

Fast R-CNN 之 ROI Pooling原理及实现
目标检测architecture通常可以分为两个阶段:
(1)region proposal:给定一张输入image找出objects可能存在的所有位置。这一阶段的输出应该是一系列object可能位置的bounding box。这些通常称之为region proposals或者 regions of interest(ROI),在这一过程中用到的方法是基于滑窗的方式和selective search。
(2)final classification:确定上一阶段的每个region proposal是否属于目标一类或者背景。
这个architecture存在的一些问题是:
产生大量的region proposals 会导致performance problems,很难达到实时目标检测。
在处理速度方面是suboptimal。
无法做到end-to-end training。
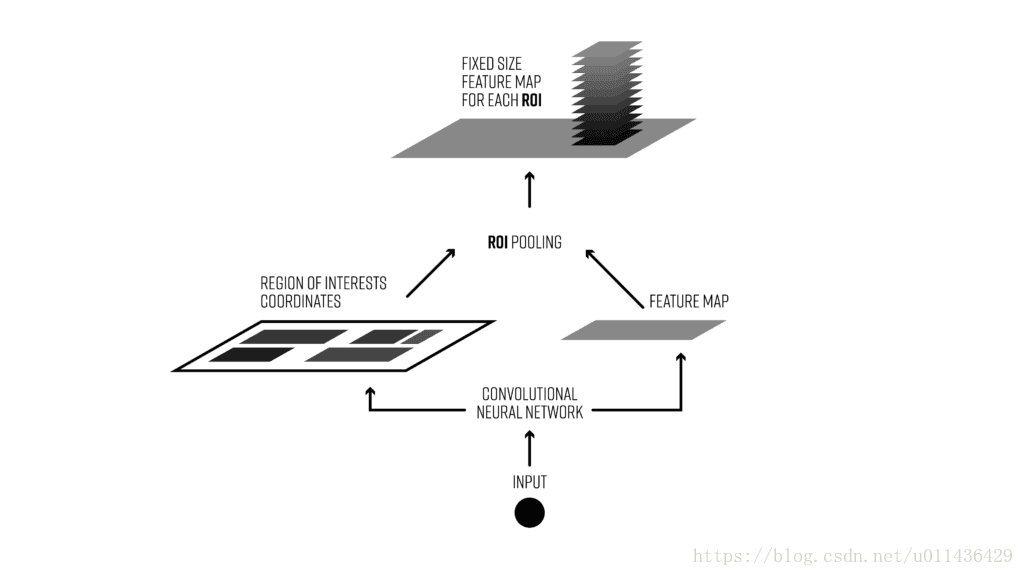
这就是ROI pooling提出的根本原因,ROI pooling层能实现training和testing的显著加速,并提高检测accuracy。该层有两个输入:
从具有多个卷积核池化的深度网络中获得的固定大小的feature maps;
一个表示所有ROI的N*5的矩阵,其中N表示ROI的数目。第一列表示图像index,其余四列表示其余的左上角和右下角坐标;
ROI pooling具体操作如下:
根据输入image,将ROI映射到feature map对应位置;
将映射后的区域划分为相同大小的sections(sections数量与输出的维度相同);
对每个sections进行max pooling操作;
这样我们就可以从不同大小的方框得到固定大小的相应 的feature maps。值得一提的是,输出的feature maps的大小不取决于ROI和卷积feature maps大小。ROI pooling 最大的好处就在于极大地提高了处理速度。
ROI pooling example
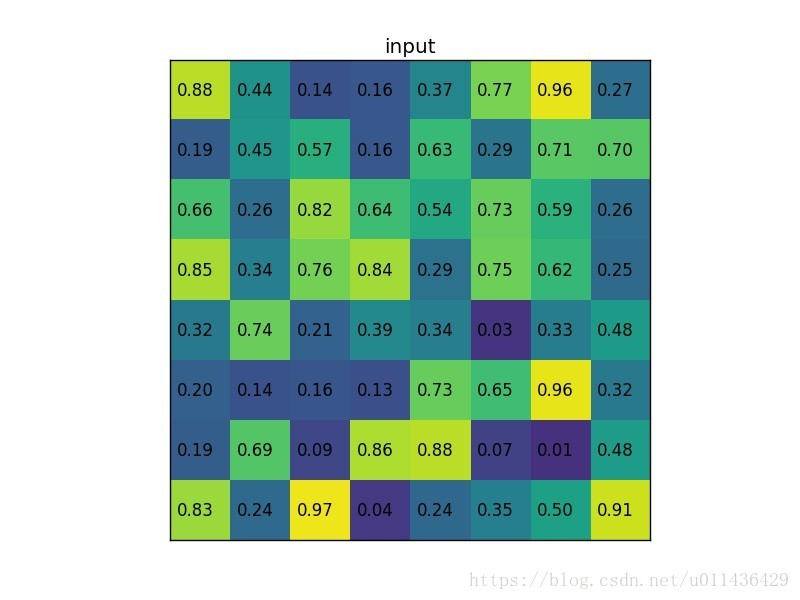
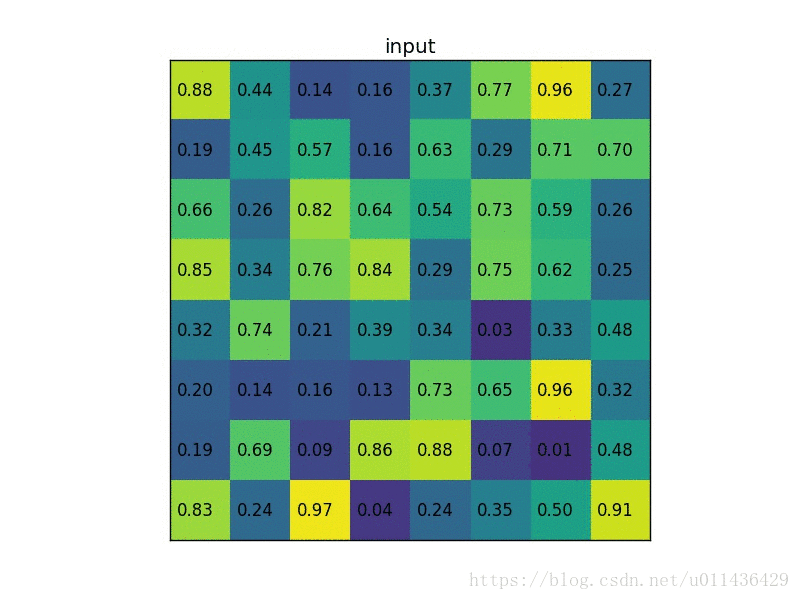
我们有一个8*8大小的feature map,一个ROI,以及输出大小为2*2.
