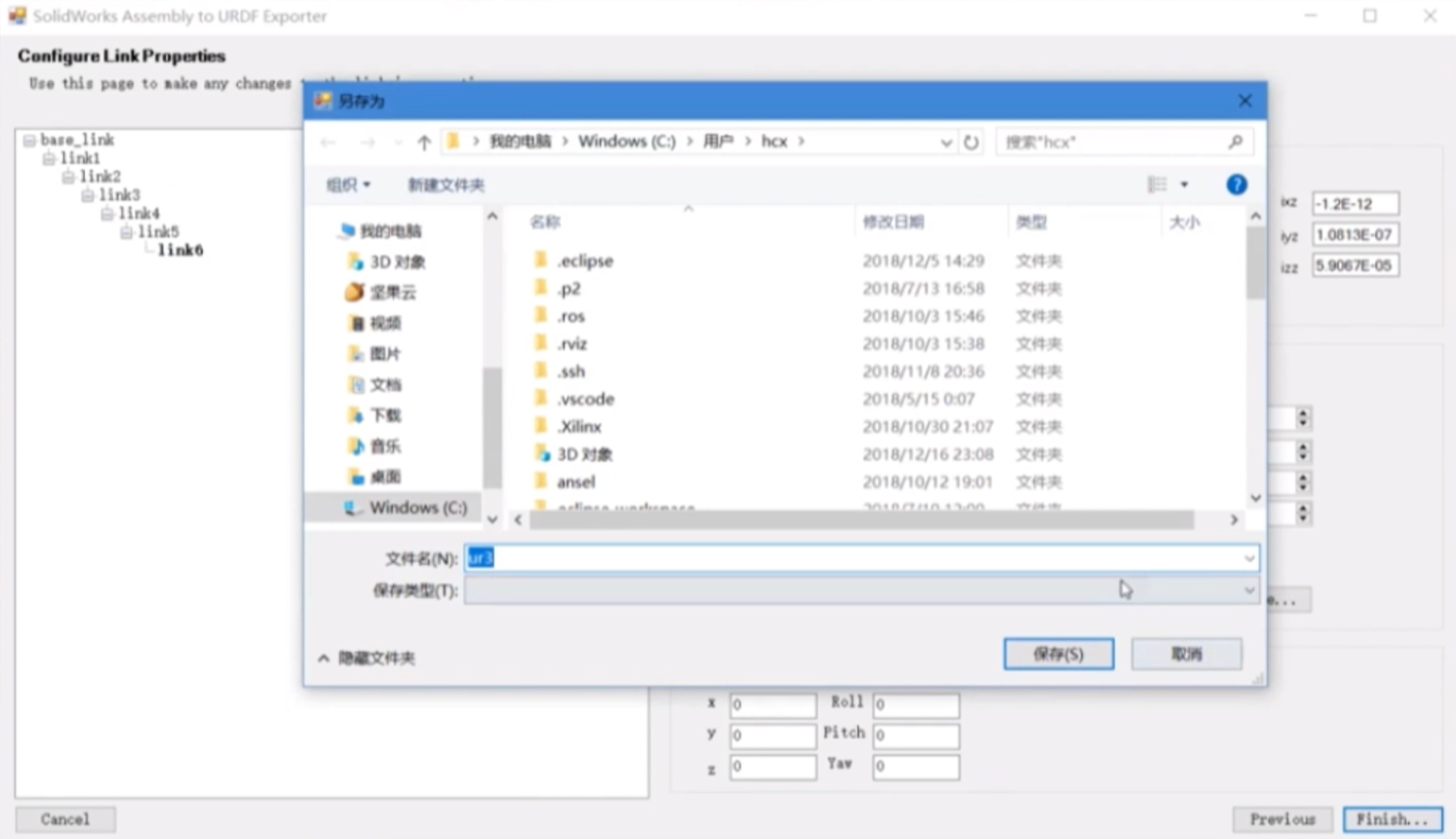
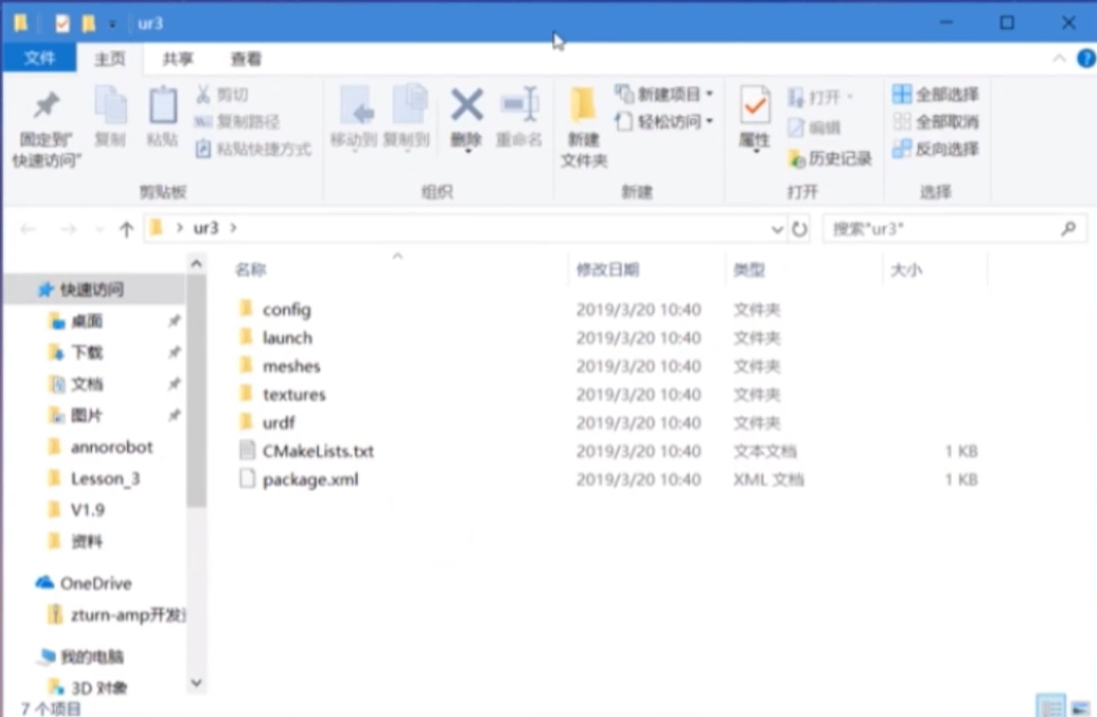
桌面上会产生ur3文件夹, 里面保存了保存的urdf文件:

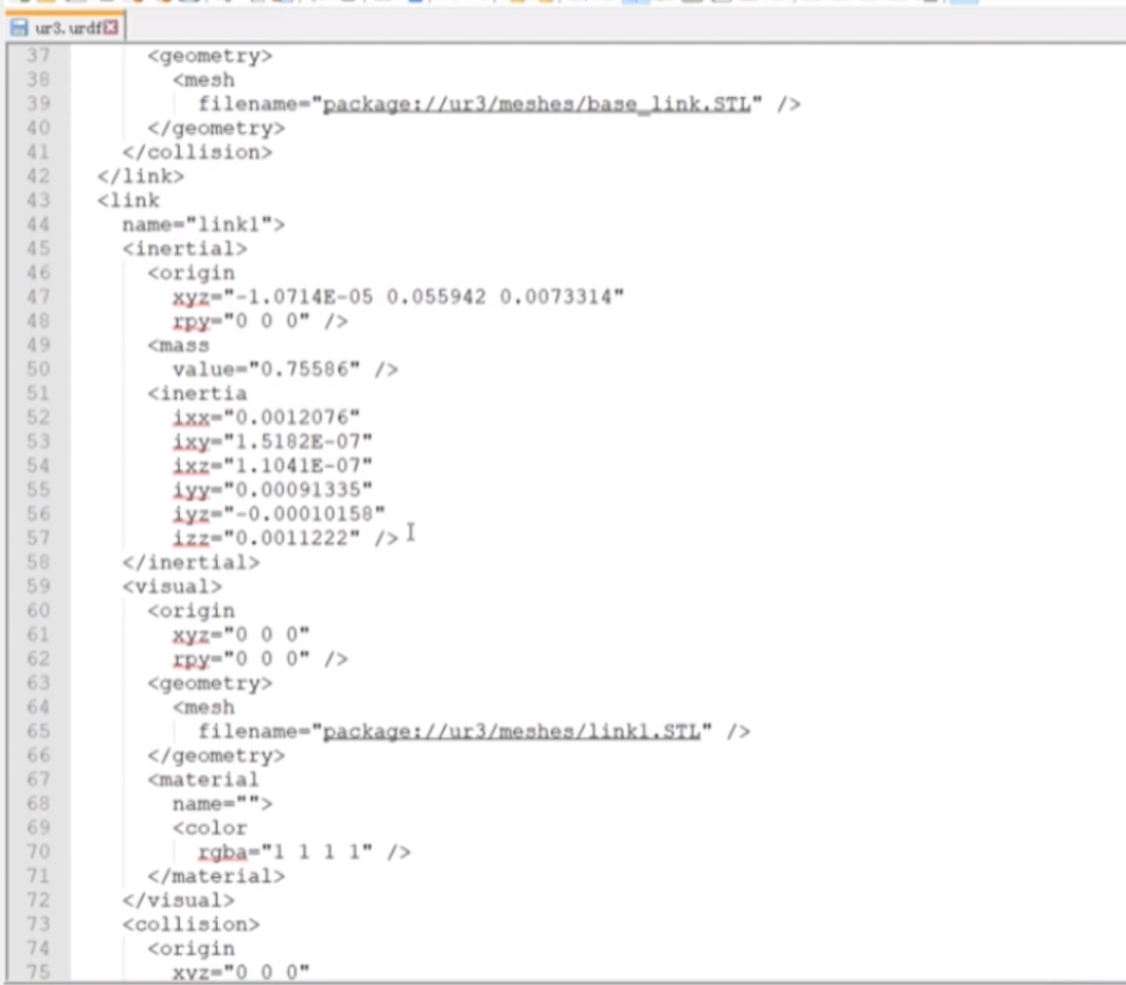
