斜率优化
先言
\(ll\) : “有空给你们讲讲 。 ”
\(nj\) :“自己整理下学的。 ”
闲话不多说,只先谈一下斜率优化。
个人对于斜率优化浅显的理解就是以 \(DP\) 方程为基础,建立坐标系,同时通过以 \(DP\) 方程建立的函数,通过斜率以其单调性对这个状态进行精简,从而达到优化的目的
我们知道如果状态转移类似于这般 \(f_{j} = f_{i} + lots_j\) 状态转移方程,我们可以用单调队列进行优化,从而将 \(O(n^2)\) 的复杂度成功下调至 \(O(n)\) 的,优化幅度是很大的。但是如果 \(f_{j} = f_{i} + a_i \times b_j + c_i + d_j\) 很显然,由于 \(a_i \times b_j\) 的存在,我们是无法将 \(i,j\) 进行分离,也就是,我们无法用单调队列优化。但是这种我们是可以用斜率优化进行优化的 。
引入
状态转移方程
我不打算直接引入题目,我引入一个状态转移方程,我们来对其进行优化。
显然,我们将其化开,我们是得不到能用单调队列优化的影子的。 我们不妨设 \(j,k\) 两个决策点,我们假设 \(j\) 决策要比 \(k\) 决策优一些,我们就有
继续推导
我们直接将其化开
合并一下同类项
我们选择进行一下化简
如果 $j > k $
如果 $j < k $
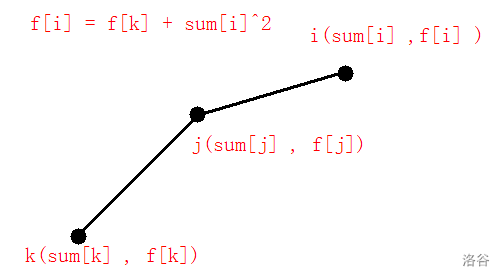
那么我们将 \(f_i + sum_i\) 看成 \(f(x)\) ,将 \(2\times i\) 看成 \(x\) ,那这个式子的左边也就发现 \(\frac{f(j) - f(k)}{j - k}\) , 那么我们就显然的可以看成,这个式子表示的是斜率呀。
那也就等价于
- \(j < k\) 并且 \(\frac{f(j) - f(k)}{j - k} < 2\times sum_i\) , 说明决策 \(j\) 更优一些 。
- \(j > k\) 并且 \(\frac{f(j) - f(k)}{j - k} <2\times sum_i\) , 说明决策 \(j\) 更优一些 。
感性理解就是,如果两个决策点的斜率小于 \(sum_i\) 那么就是靠后的决策点更优,否则就是靠前的更优。
假设几个量 :
- \(f_i\) 就是我们表示函数 \(f(i)\)
- \(sum_i\) (有时候可能手一抖写成 \(num_i\) ,还望见谅) 表示我们说的 \(x\)
- \(t\) 表示我们当前这个点 (也就是要求求解的点)
- \(i,j,k\) 表示 \(t\) 这个点转移的时候,可以从 \(i,j,k\) 这三个点进行转移 。
很显然我们是可以看得出, \(k < j < i\) 。
那么 他们与 \(s\times sum_t\) 有三种关系
-
\[\frac{f_j - f_k}{sum_j - sum_k} > \frac{f_i - f_j}{sum_i - sum_j} > 2\times sum_t \]
显然,此时 \(k\) 比 \(j\) 优 , \(j\) 比 \(i\) 优 。
-
\[\frac{f_j - f_k}{sum_j - sum_k} > 2\times sum_t > \frac{f_i - f_j}{sum_i - sum_j} \]
显然,此时 \(k\) 比 \(j\) 优, \(i\) 比 \(j\) 优
同时
显然 \(j\) 比 \(k\) 优, \(i\) 比 \(j\) 优。
所以,当这个 \(\vec{ji}\) 的斜率 > $ \vec{jk}$ 的斜率 ,并且 \(k < j < i\) , 这个时候, \(j\) 是不做状态转移的,也就是说,我们可以将 \(j\) 从决策集合中删除 。
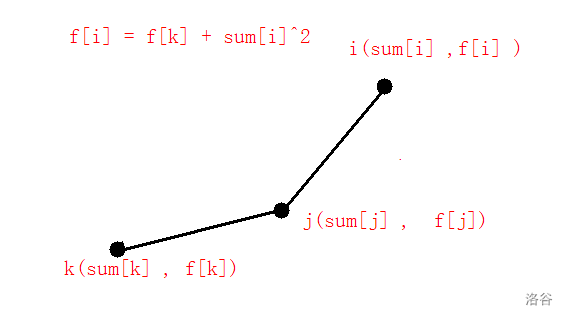
如果进行决策点是这样的,也就是一个下凸的,那么决策 \(j\) 是最优的。
可以得知 , 决策之间,斜率是递增,我们可以二分 。
所以我们二分斜率比 \(2\times sum_t\) 小的编号最大的点就是最优决策 。
如果不是递增的怎么办 ?
