SciTech-EECS-BigDataAIML: SVD(奇异值分解) + Eigenvalue Decomposition(特征值分解)
SciTech-EECS-BigDataAIML:
SVD(奇异值分解)
Singular Value(奇异值) 就是 Eigenvalue 的平方根.
SVD多种 Perspectives + Interpretations
-
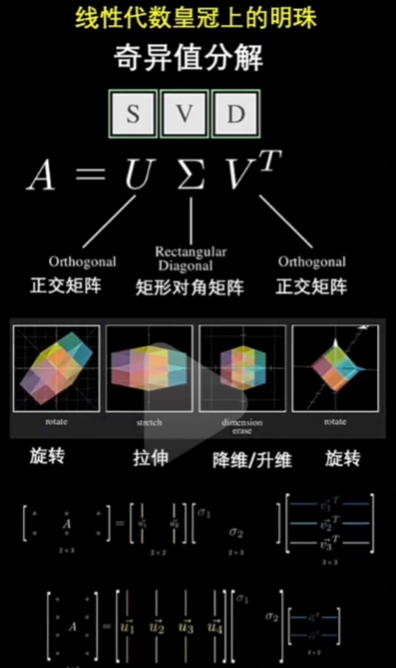
第一种 Perspective 是将 矩阵A 看作 "变换矩阵",
并作如下 Transformative Interpretation(变换式解读):
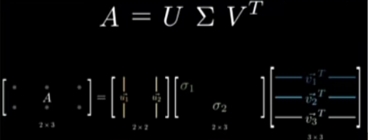
将 变换A 分解成分变换 U、∑、Vᵀ; ⇒ A = U∑Vᵀ -
第二张 Perspective 是将 矩阵A 本身结构 的 "标准化分解",
并作如下 Decompositive Interpretation(解构式解读):
将 矩阵A 标准化分解 成 多个1秩(Rank 为 1)矩阵的线性组合,
权重值序列 就是 特征值由大到小的排列。即LRA式Interpretation(解读)。
最典型的重要用途是 LRA(Low Rank Approximation, 低秩近似);
例如: 将任一张图片(m×n) 看作是一张巨大的矩阵,将其作LRA,
分解成 r(矩阵的秩)个 1秩矩阵 的 线性组合。
通过 删除/丢弃 一些 权重值(特征值)小 的1秩矩阵成份,
可以做: 成份分解、矩阵合成、图片无损或有损压缩,高精度近似等。![1000120693]()
![1000120694]()


SVD的 优势 和 分量的作用
SVD 具有多种优势,例如:
| 优势 | 说明 |
|---|---|
| 数值稳定性 | SVD 具有数值稳定性,可以处理病态矩阵。 |
| 最佳低秩近似 | SVD 提供矩阵的最佳低秩近似,使其成为降维的理想选择。 |
| 稳健性 | SVD 对数据中的微小扰动具有稳健性。 |
| 多功能性 | SVD 可以应用于任何矩阵,无论其性质如何。 |
SVD 分量具有特定的属性和作用,如下所示:
| 分量 | 说明 |
|---|---|
| U矩阵 | U 的列是 A 的左奇异向量。这些向量构成了A列空间的正交基。 |
| S(奇异值) | 的对角线元素是A的奇异值。这些值给出了A沿相应奇异向量作用的大小。 |
| VT矩阵 | VT的行是A的右奇异向量。这些向量构成了A行空间的正交基。 |
SVD 常用cases
SVD 是一个功能强大的线性代数主题,有多种应用,例如:
| 应用 | 说明 |
|---|---|
| 降维 | 在数据分析和机器学习,奇异值分解 (SVD) 用于在保留重要信息的同时减少维度。 |
| 图像压缩 | SVD 用于压缩图像,从而减少存储图像所需的数据量。 |
| 降噪 | SVD 可以通过识别和丢弃较小的奇异值,来滤除数据的噪声(作用较小的奇异值)。 |
| 信号处理 | 在信号处理上,SVD 用于分析和过滤信号。 |
| 推荐系统 | 推荐系统上使用 SVD 来预测用户偏好。 |
| 构造法:证实SVD可行 | SVD经典解法: 必然存在奇异值 |
SVD经典解法: 对AᵀA和AAᵀ作 PCA |
∑奇异值矩阵:谱化 谱化: 由大到小降序排列 |
|---|---|---|---|
 |
 |
 |
 |
| 证实SVD可行 | SVD经典解法: 必然存在奇异值 |
SVD经典解法: 对AᵀA和AAᵀ作 PCA |
∑奇异值矩阵:谱化 谱化: 由大到小降序排列 |
| A、A⁻¹、Aᵀ 一系列分解(带影响因子σᵢ) | 深化SVD(带σᵢ): 谱分解 | 深化SVD(带σᵢ)谱分解 | 深化SVD(带σᵢ)谱分解 |
|---|---|---|---|
 |
 |
 |
 |