生成的模型文件,拷贝到ros工作目录:
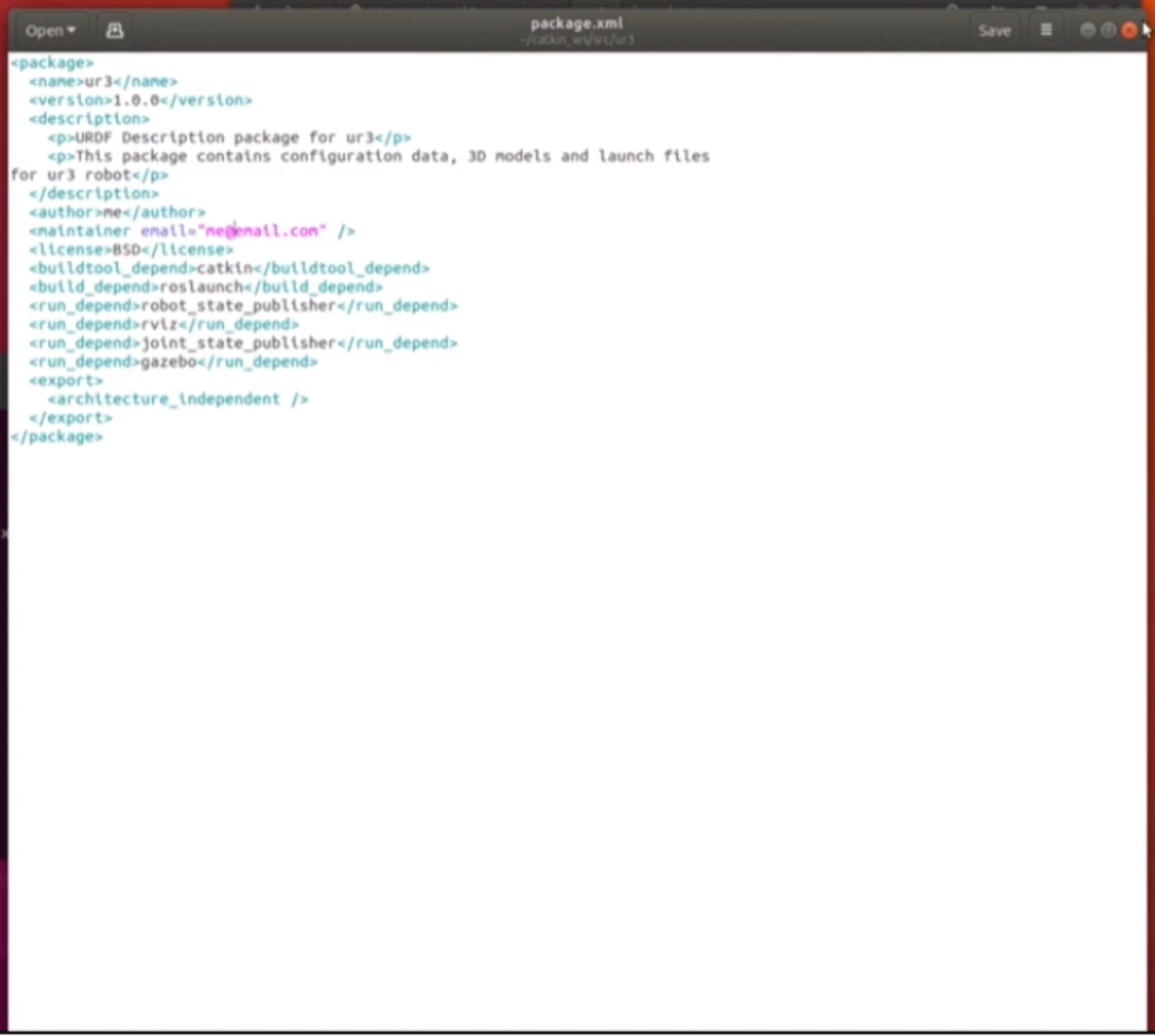
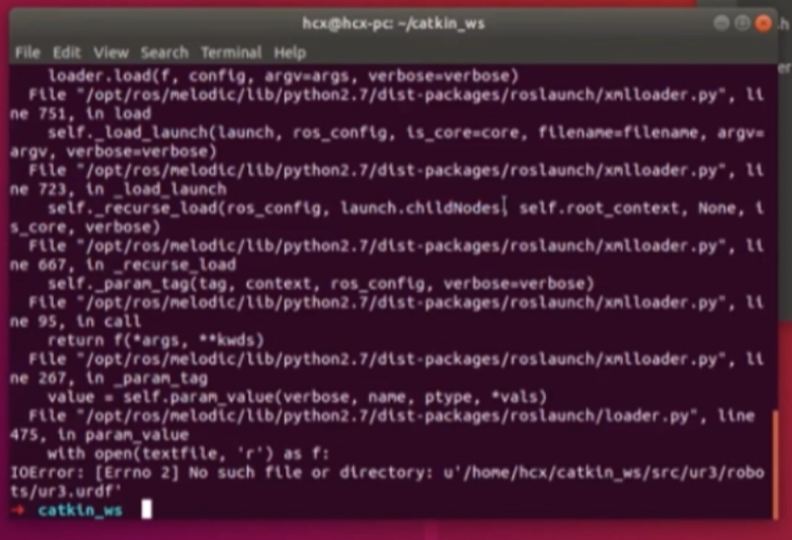
编译报错:
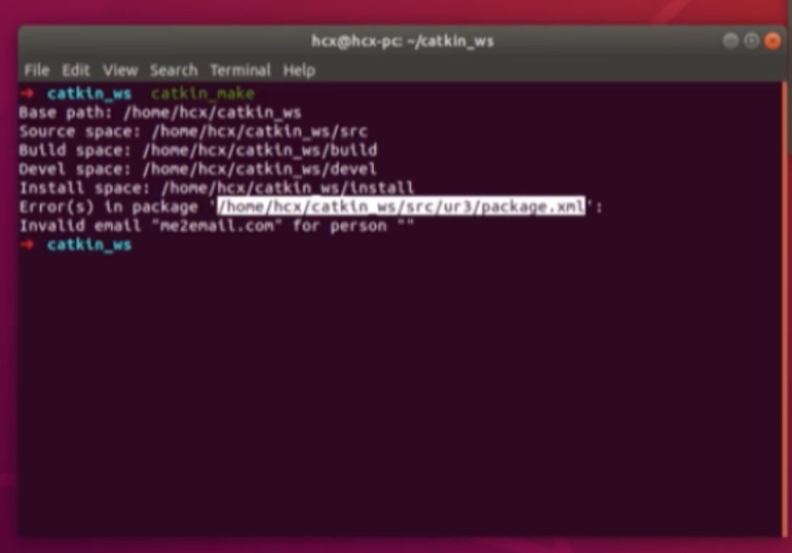
