20201220蔡笃俊《信息安全系统设计与实现》第十二章学习笔记
一、任务内容
- 自学教材第12章,提交学习笔记(10分)
- 知识点归纳以及自己最有收获的内容 (3分)
- 问题与解决思路(2分)
- 实践内容与截图,代码链接(3分)
- ...(知识的结构化,知识的完整性等,提交markdown文档,使用openeuler系统等)(2分)
二、知识点归纳
本章讨论了块设备IO和缓冲区管理;解释了块设备I/O的原理和I/O缓冲的优点;论述了Unix的缓冲区管理算法,并指出了其不足之处;还利用信号量设计了新的缓冲区管理算法,以提高IO缓冲区的缓存效率和性能;表明了简单的PV算法易于实现,缓存效果好,不存在死锁和饥饿问题;还提出了一个比较Unix缓冲区管理算法和PV算法性能的编程方案。
1. 块设备I/O缓冲区
-
I/O缓冲的基本原理非常简单。文件系统使用一系列I/O缓冲区作为块设备的缓存内存。当进程试图读取(dev,blk)标识的磁盘块时。它首先在缓冲区缓存中搜索分配给磁盘块的缓冲区。如果该缓冲区存在并且包含有效数据、那么它只需从缓冲区中读取数据、而无须再次从磁盘中读取数据块。如果该缓冲区不存在,它会为磁盘块分配一个缓冲区,将数据从磁盘读人缓冲区,然后从缓冲区读取数据。
-
当某个块被读入时、该缓冲区将被保存在缓冲区缓存中,以供任意进程对同一个块的下一次读/写请求使用。同样,当进程写入磁盘块时,它首先会获取一个分配给该块的缓冲区。然后,它将数据写入缓冲区,将缓冲区标记为脏,以延迟写入,并将其释放到缓冲区缓存中。由于脏缓冲区包含有效的数据,因此可以使用它来满足对同一块的后续读/写请求,而不会引起实际磁盘I/O。
-
脏缓冲区只有在被重新分配到不同的块时才会写人磁盘。
2.Unix/Linux中的信号处理
- I/O缓冲区:内核中的一系列NBUF缓冲区用作缓冲区缓存。每个缓冲区用一个结构体表示。
- 设备表:每个块设备用一个设备表结构表示。
- 缓冲区初始化:当系统启动时,所有I/O缓冲区都在空闲列表中,所有设备列表和T/O队列均为空。
- 缓冲区列表:当缓冲区分配给(dev,blk)时,它会被插入设备表的dev_list中。如果缓冲区当前正在使用,则会将其标记为BUSY(繁忙)并从空闲列表中删除。
- Unix getblk/brelse算法
3. PV算法
BUFFER *getb1k(dev,blk):
while(1){
(1). P(free);
//get a free buffer first
