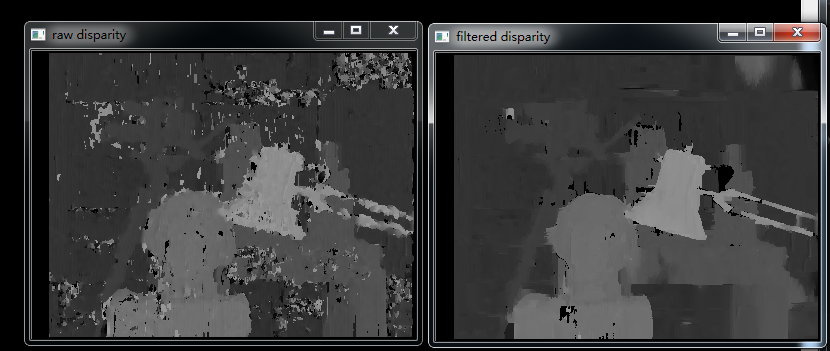
opencv wlsfilter depth refinement demo
参考
https://docs.opencv.org/3.2.0/d3/d14/tutorial_ximgproc_disparity_filtering.html
// This file is part of OpenCV project. // It is subject to the license terms in the LICENSE file found in the top-level directory // of this distribution and at http://opencv.org/license.html. #include "test_precomp.hpp" #include "opencv2/ximgproc/disparity_filter.hpp" #include <string> //CV_TEST_MAIN("") using namespace cv; using namespace std; using namespace ximgproc; int main() { string left_im = "C:\\Users\\Administrator\\Desktop\\green_tree\\left.bmp"; string right_im = "C:\\Users\\Administrator\\Desktop\\green_tree\\right.bmp"; Mat left = imread(left_im, IMREAD_COLOR); if (left.empty()) { cout << "Cannot read image file: " << left_im; return -1; } Mat right = imread(right_im, IMREAD_COLOR); if (right.empty()) { cout << "Cannot read image file: " << right_im; return -1; } int max_disp = 16; max_disp /= 2; if (max_disp % 16 != 0) max_disp += 16 - (max_disp % 16); Mat left_for_matcher, right_for_matcher; resize(left, left_for_matcher, Size(), 1.0, 1.0); resize(right, right_for_matcher, Size(), 1.0, 1.0); int wsize = 5; Ptr<StereoBM> left_matcher = StereoBM::create(max_disp, wsize); Ptr<DisparityWLSFilter> wls_filter; wls_filter = createDisparityWLSFilter(left_matcher); Ptr<StereoMatcher> right_matcher = createRightMatcher(left_matcher); cvtColor(left_for_matcher, left_for_matcher, COLOR_BGR2GRAY); cvtColor(right_for_matcher, right_for_matcher, COLOR_BGR2GRAY); double matching_time = (double)getTickCount(); Mat left_disp, right_disp, filtered_disp; left_matcher->compute(left_for_matcher, right_for_matcher, left_disp); right_matcher->compute(right_for_matcher, left_for_matcher, right_disp); matching_time = ((double)getTickCount() - matching_time) / getTickFrequency(); double lambda = 8000.0; double sigma = 0.5; wls_filter->setLambda(lambda); wls_filter->setSigmaColor(sigma); double filtering_time = (double)getTickCount(); wls_filter->filter(left_disp, left, filtered_disp, right_disp); filtering_time = ((double)getTickCount() - filtering_time) / getTickFrequency(); Mat raw_disp_vis; double vis_mult = 10.0; getDisparityVis(left_disp, raw_disp_vis, vis_mult); namedWindow("raw disparity", WINDOW_AUTOSIZE); imshow("raw disparity", raw_disp_vis); Mat filtered_disp_vis; getDisparityVis(filtered_disp, filtered_disp_vis, vis_mult); namedWindow("filtered disparity", WINDOW_AUTOSIZE); imshow("filtered disparity", filtered_disp_vis); waitKey(); return 0; }


 浙公网安备 33010602011771号
浙公网安备 33010602011771号