| A、A⁻¹、Aᵀ 通用的(对任一A都适用) 一系列的SVD分解(带影响因子σᵢ) |
深化SVD(带影响因子σᵢ): 谱分解1 ① 任一矩阵 A 都可分解成 一系列谱矩阵(秩为1)的叠加 ②任一谱矩阵(秩为1)都是 同一个列(行)向量的线性组合 |
深化SVD(带影响因子σᵢ): 谱矩阵规律(可视化分析) "条带化本因" 是 每一uᵢυᵢ谱矩阵 : 秩都是1, uᵢ是列向量, υᵢ是行向量 |
深化SVD(带影响因子σᵢ): 谱矩阵规律(可视化分析) "条带化本因" 是 每一uᵢυᵢ谱矩阵 : 秩都是1, uᵢ是列向量, υᵢ是行向量 |
| SVD提供全新视角看待数据/矩阵 | SVD分解应用(带影响因子σᵢ): 可视分析 | 信号⇒数据⇒矩阵⇒SVD⇒谱矩阵系列可视分析 | SVD应用(带σᵢ): 只取主要部分实现数据压缩 |
|---|---|---|---|
 |
 |
 |
 |
| SVD提供全新视角看待数据/矩阵 | SVD分解应用(带影响因子σᵢ): 可视分析 | 信号⇒数据⇒矩阵⇒SVD⇒谱矩阵系列可视分析 | SVD分解应用(带影响因子σᵢ): 只取主要部分实现数据压缩 |
| SVD奇异值分解的 "σᵢ奇异值" | 深化SVD(带影响因子σᵢ): 谱分解1
① 任一矩阵 A 都可分解成
一系列谱矩阵(秩为1)的叠加
②任一谱矩阵(秩为1)都是
同一个列(行)向量的线性组合 | 深化SVD(带影响因子σᵢ):
每一uᵢυᵢ谱矩阵 : 秩都是1: 列向量乘行向量 | |
| |
SVD 线性代数皇冠👑上的明珠
熟知SVD, 可以使我们更深刻地理解"Matrix(矩阵)"的"代数结构"和"几何意义".
SVD(奇异值分解)不仅在科学、工程、机器学习 和 数据分析 等领域有非常重要的应用;
而且他把"Linear Algebra(线性代数)"的许多"核心概念"有机的联系在了一起. 例如:
- Rank: 秩
- Range: 像空间/列空间/范围
- Null Space: 零空间/核空间
- Eigenvalue: 特征值
- Eigenvector: 特征向量
- Transpose: 转置
- Inverse: 逆矩阵
- Symmetric Matrix: 对称矩阵
- Orthogonal Matrix: 正交矩阵
- PSD Matrix(Positive Semi Definite Matrix): 半正定矩阵
矩阵分解(矩阵因子分解)
矩阵分解(矩阵因子分解) 的一种方法, 即:
- 将 初始矩阵 表示成 “分解矩阵(两个或多个)”的乘积,
- 每个“分解矩阵”都是有 新结构 或 特殊性质的。类似于代数的因子分解
Eigenvalue Decomposition(特征值分解)
特征值分解 是 矩阵分解(矩阵因子分解) 的一种。
特征值分解的实质,是求解给定矩阵的 特征值和 特征向盘,提取出矩阵最重要的特征,
其中特征值分解公式 , 其中Q为特征向量矩阵, 是特征值对角阵。
- Eigenvalue Decomposition(特征值分解) 只适用于 的方阵 特征提取。
SVD(奇异值分解)
https://zhuanlan.zhihu.com/p/480389473
实际应用的数据对应的大部分矩阵可能不是方阵(如稀疏的有很多0), 就要提取主要特征;
- SVD(奇异值分解) 是将 任意较复杂矩阵 用 维度数更少, 更简单的“分解矩阵”的矩乘表示 ;
例如可用 3个分解矩阵 来描述 “变换矩阵”(高维度的目标矩阵) 的重要特性。 - 矩阵\(A_{m \times n}\)不是方阵, 我们不能求其特征值;
- 但对于矩阵 \(A^T A\) 和 \(A A^T\), 分别为\(n阶\)和\(m阶\)对称方阵:
它们的秩等同: \(R(A^T A) = R(A A^T )=R(A)\), 而且它们的 非零特征值的集合 也等同, - 对称矩阵 的 特征值矩阵 是 正交矩阵,特征值 都为 正实数; 因此可求出奇异值(特征值的平方根).