if (bp in dev_1ist){
(2). if (bp not BUSY){
remove bp from freelist;P(bp);
// lock bp but does not wait
(3).return bp;
// bp in cache but BUSY V(free);
// give up the free buffer
(4).P(bp);
// wait in bp queue
return bp;v
// bp not in cache,try to create a bp=(dev,blk)
(5).bp = frist buffer taken out of freelist;P(bp);
// lock bp,no wait
(6).if(bp dirty){
awzite(bp);
// write bp out ASYNC,no wait
continue;
// continue from (1)
(7).reassign bp to(dev,blk);1/ mark bp data invalid,not dir return bp;-
// end of while(1);
brelse(BUFFER *bp),
{
(8).iF (bp queue has waiter)( V(bp); return; ]
(9).if(bp dirty && free queue has waiter){ awrite(bp);zeturn;}(10).enter bp into(tail of) freelist;V(bp);V(free);
}
特点:
- 缓冲区唯一性
- 无重试循环
- 无不必要唤醒
- 缓存效果
4. I/O缓冲区管理算法比较
项目分为以下几个结构:
- Box#1:用户界面﹐这是模拟系统的用户界面部分,提示输人命令、显示命令执行、显示系统状态和执行结果等。在开发过程中,可以手动输入命令来执行任务。在最后测试过程中,任务应该有自己的输入命令序列
- Box#2:多任务处理系统的CPU端,模拟单处理器(单CPU)文件系统的内核模式。当系统启动时,它会创建并运行一个优先级最低的主任务,但它会创建ntask工作任务,所有任务的优先级都是1,并将它们输人readyQueue。然后,主任务执行以下代码,该代码将任务切换为从readyQueue运行工作任务。
- 缓冲区管理器