package.xml 将邮件地址的2改成@ 即可
编译通过后,运行:
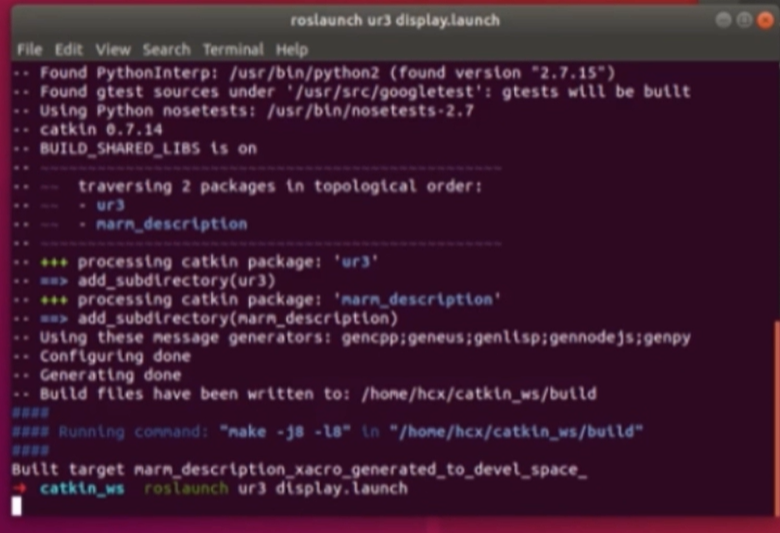
会报错:solidworks导出的bug:
将display.launch 存放urdf文件的文件夹, robot修改为 