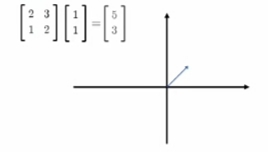
一个Matrix(矩阵)代表一个"线性变换"
-
一个矩阵代表一个“线性变换”
![]()
-
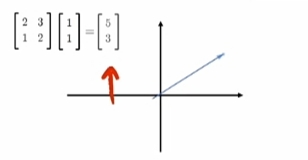
矩阵式线性变换:
-
对一个vector(向量)/natrix(矩阵)
“左乘”变换矩阵 就得到变换后的结果vector(向量)/natrix(矩阵).
![]()
-
当“变换矩阵”是“方阵(行数=列数)”时, 变换不改变"作用向量"的shape(维度);
\[\large A_{m \times m} \times X_{m \times n} = Y_{m \times n} \]
-
-
变换的“规范化”::
将“\(\large 变换矩阵A\)”规范化的分解成 三个 特殊类型的 分解变换矩阵:\[\large A_{m \times m} = U \sum V^{T} \] -
变换的“维度变化”
变换后的“结果矩阵”的“Rank(秩)”可能:- 同维: 等于 原vector(向量)/natrix(矩阵)的“Rank(秩)”:
- 降维: 小于 原vector(向量)/natrix(矩阵)的“Rank(秩)”,将(\(\large Rank(X)-Rank(Y)\))个维度变换为"自由维度";
这种降维变换,可以只保留“Top K 特征值”对应Top K的“特征向量”;
其实可看做: 其它(\(\large Rank(X)-Rank(Y)\))个“自由维度”的特征值为“0”(自由维度);
-
对 "源矩阵"(\(\large X\)) 作"(\(\large A\))变换 得到 "终矩阵""(\(\large Y\)):
每一个"向量/矩阵" 其实应当表示为“其本身”与“坐标基”的矩阵乘:
(\(\large X = X \times I\)
分解有两部分的变换:- 对 "空间单位(模长为1)坐标基"的变换, 旧"坐标基"为\(\large I\),新"坐标基"的"每一维度"的模长为1;
- 对 "向量新坐标值" 的变换: "源向量/矩阵" 投射到 新"坐标基"的"每一维度"上的"新坐标值(方向+模长)"的变换
![]()
SVD 应用实例 + 代码:
很多其它的机器学习算法也会用到SVD。使用线性代数时, 大多都要使用 SVD。SVD 不仅用在 PCA 、特征压缩(或数据降维)、图像压缩、数字水印、 推荐系统和文章分类、 LSA (隐性语义分析), 在信号分解/重构/降噪、数据融合、同标识别、目标跟踪、故障检测和神经网络等方面也有很好的应用.