- 磁盘驱动程序:start_io():维护设备IO队列,并对IO队列中的缓冲区执行I/O操作;中断处理程序:在每次I/O操作结束时,磁盘控制器会中断 CPU。
- 磁盘控制器:Box#3:磁盘控制器,它是主进程的一个子进程。因此,它与CPU端独立运行,除了它们之间的通信通道,通信通道是CPU和磁盘控制器之间的接口。通信通道由主进程和子进程之间的管道实现。
- 命令:从CPU到磁盘控制器的1/O命令。
- DataOut:在写操作中从CPU到磁盘控制器的数据输出。
- DataIn:在读操作中从磁盘控制器到CPU的数据。
- IntStatus:从磁盘控制器到CPU的中断状态。
- IntAck:从 CPU到磁盘控制器的中断确认。
- 磁盘中断:从磁盘控制器到CPU的中断由SIGUSR1(#10)信号实现。在每次IO操作结束时,磁盘控制器会发出 kill(ppid, SIGUSR1)系统调用,向父进程发送SIGUSR1信号,充当虚拟CPU中断。通常,虚拟CPU会在临界区屏蔽出/人磁盘中断(信号)。为防止竞态条件,磁盘控制器必须要从CPU接收一个中断确认,才能再次中断。
- 虚拟磁盘:Box#4:Linux文件模拟的虚拟磁盘。使用Linux系统调用lseek()、read(和write(),支持虚拟磁盘上的任何块I/O操作。为了简单起见,将磁盘块大小设置为16字节。由于数据内容无关紧要,所以可以将它们设置为16个字符的固定序列。
三、实践过程与截图
尝试Unix I/O缓冲区管理算法:
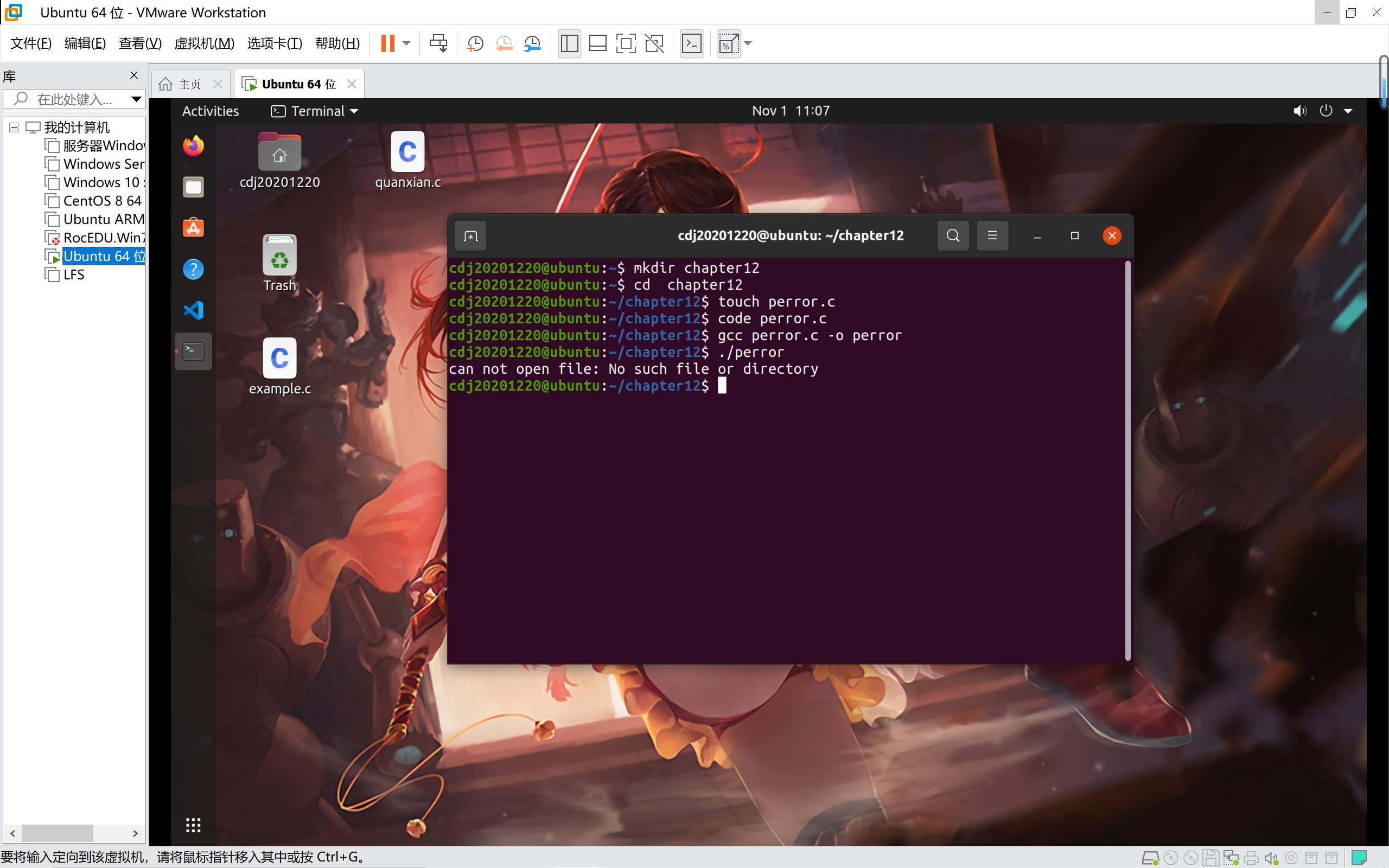
一、perror()
perror()用来将上一个函数发生错误的原因输出到标准设备 (stderr) 。参数 s 所指的字符串会先打印出,后面再加上出错原因字符串。此错误原因依照全局变量error 的值来决定要输出的字符串。在库函数中有个error变量,每个 error值对应着以字符串表示的错误类型,可以利用strerror(int)函数将出错字符串信息打印出来 。当调用"某些"函数出错时,该函数已经重新设置了error的值。perror函数只是将你入的一些信息和现在的error所对应的错误一起输出。
#include <stdio.h>
#include <errno.h>
#include <stdlib.h>
int main()
{
FILE* fd;
fd = fopen("/src/hello","r");
if(NULL == fd)