实际存放位置:urdf:

启动完成后:,显示rviz界面:
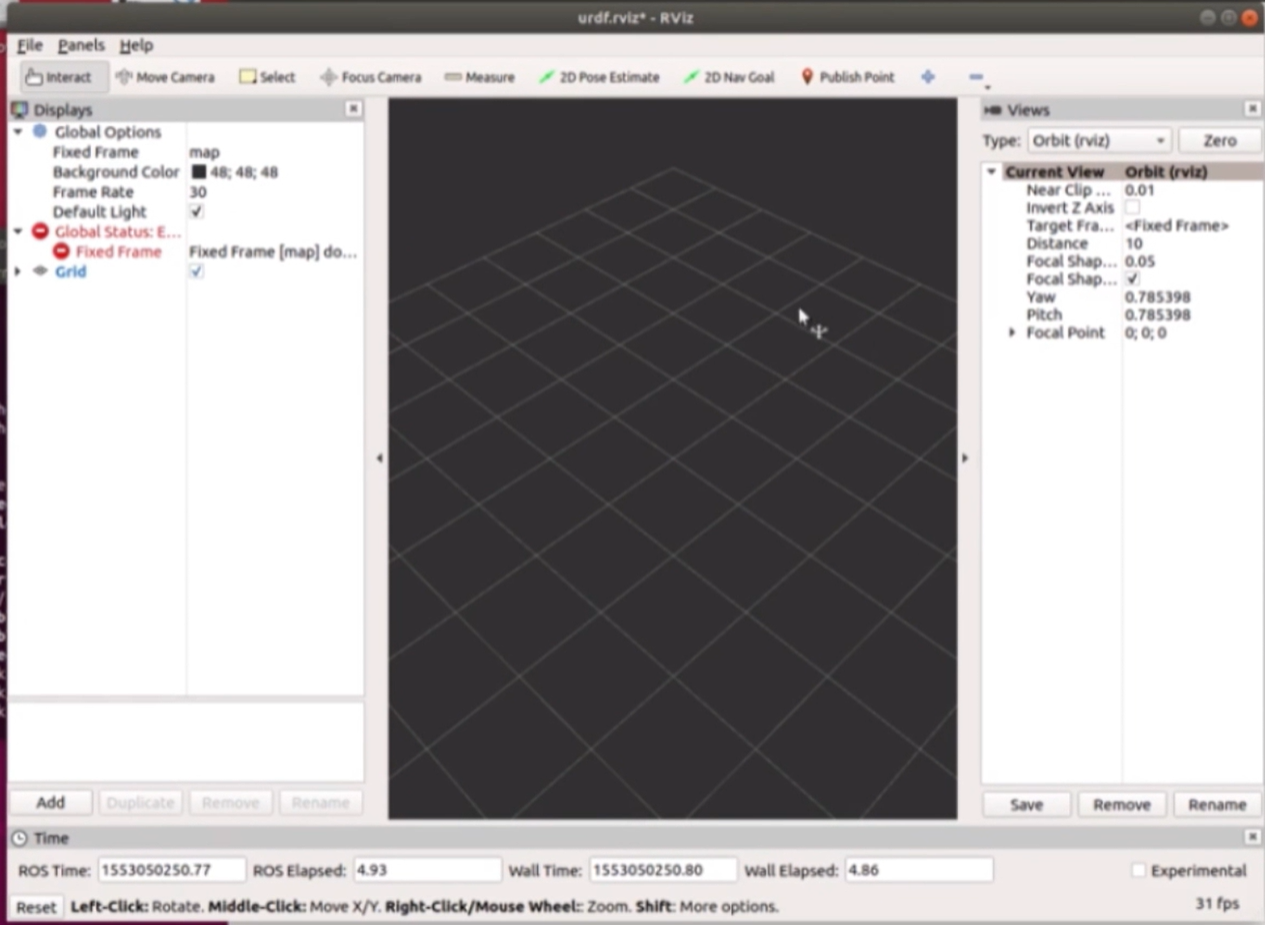
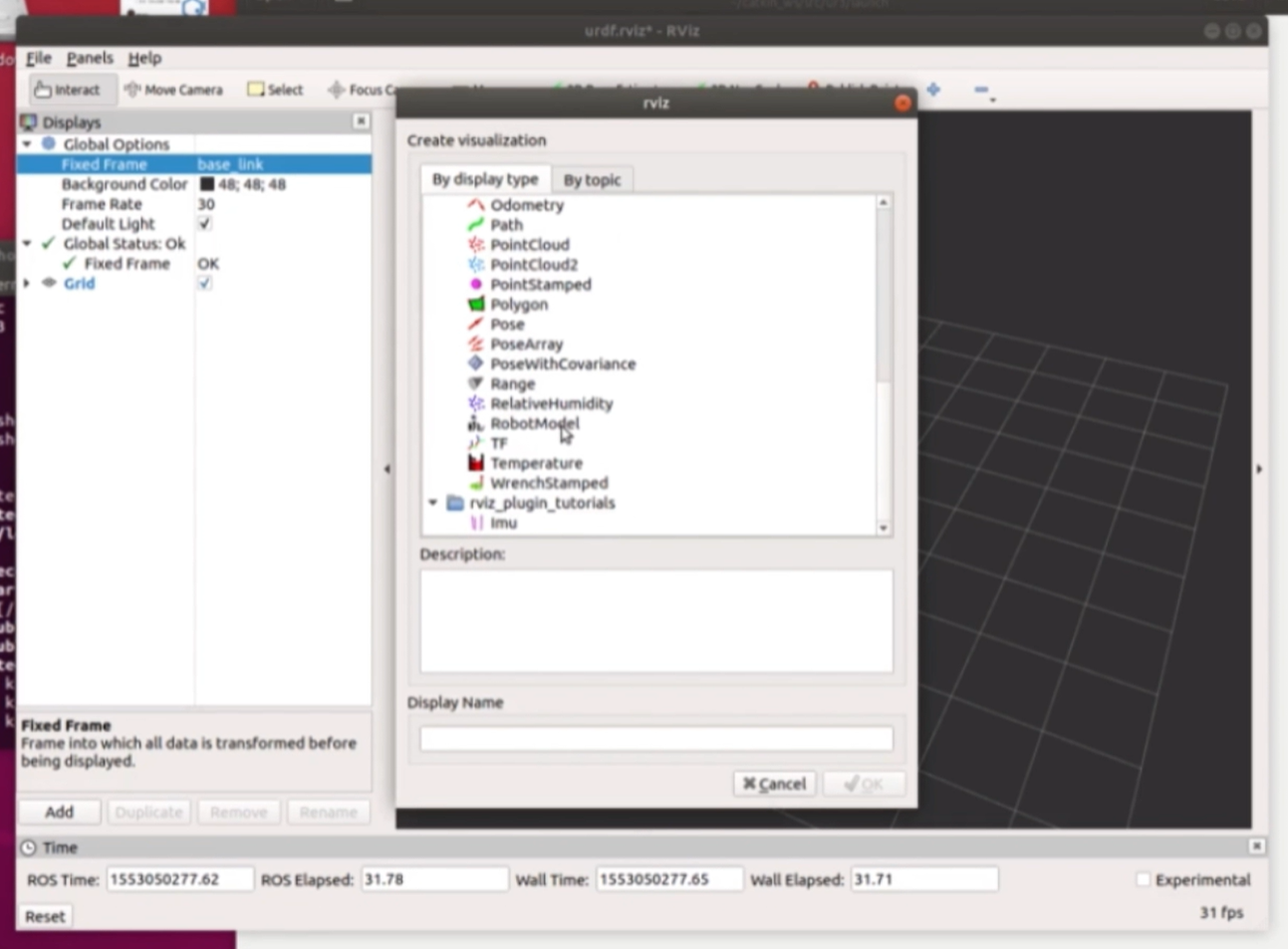
修改:Fixed Frame:map->base_link
