


机械臂 - URDF建模
机器人建模文件样例:
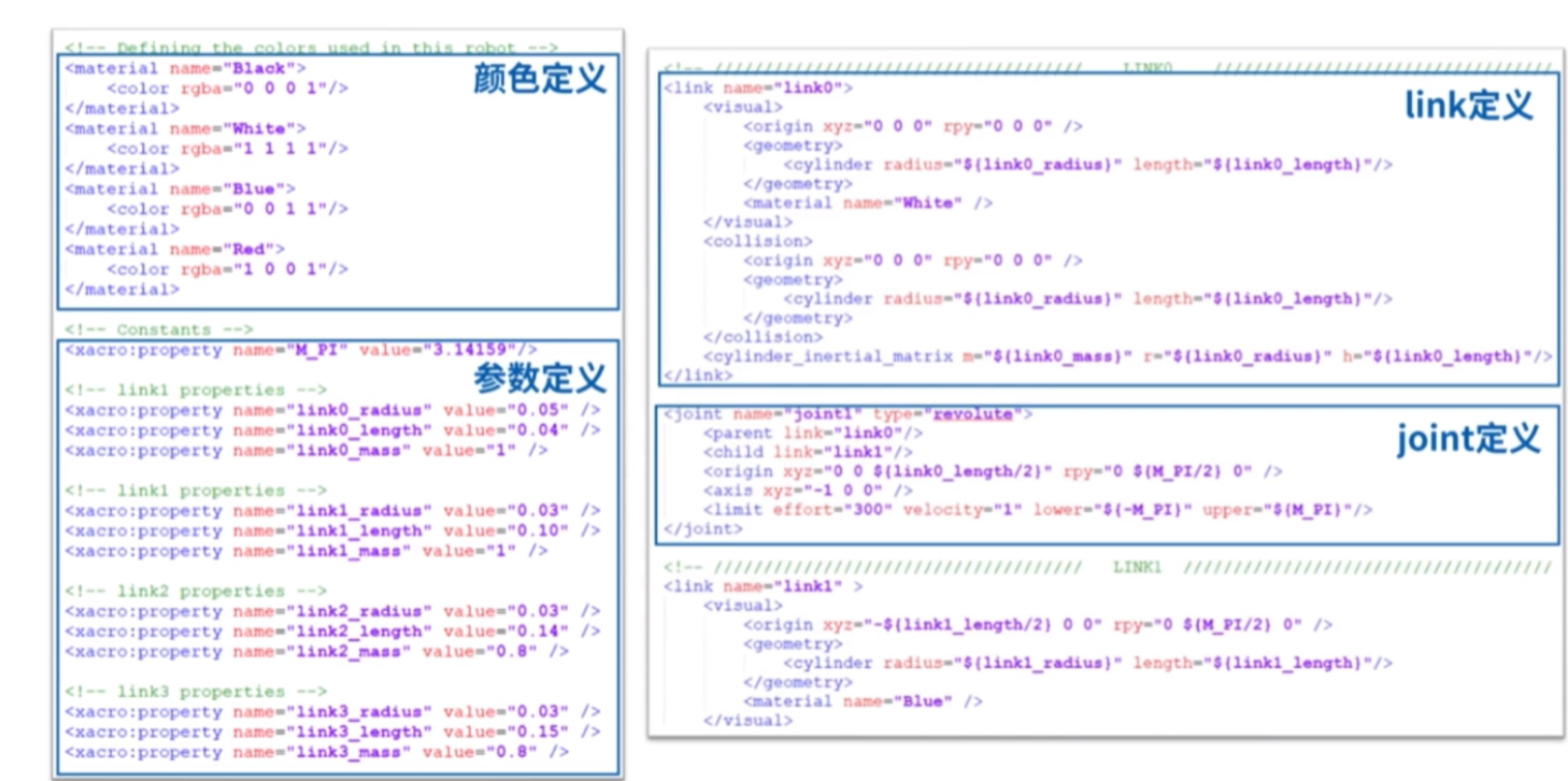
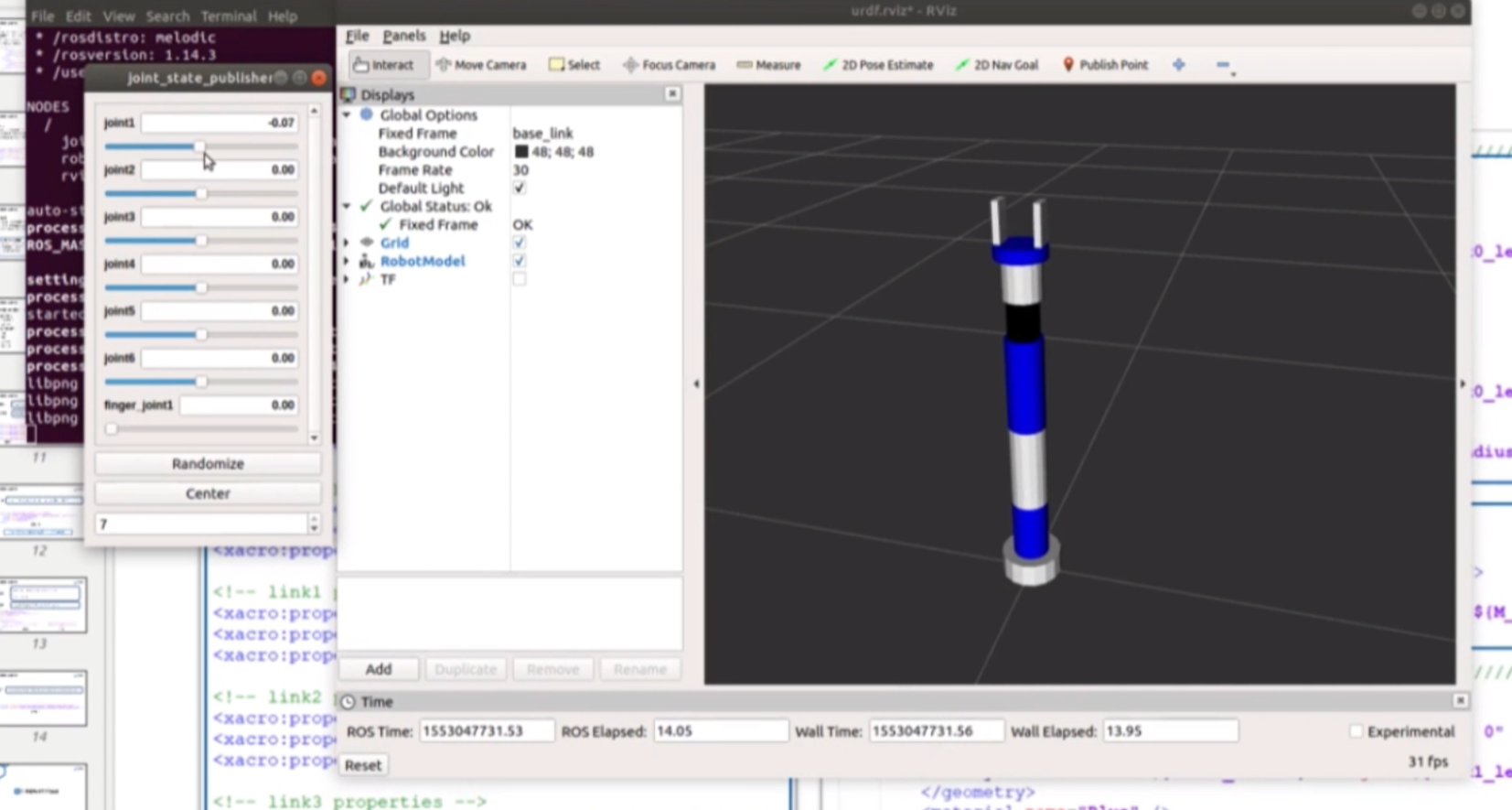
6轴机器人建模
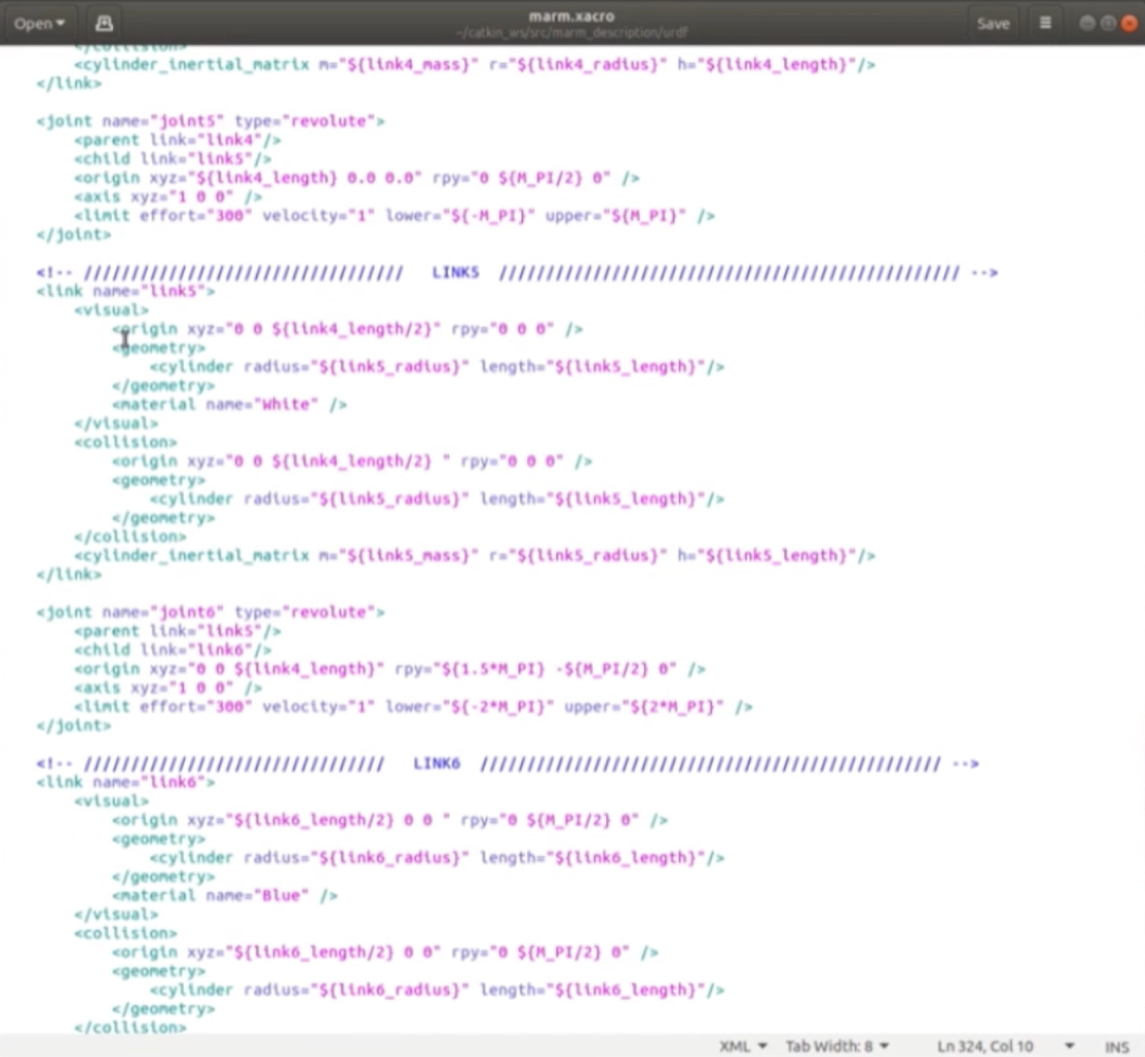
<?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="test"> <xacro:property name="length" value="0.6"/> <xacro:property name="radius" value="0.2"/> <link name="base_link"> <visual> <geometry> <cylinder length="${length}" radius="${radius}"/> </geometry> <material name="blue"/> </visual> </link> </robot>