{
perror("can not open file");
return -1;
}
return 0;
}
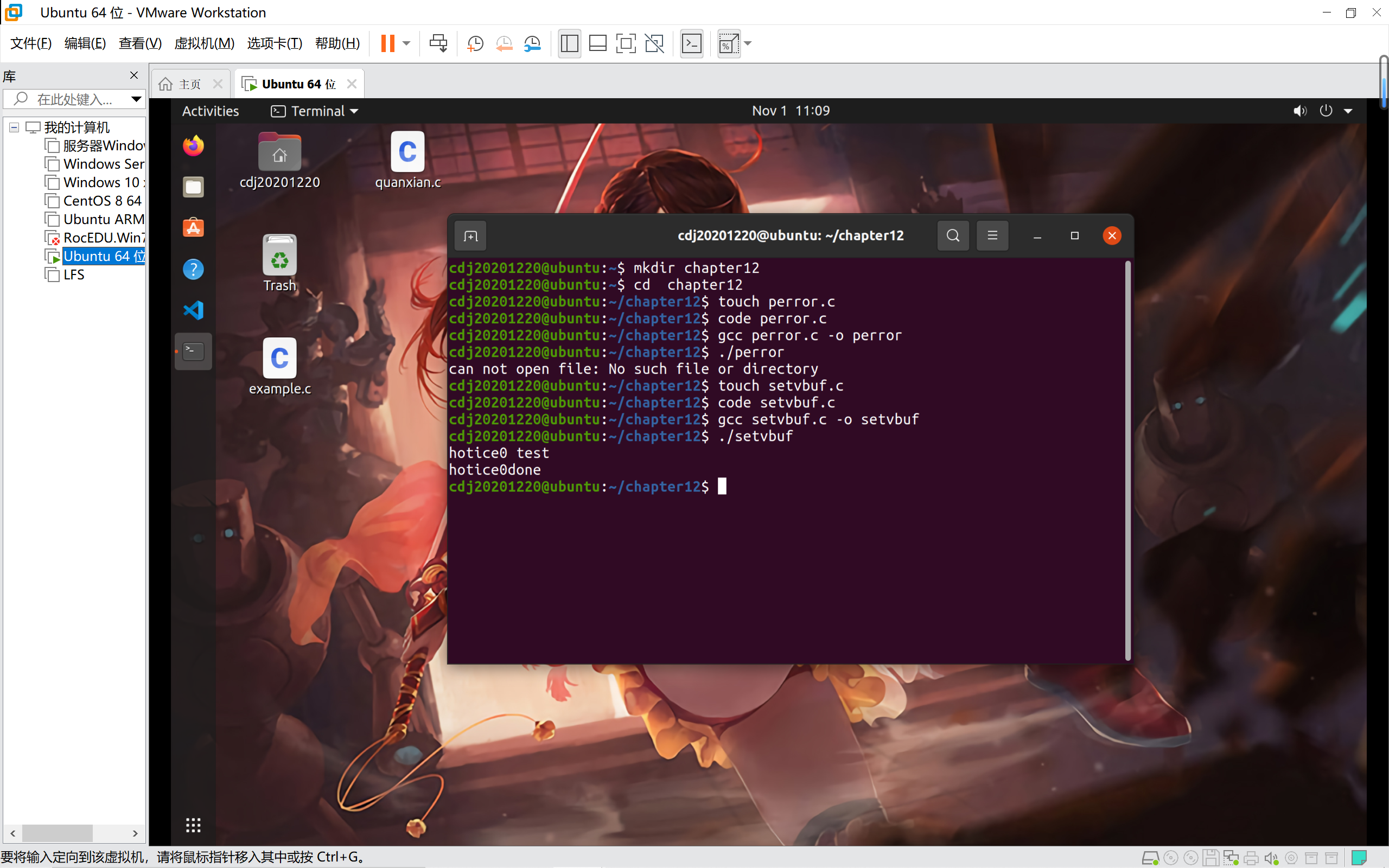
二、setvbuf()
使用setvbuf函数改变终端原有的行缓冲为无缓冲(第一个sleep3秒时 hotice0不会显示,打印test\n时会将hotice0一起显示,而后面的hotice0会直接打印出来)
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
int main(int argc, char **args)
{
printf("hotice0");
sleep(3);
printf(" test\n");
sleep(3);
if (setvbuf(stdout, NULL, _IONBF, 0) < 0) {
perror("setvbuf");
exit(EXIT_FAILURE);
}
printf("hotice0");
sleep(3);
printf("done\n");
return EXIT_SUCCESS;
}
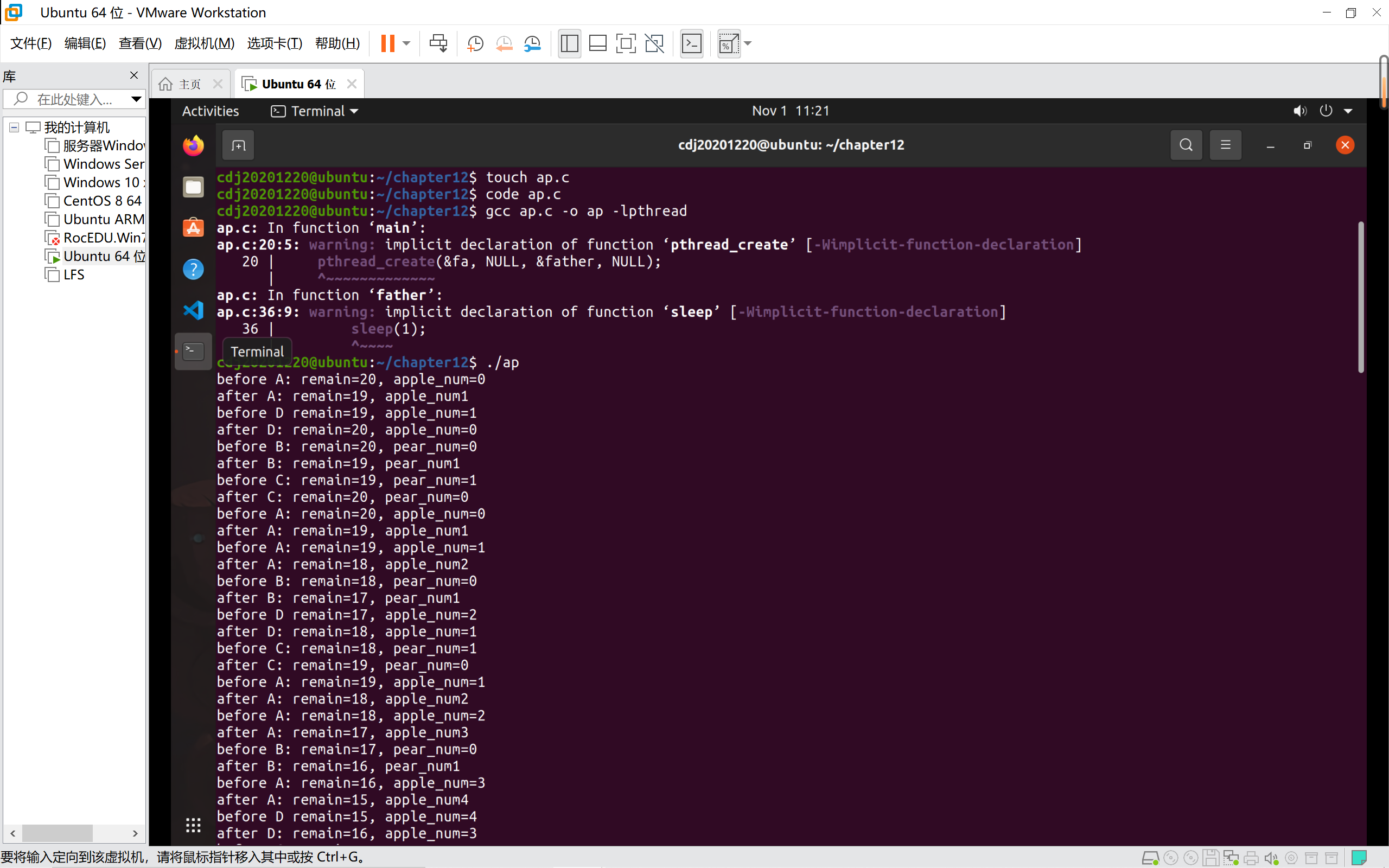
进程同步——消费者问题:
#include <stdio.h>
#include <stdlib.h>
#include <semaphore.h>
#include <errno.h>
#define total 20
sem_t remain, apple, pear, mutex;
static unsigned int vremain = 20, vapple = 0, vpear = 0;
void *father(void *);
void *mather(void *);
void *son(void *);
void *daughter(void *);
void print_sem();
int main()
{
pthread_t fa, ma, so, da;
sem_init(&remain, 0, total);//总数初始化为20
sem_init(&apple, 0, 0);//盆子中苹果数, 开始为0
sem_init(&pear, 0, 0);//盆子中梨子数, 开始为0
sem_init(&mutex, 0, 1);//互斥锁, 初始为1
