单视图几何标定
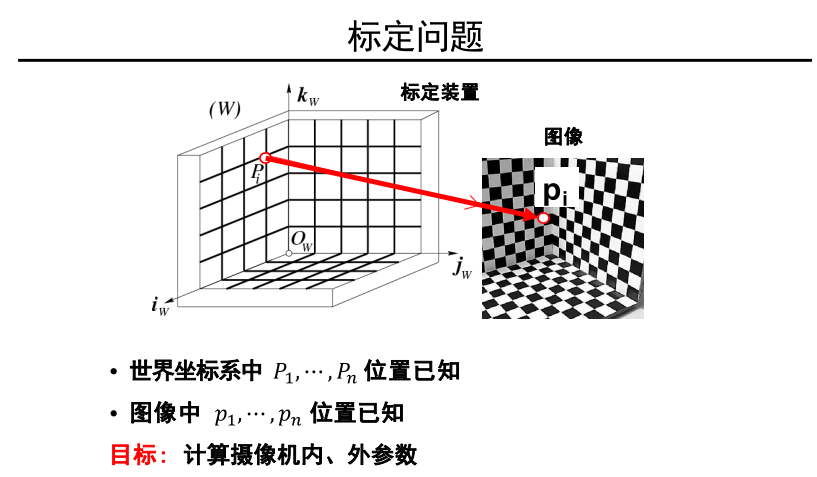
非畸变情况的单视图标定
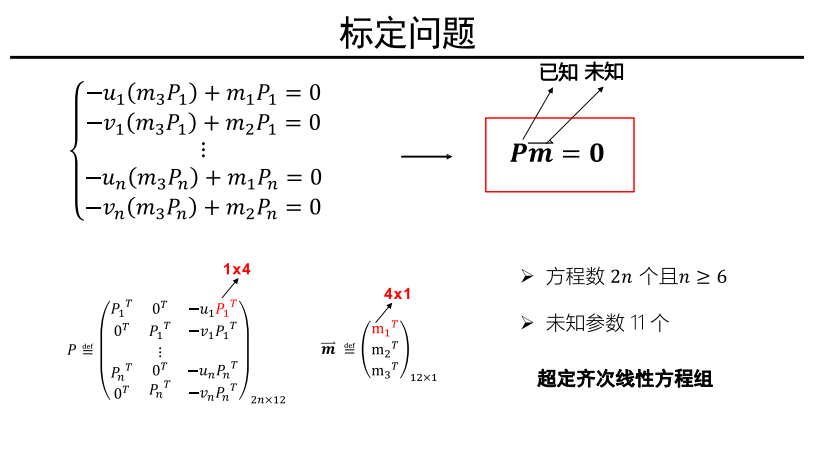
- 求解的最小二乘解,由于是超定齐次方程组,通过SVD求解得到M
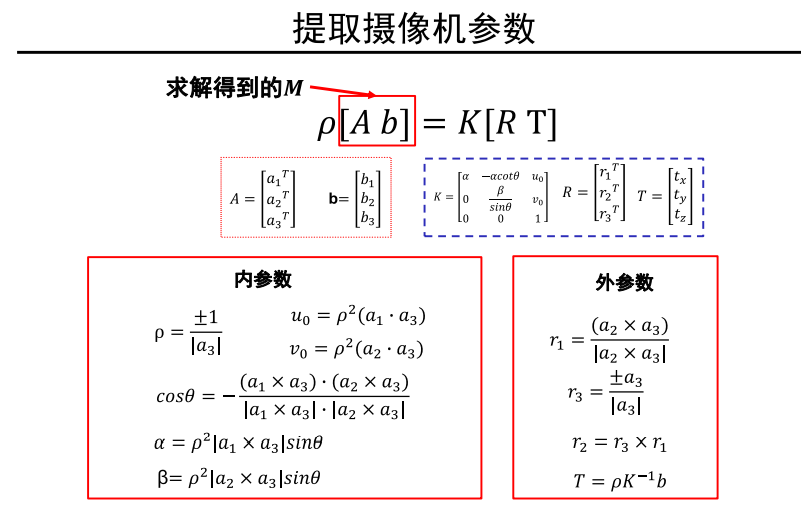
- 将M分解为和b,先计算内参数得到K矩阵,再计算R和T外参数矩阵。
注意:最少选取六对点作为输入参数,这六对点不能位于同一平面因为三个点可以确定一个平面,第四个同平面的点可以被三个点表示,计算结果退化。
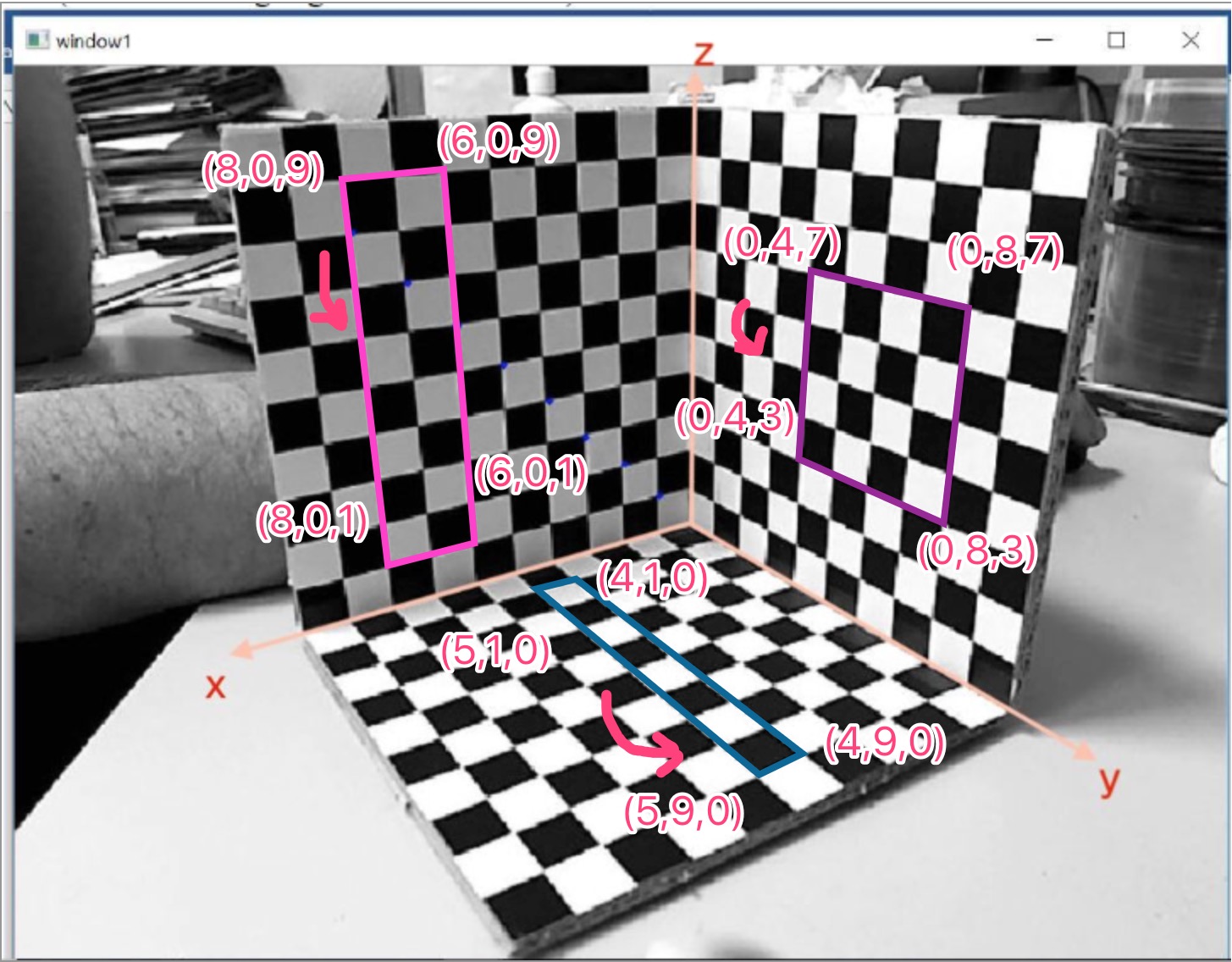
把图中黑白块单元格边长看作一个像素,手动输入计算参数。
Python程序
运行结果可以在colab中观看:colab:https://colab.research.google.com/drive/1HQN0BF0VmRP79pboOk3peWTqm6GewpaJ?usp=sharing
完全参考自 https://github.com/CV-xueba/Total3DExercises/tree/main/MVGlab01_camera-calibration-master
import numpy as np
from numpy import linalg as LA
class SingleCamera:
# 初始化参数
def __init__(self, world_coor, pixel_coor, n):
self.__world_coor = world_coor
self.__pixel_coor = pixel_coor
self.__point_num = n
self.__P = np.empty([2*self.__point_num,12],dtype=float)
self.__roM = np.empty([3,4], dtype=float)
self.__A = np.empty([3,3], dtype=float)
self.__b = np.empty([3,1], dtype=float)
self.__K = np.empty([3,3], dtype=float)
self.__R = np.empty([3,3], dtype=float)
self.__T = np.empty([3,3], dtype=float)
# 构造P矩阵的形式 2n*12
def composeP(self):
P = np.empty([2*self.__point_num,12],dtype=float)
i=0
while(i< self.__point_num):
Pi = self.__world_coor[i]
fourzero =np.zeros([4],dtype=float)
uminusPi = -self.__pixel_coor[i][0]*Pi
vminusPi = -self.__pixel_coor[i][1]*Pi
P[2*i] = np.hstack((Pi,fourzero,uminusPi))
P[2*i+1] = np.hstack((fourzero,Pi,vminusPi))
i+=1