启动文件:
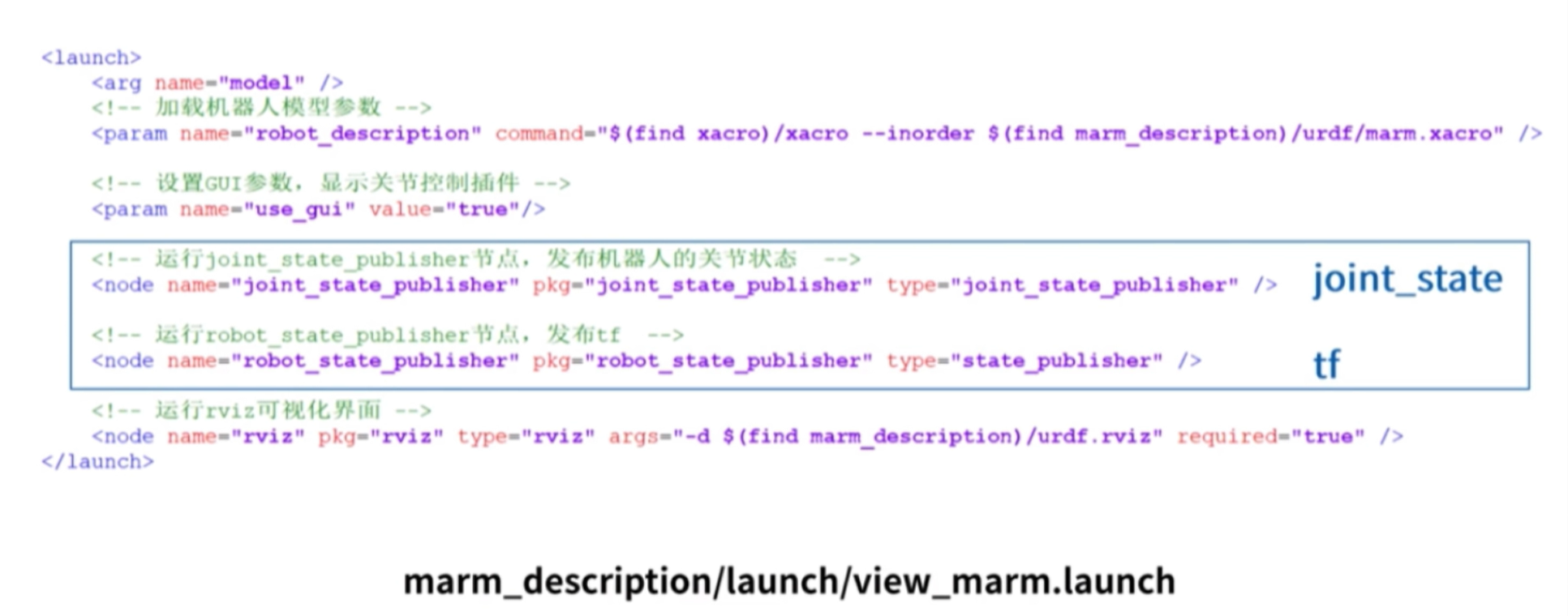
一个典型的launch文件:
<!-- robot_control.launch.py -->
<launch>
<!-- 1. 启动 joint_state_publisher -->
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher">
<!-- 传入 URDF 文件路径 -->
<param name="robot_description" textfile="$(find my_robot_description)/urdf/my_robot.urdf"/>
</node>
<!-- 2. 启动 robot_state_publisher -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<!-- 传入 URDF 文件路径 -->