pthread_create(&fa, NULL, &father, NULL);
pthread_create(&ma, NULL, &mather, NULL);
pthread_create(&so, NULL, &son, NULL);
pthread_create(&da, NULL, &daughter, NULL);
for(;;);
}
void *father(void *arg)
{
while(1)
{
sem_wait(&remain);
sem_wait(&mutex);
printf("before A: remain=%u, apple_num=%u\n", vremain--, vapple++);
printf("after A: remain=%u, apple_num%u\n", vremain, vapple);
sem_post(&mutex);
sem_post(&apple);
sleep(1);
}
}
void *mather(void *arg)
{
while(1)
{
sem_wait(&remain);
sem_wait(&mutex);
printf("before B: remain=%u, pear_num=%u\n", vremain--, vpear++);
printf("after B: remain=%u, pear_num%u\n", vremain, vpear);
sem_post(&mutex);
sem_post(&pear);
sleep(2);
}
}
void *son(void *arg)
{
while(1)
{
sem_wait(&pear);
sem_wait(&mutex);
printf("before C: remain=%u, pear_num=%u\n", vremain++, vpear--);
printf("after C: remain=%u, pear_num=%u\n", vremain, vpear);
sem_post(&mutex);
sem_post(&remain);
sleep(3);
}
}
void *daughter(void *arg)
{
while(1)
{
sem_wait(&apple);
sem_wait(&mutex);
printf("before D remain=%u, apple_num=%u\n", vremain++, vapple--);