print("Now P is with the form of :")
print(P)
print('\n')
self.__P = P
# 对PM=0中P奇异值分解得到M[A,b]
def svdP(self):
U,sigma,Vt = LA.svd(self.__P)
V = np.transpose(Vt)
# print(V[:,-1])
roM = V[:,-1].reshape(3,4)
print("roM:")
print(roM)
print('\n')
A = roM[:,0:3].copy()
b = roM[:,3:4].copy()
print("A(3x3):")
print(A)
print("b(3x1):")
print(b)
self.__A = A
self.__b = b
self.__roM = roM
# 计算内参数/外参数
def solve(self):
a3T = self.__A[2]
a3Norm = LA.norm(a3T)
rho = 1/a3Norm
print("The rho is %f \n" % rho)
a1T = self.__A[0]
a2T = self.__A[1]
cx = rho*rho*(np.dot(a1T,a3T))
cy = rho*rho*(np.dot(a2T,a3T))
print("The cx is %f \n The cy is %f" %(cx,cy))
aCross13=np.cross(a1T,a3T)
aCross23=np.cross(a2T,a3T)
theta =np.arccos( -np.dot(aCross13,aCross23)/LA.norm(aCross13)/LA.norm(aCross23))
print("The theta is %f: \n" %theta)
alpha = rho*rho*LA.norm(aCross13)*np.sin(theta)
beta = rho*rho*LA.norm(aCross23)*np.sin(theta)
print("alpha:%f \n beta:%f \n"%(alpha,beta))
# the K
K = np.array([alpha,-alpha*np.cos(theta),cx,0,beta/np.sin(theta),cy,0,0,1])
K = K.reshape(3,3)
print("The K:")
print(K)
print('\n')
self.__K = K
# compute R
r1 = aCross23/LA.norm(aCross23)
r3 = rho*a3T
r2 = np.cross(r1,r3)
R = np.hstack((r1,r2,r3))
R.reshape(3,3)
print("The Rotation:");
print(R)
print('\n')
self.__R=R
# compute T
T = rho*np.dot(LA.inv(K),self.__b)
print("The T:")
print(T)
print('\n')
self.__T=T
# 验证参数矩阵效果
def selfcheck(self,w_check,c_check):