输入的固定大小的feature map
region proposal 投影之后位置(左上角,右下角坐标):(0,3),(7,8)。
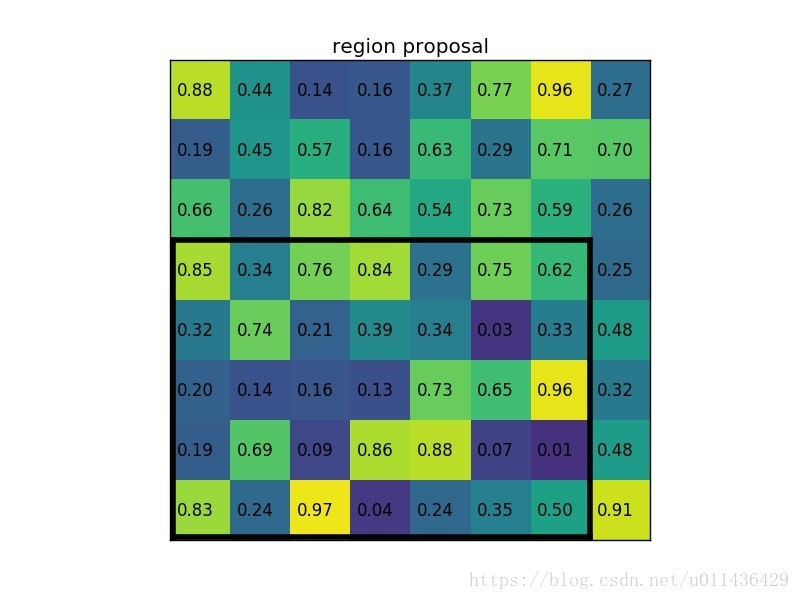
将其划分为(2*2)个sections(因为输出大小为2*2),我们可以得到:

对每个section做max pooling,可以得到:
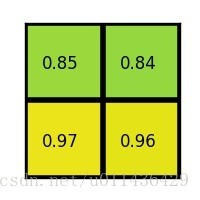
整体过程如下:
说明:在此案例中region proposals 是5*7大小的,在pooling之后需要得到2*2的,所以在5*7的特征图划分成2*2的时候不是等分的,行是5/2,第一行得到2,剩下的那一行是3,列是7/2,第一列得到3,剩下那一列是4。
ROI Pooling 就是将大小不同的feature map 池化成大小相同的feature map,利于输出到下一层网络中。
代码实现
$ git clone git@github.com:deepsense-io/roi-pooling.git $ cd roi-pooling $ python setup.py install from __future__ import print_function import tensorflow as tf import numpy as np from roi_pooling.roi_pooling_ops import roi_pooling # 4x4 feature map with only 1 channel input_value = [[ [[1], [2], [4], [4]], [[3], [4], [1], [2]], [[6], [2], [1], [7]], [[1], [3], [2], [8]] ]] input_value = np.asarray(input_value, dtype='float32') # regions of interest as lists of: # feature map index, upper left, bottom right coordinates rois_value = [ [0, 0, 0, 1, 3], [0, 2, 2, 3, 3], [0, 1, 0, 3, 2] ] rois_value = np.asarray(rois_value, dtype='int32') # in this case we have 3 RoI pooling operations: # * channel 0, rectangular region (0, 0) to (1, 3) # xx.. # xx.. # xx.. # xx.. # # * channel 0, rectangular region (2, 2) to (3, 3) # .... # .... # ..xx # ..xx # * channel 0, rectangular region (1, 0) to (3, 2) # .... # xxx. # xxx. # xxx. input_featuremap = tf.placeholder(tf.float32) rois = tf.placeholder(tf.int32) input_const = tf.constant(input_value, tf.float32) rois_const = tf.constant(rois_value, tf.int32) y = roi_pooling(input_const, rois_const, pool_height=2, pool_width=2) with tf.Session('') as sess: y_output = sess.run(y, feed_dict={input_featuremap: input_value, rois: rois_value}) print(y_output)
输出
[[[[ 3. 4.]
[ 6. 3.]]]
[[[ 1. 7.]
[ 2. 8.]]]
[[[ 4. 4.]
[ 4. 7.]]]]
————————————————
版权声明:本文为CSDN博主「Elag」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/u011436429/article/details/80279536