添加Robot Model插件:
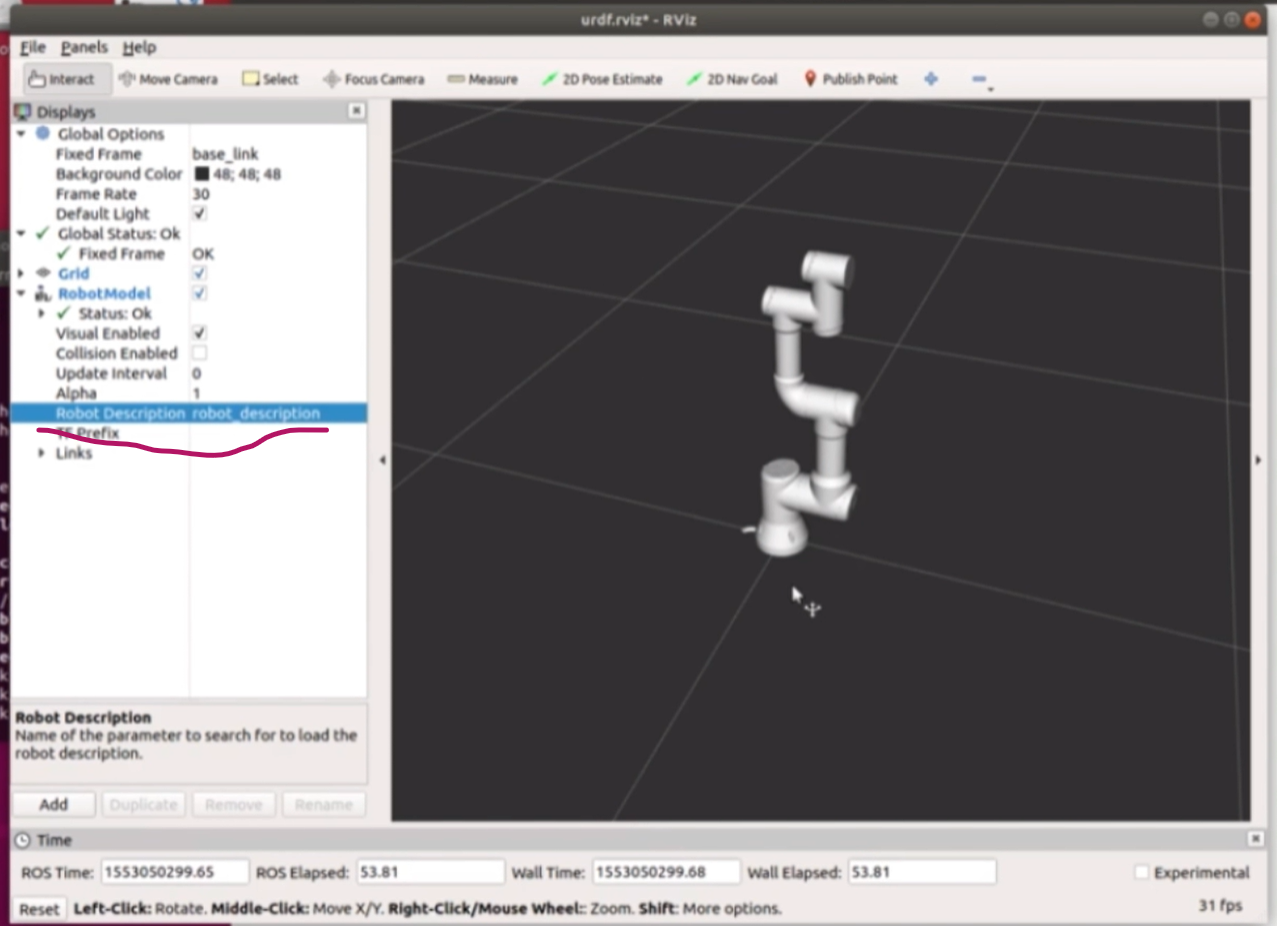
显示出机器人模型:
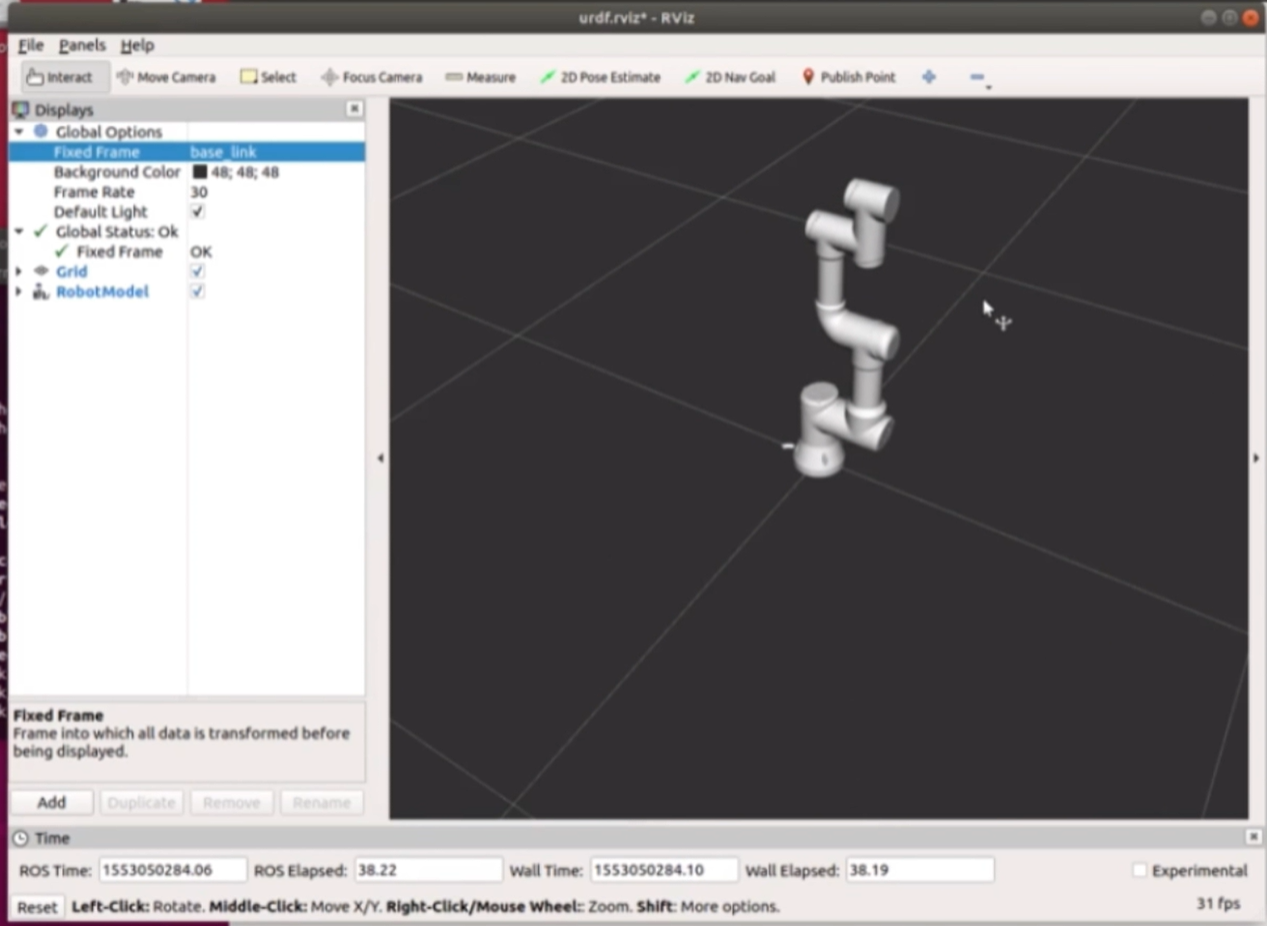
Robot Description为配置文件配置的robot_description