my_size = c_check.shape[0]
my_err = np.empty([my_size])
for i in range(my_size):
test_pix = np.dot(self.__roM,w_check[i])
u = test_pix[0]/test_pix[2]
v = test_pix[1]/test_pix[2]
u_c = c_check[i][0]
v_c = c_check[i][1]
print("test point index:%d \n"%i)
print("the predcit u & v:(%f,%f)\n"%(u,v))
print("the orign u & v in world\n:(%f,%f)"%(u_c,v_c))
my_err[i]=(abs(u-u_c)/u_c+abs(v-v_c)/v_c)/2
average_err = my_err.sum()/my_size
print("The average error is %f:\n"%average_err)
if average_err > 0.1:
print("average error is more than 0.1, is bad")
else:
print("average error is smaller tha 0.1, is acceptable")
测试结果:可以看到计算结果相对准确。
test point index:0
the predcit u & v:(369.955752,296.987629)
the orign u & v in world
:(369.000000,297.000000)
test point index:1
the predcit u & v:(530.973337,482.573653)
the orign u & v in world
:(531.000000,484.000000)
test point index:2
the predcit u & v:(639.757701,468.574861)
the orign u & v in world
:(640.000000,468.000000)
test point index:3
the predcit u & v:(647.491900,332.448606)
the orign u & v in world
:(646.000000,333.000000)
test point index:4
the predcit u & v:(559.840202,194.248688)
the orign u & v in world
:(556.000000,194.000000)
The average error is 0.001939:
average error is smaller tha 0.1, is acceptable
C++程序


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 【译】Visual Studio 中新的强大生产力特性
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 【设计模式】告别冗长if-else语句:使用策略模式优化代码结构