<param name="robot_description" textfile="$(find my_robot_description)/urdf/my_robot.urdf"/>
</node>
<!-- 3. 启动机器人硬件接口 -->
<node pkg="my_robot_bringup" type="robot_hardware_interface" name="robot_hardware_interface">
<!-- 可以设定参数,如端口、通讯协议等 -->
</node>
<!-- 4. 启动运动控制器 -->
<node pkg="my_robot_control" type="joint_trajectory_controller" name="joint_trajectory_controller">
<!-- 可以配置控制器参数,如 PID 参数等 -->
</node>
<!-- 5. 启动路径规划器 MoveIt -->
<include file="$(find my_robot_moveit_config)/launch/move_group.launch.py">
<!-- 可以设定 MoveIt 配置文件路径和规划组 -->
<arg name="moveit_config" value="$(find my_robot_moveit_config)/config/my_robot.srdf"/>
<arg name="robot_description" value="$(arg robot_description)"/>
</include>
<!-- 6. 启动 RViz 可视化工具 -->
<node pkg="rviz2" type="rviz2" name="rviz2" args="-d $(find my_robot_rviz)/config/my_robot.rviz"/>
<!-- 7. 启动传感器数据节点 -->
<node pkg="my_robot_sensors" type="sensor_node" name="sensor_node">
<!-- 可以设定传感器参数和数据发布频率 -->
</node>
</launch>

