FreeRTOS
MDK移植FreeRTOS及多任务创建
1.手动移植FreeRTOS(STM32F103)
解压得到FreeRTOS源码
1)把FreeRTOSv9.0.0\FreeRTOS\Demo\CORTEX_STM32F103_Keil目录下的FreeRTOSConfig.h放到source下
2)FreeRTOSv9.0.0\FreeRTOS\Source\portable\IAR目录下的ARM_CM3复制到keil文件中
3)然后随意打开一个工程,进行移植。先添加文件夹命名为FreeRtos,向FreeRtos中加源文件
源文件清单路径如下:
FreeRTOS\Source\list.c
FreeRTOS\Source\tasks.c
FreeRTOS\Source\portable\Keil\ARM_CM3\port.c
FreeRTOS\Source\portable\MemMang\heap_4.c
FreeRTOS\Source\FreeRTOSConfig.h

添加头路径:

2.多任务创建
学习FreeRTOS原理,在STM32下完成一个基于FreeRTOS的多任务程序,执行3个周期性task,具体任务不限,但建议如下:task1,每间隔500ms闪烁(变化)一次LED;task2,每间隔2000ms,向串口发送一次指令数据“helloworld!";task3,每间隔5000ms,从AHT20采集一次温湿度数据(不考虑硬件情况,仅写出整个多任务框架模拟代码)。
1.在这里直接打开野火提供的代码SRAM动态创建多任务
2.对main.c代码进行一点修改
main.c代码
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_usart.h"
/* 创建任务句柄 */
static TaskHandle_t AppTaskCreate_Handle = NULL;
/* LED1任务句柄 */
static TaskHandle_t LED1_Task_Handle = NULL;
/* LED2任务句柄 */
static TaskHandle_t LED2_Task_Handle = NULL;
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED1_Task(void* pvParameters);/* LED1_Task任务实现 */
static void HelloWorld_Task(void* pvParameters);/* LED2_Task任务实现 */
//static void AHT20_Task(void* pvParameters);//温湿度数据采集
static void BSP_Init(void);/* 用于初始化板载相关资源 */
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("第一次上机实验内容!\r\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED1_Task, /* 任务入口函数 */
(const char* )"LED1_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED1_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED1_Task任务成功!\r\n");
/* 创建HelloWorld_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )HelloWorld_Task, /* 任务入口函数 */
(const char* )"HelloWorld_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&LED2_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建HelloWorld_Task任务成功!\r\n");
// 创建AHT20_Task任务
//xReturn = xTaskCreate((TaskFunction_t )AHT20_Task, /* 任务入口函数 */
// (const char* )"AHT20_Task",/* 任务名字 */
// (uint16_t )512, /* 任务栈大小 */
// (void* )NULL, /* 任务入口函数参数 */
// (UBaseType_t )3, /* 任务的优先级 */
// (TaskHandle_t* )&LED2_Task_Handle);/* 任务控制块指针 */
//if(pdPASS == xReturn)
// printf("创建AHT20_Task任务成功!\r\n");*/
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
static void LED1_Task(void* parameter)
{
while (1)
{
LED1_ON;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_ON\r\n");
LED1_OFF;
vTaskDelay(500); /* 延时500个tick */
printf("LED1_Task Running,LED1_OFF\r\n");
}
}
static void HelloWorld_Task(void* parameter)
{
while (1)
{
vTaskDelay(2000);
printf("hello,world!!!!!!!!");
}
}
//static void AHT20_task(void* parameter)
//{
//温湿度采集代码体
//}
static void BSP_Init(void)
{
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
USART_Config();
}
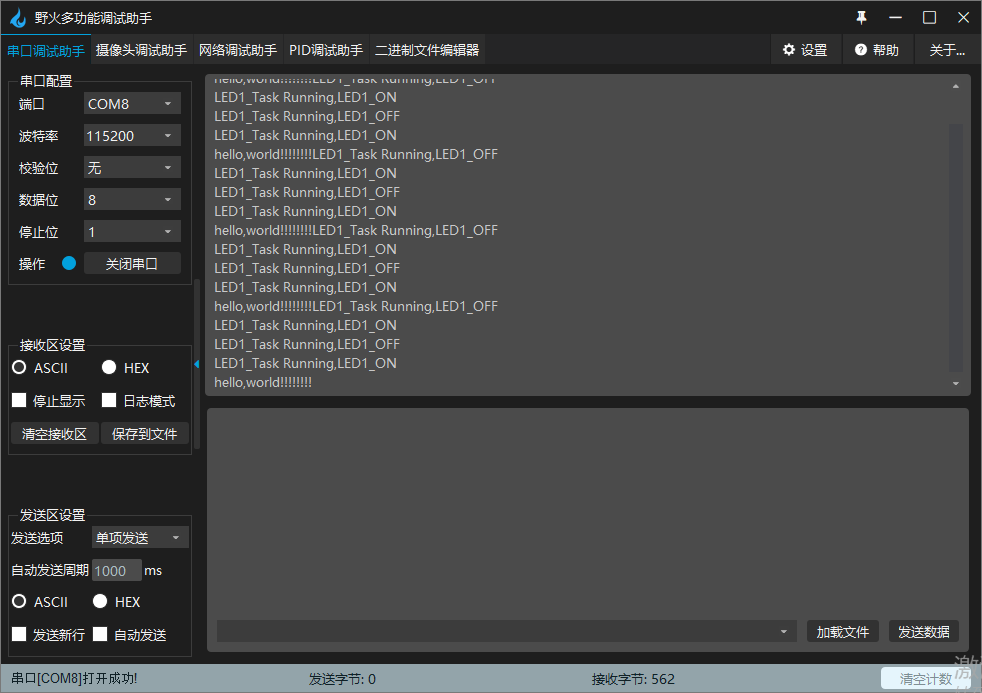
3.串口效果图
4.小灯闪烁效果