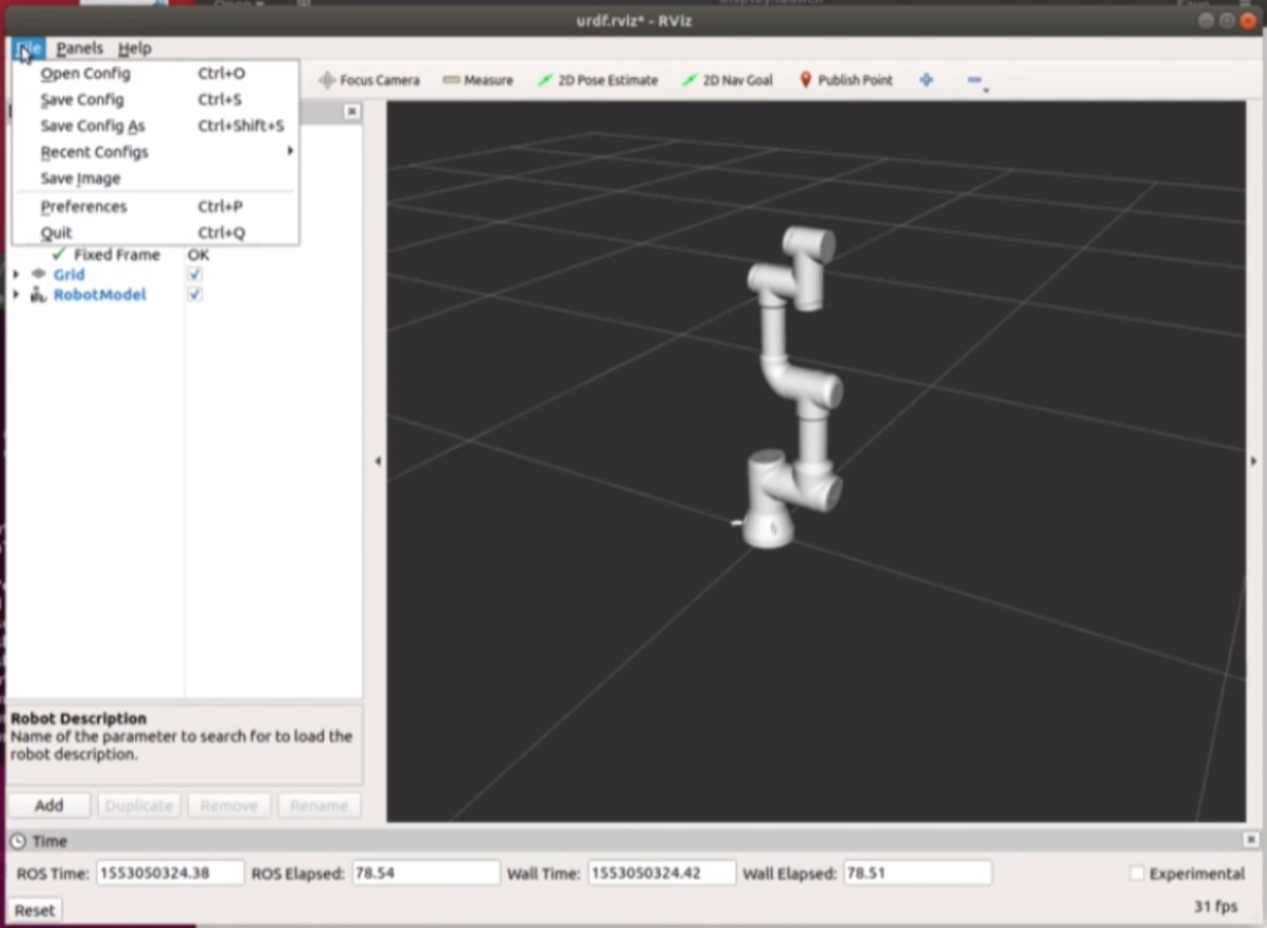
rviz配置好后,可以通过File-》Save Config进行保存:
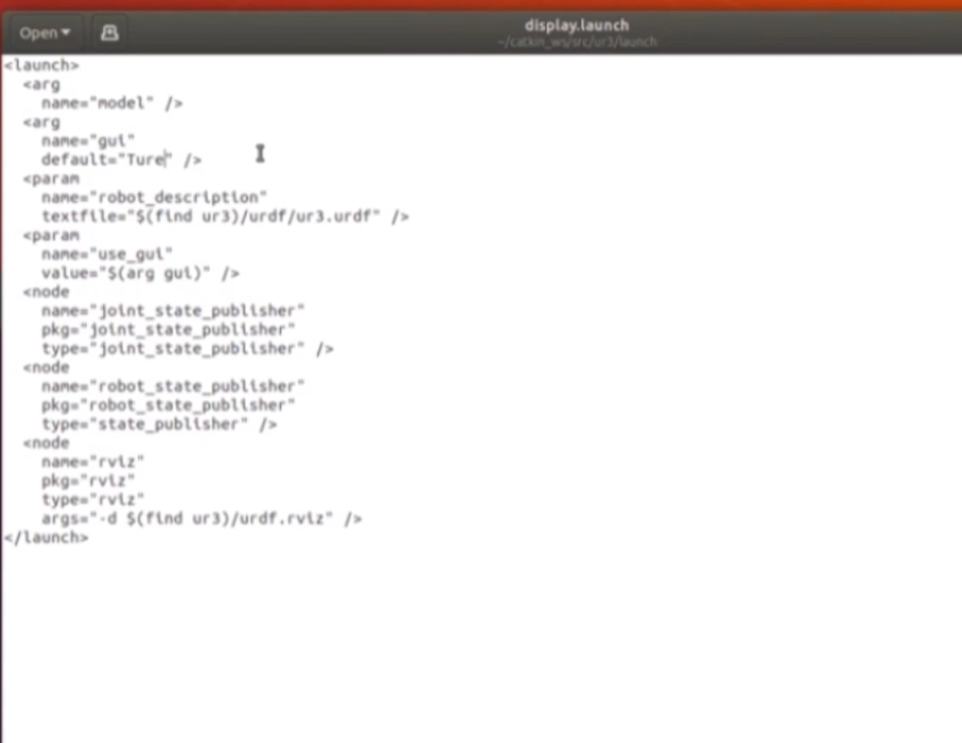