printf("after D: remain=%u, apple_num=%u\n", vremain, vapple);
sem_post(&mutex);
sem_post(&remain);
sleep(3);
}
}
void print_sem()
{
int val1, val2, val3;
sem_getvalue(&remain, &val1);
sem_getvalue(&apple, &val2);
sem_getvalue(&pear, &val3);
printf("Semaphore: remain:%d, apple:%d, pear:%d\n", val1, val2, val3);
}
三、问题与解决思路
问题:setbuf()函数和setvbuf()函数的区别是什么?
- 函数setbuf()用于将指定缓冲区与特定的文件流相关联,实现操作缓冲区时直接操作文件流的功能。函数原型为void setbuf(FILE * stream, char * buf)。参数stream为文件流指针,buf为缓冲区的起始地址。如果参数buf 为NULL 指针,则为无缓冲,setbuf()相当于调用setvbuf(stream, buf, buf ? _IOFBF : _IONBF, BUFSIZE)。在打开文件流后,读取内容之前,可以调用setbuf()来设置文件流的缓冲区
- setvbuf()函数设置文件流的缓冲区,函数原型为int setvbuf(FILE * stream, char * buf, int type, unsigned size)。参数stream为文件流指针,buf为缓冲区首地址,type为缓冲区类型,size为缓冲区内字节的数量。
setbuf()和setvbuf()函数的实际意义在于:用户打开一个文件后,可以建立自己的文件缓冲区,而不必使用fopen()函数打开文件时设定的默认缓冲区。这样就可以让用户自己来控制缓冲区,包括改变缓冲区大小、定时刷新缓冲区、改变缓冲区类型、删除流中默认的缓冲区、为不带缓冲区的流开辟缓冲区等。简单来理解,setbuf()函数:把缓冲区与流相关联头文件;setvbuf()函数:设置文件流的缓冲区头文件。
参考链接:https://blog.csdn.net/weixin_42394206/article/details/117008357

 浙公网安备 33010602011771号
浙公网安备 33010602011771号