矩阵压缩/降维
# -*- coding: utf-8 -*-
import numpy as np
from numpy import linalg as la
#1. SVD分解
A= [[1,1,3,6,1],[5,1,8,4,2],[7,9,2,1,2]]
A=np.array(A)
U,s,VT = la.svd(A)
# 为节省空间,svd输出s只有奇异值的向量
print('奇异值:',s)
# 根据奇异值向量s,生成奇异值矩阵
Sigma = np.zeros(np.shape(A))
Sigma[:len(s),:len(s)] = np.diag(s)
print("左奇异值矩阵:\n",U)
print('奇异值矩阵:\n',Sigma)
print('右奇异矩阵的转置:\n',VT)
#2.SVD重构
B = U.dot(Sigma.dot(VT))
print('重构后的矩阵B:\n', B)
print('原矩阵与重构矩阵是否相同?',np.allclose(A,B))
## 3. SVD矩阵压缩(降维)
for k in range(3,0,-1): # 3,2,1
# U的k列,VT的k行
D = U[:,:k].dot(Sigma[:k,:k].dot(VT[:k,:]))
print('k=',k,"压缩后的矩阵:\n",np.round(D,1)) # round取整数
- 代码一定要自己跑跑,SVD 得到的特征值的前两项较大,最后一项值较小;
- 取不同的k值, 分别对应于取 U的前 k列, 变成 k阶方阵,
- 取 前k行,对比利用 矩阵乘积得到的新矩阵 与原始矩阵 的情况,
- 对比结果, SVD 后 的 特征值 主要集中在前两个数上,即当 k取2时, 得到的新矩阵较近似; 大多数信息完好的. 因此,保留比较大的奇异值及特征向量,达到用较少数据量 达到较好的矩阵近似效果。
图像的数字化技术与矩阵的奇异值分解
将图形分解成象素的一个矩形的数阵,信息就可以用一个矩阵 $ A_r=(a_{ij})^{m \times n}$ 存储。
数字化图形存储量的压缩方法, 可用 矩阵的奇异值分解 和 矩阵范数 的近似。
对数字图像矩阵\(A_r\) 作 SVD(奇异值分解) , 压缩是取一个$ rank=k (k<r)$的矩阵 \(A_k\) 近似。
奇异值分解的展开形式
- 存储 \(A_k\) 只要存储\(k\)个奇异值, \(k个m维向量 u_i\) 和 \(n维向量v_j\)的所有分量, 共计 \(k(1+m+n)\) 个元素。
- 如果\(m=n=1000\), 存储原矩阵\(A_r\)需要存储\(1000 \times 1000\)个pixel。
矩阵 \(A_k\) 取 \(k=100\) 时, 近似图象已非常清晰, 存储量仅 100(2000+1)=200100个pixel。
和矩阵 \(A_r\) 比较,存储量减少了80%。
案例2--图像压缩
# -*- coding: utf-8 -*-
from itertools import count
from PIL import Image
import numpy as np
def img_compress(img,percent):
U,s,VT=np.linalg.svd(img)
Sigma = np.zeros(np.shape(img))
Sigma[:len(s),:len(s)] = np.diag(s)
# 根据压缩比 取k值
# 方法1 # k是奇异值数值总和的百分比个数,(奇异值权重)
count = (int)(sum(s))*percent
k = -1
curSum = 0
while curSum <= count:
k+=1
curSum += s[k]
# 方法2
# k = (int)(percent*len(s)) # k是奇异值个数的百分比个数
# 还原后的数据D
D = U[:,:k].dot(Sigma[:k,:k].dot(VT[:k,:]))
D[D<0] = 0
D[D>255] = 255
return np.rint(D).astype('uint8')
# 图像重建
def rebuild_img(filename,percent):
img = Image.open(filename,'r')
a = np.array(img)
R0 = a[:,:,0]
G0 = a[:,:,1]
B0 = a[:,:,2]
R = img_compress(R0,percent)
G = img_compress(G0,percent)
B = img_compress(B0,percent)
re_img = np.stack((R,G,B),2)
# 保存图片
newfile = filename+str(percent*100)+'.jpg'
Image.fromarray(re_img).save(newfile)
img = Image.open(newfile)
img.show()
rebuild_img('test.jpg',0.6)
代码一定要动手跑,对比结果

 浙公网安备 33010602011771号
浙公网安备 33010602011771号