为可以控制机械臂关节运动,修改launch文件:
gui 的默认值修改为True:
重启机器人,即可出现控制界面:
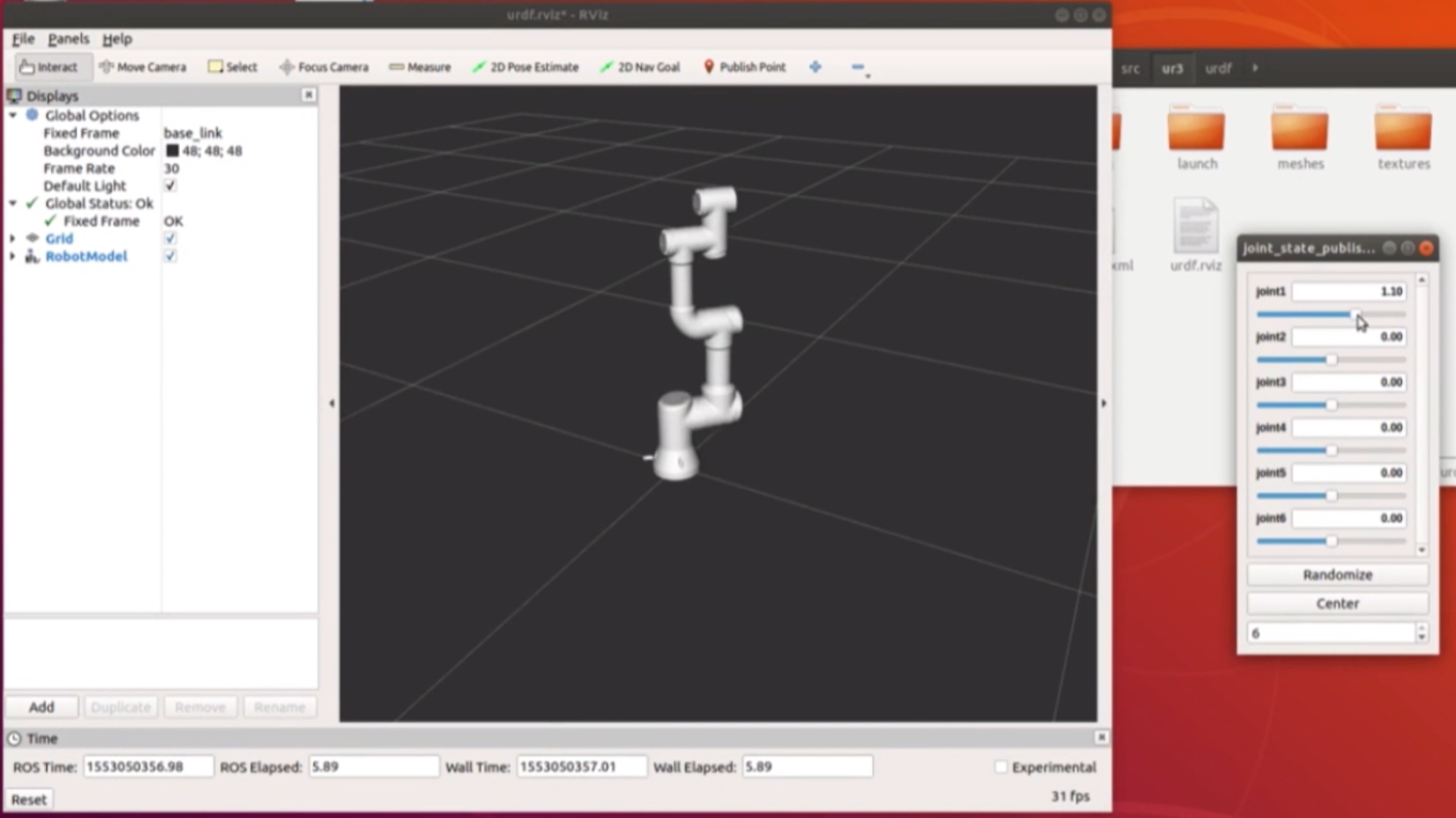
可拖动关节控制机器人运动。
到这里, 模型导入完成。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 【译】Visual Studio 中新的强大生产力特性
· 【设计模式】告别冗长if-else语句:使用策略模式优化代码结构
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义