也是可以做的,但是难且麻烦,需要用到 \(CDQ\) 分治,或用平衡树维护凸包,笔者不会。
最后我们单调队列维护凸包,从单调队列中弹出那些不可能再合法的元素
例题1 P3195 [HNOI2008]玩具装箱
【description】 :
见题面
【solution】:
相信大家是能够推出状态转移方程的。这里状态转移就直接说了
对于 \(\sum_{k=j+1}^{i} c_k\) 我们是可以用 \(sum\) 数组进行一下预处理的,其实我们就得到了
我们将 \(sum_i + i\) 看做一个整体 \(t\) 那么我们同样可以化简得到式子
这样我们去直接展开这个式子要简单的多了。
我们仿照上面的例子,我们假设 \(j\) 这个决策点比 \(k(j< k)\) 更优一些。我们就可以得到
\(f_j + (t_i - t_j - 1 - L)^2 < f_k + (t_i - t_k - L - 1) ^ 2\)
继续化简我们就得到 .
\(continue\) 化简 得到
所以我们就得到了,由于 $ (t_i + 1 + L )^2$ 写起来实在是麻烦,我们用 \(G_i\) 来表示
\(2\times t_i \geq \frac{f_k + G_k - (f_j + G_j)}{t_k - t_j}\)
结合上面的证明,我们同时可以知道斜率是递增的。然后就 \(OK\) 了。
【Code】
例题2 P5785 [SDOI2012]任务安排
【description】 :
见题面
【solution】:
这个状态是十分好设计的。 我们设 \(f_i\) 表示以 \(i\) 为结束任务的最小的费用。那么我们就有状态转移
来解释一下该状态转移方程 。
\(S\times\sum_{k=j+1}^{n}c_k\) 表示的是开机一次 \(S\) 的给出的贡献。
\(T_i \times \sum_{k=j+1}^{i}c_k\) 表示完成任务 \(k\) 的贡献。
我们定义以下变量 :
- \(sumc\) 表示钱数的前缀和
- \(sumt\) 表示时间的前缀和
预计复杂度 \(O(n^2)\) ,很显然,这道题是过不了的,我们考虑直接展开,便于寻找性质
我们发现,这个状态转移出现了 \(sumt_i \times sumc_j\) 这个乘积的形式,我们考虑一下是否能进行斜率优化。我们设 \(j,k(j < k)\) 两个决策点,同时决策点 \(j\) 比决策点 \(k\) 要更优以一些,我们就有
我们继续化简
移项
然后我们就因为 \(j < k , \therefore sumc_j < sumc_k\)
然后我们就发现,可完全可以进行斜率优化了。又 \(\because |t_i| \leq 2^8\) 所以,不满足单调性了,也就是说,我们不能够用单调队列优化DP了,但是我们还是可以用单调队列储存一下决策点,同时我们直接二分找到我们的所需要转移的决策点。
【Code】
【CF311B Cats Transport】
【descriprion】:
见题面
【solution】:
对于每一只猫,如果想要接走他,我们发现,就是从 \(T_i - \sum_{j=1}^{H_i} d_j\) 的时刻出发,才能接到它,同时这个时候猫是不需要等待的。
以下是一些变量的解释 :
- \(cat_i\) 表示的是接上第 \(i\) 只猫,我们需要从 \(cat_i\) 的时刻出发
- \(f_{i,j}\) 表示的前 \(i\) 个饲养员带走了 \(j\) 只猫,猫的最小等待和。
我们预处理出 \(cat\) 数组,根据贪心策略,我们可以知道铲屎官带走的猫必然是带走的是一段连续的区间的猫
我就是一开始并不知道这个结论,我 \(TM\) 就是打不出来状态转移
首先我们说明一下 \(cat\) 数组的意义,我们让 \(T_i - \sum_{k=1}^{i}d_i\) 我们让这只猫玩耍的结束时间减去到达该点路程(根据这个速度,我们知道这样也算是时间),我们将相当于直接把这只猫平移到 \(1\) 号山丘上了,那么我们如果在 \(a_j\) 去接的话 , \(j\) 前面的必然已经玩耍完了(这里的 \(j\) 是根据 \(cat\) 数组排序得到的顺序) ,那么让猫多等一会必然会比猫少等一会更差,所以我们选择接上猫,显然答案会更优,所以,也就是说,接上的必然是一段连续区间的猫。
假设第 \(i\) 个铲屎官带走了 \(k + 1\to j\) 只猫,那么饲养员最早出发的时间就是 \(cat_j\) ,其他的猫,等待时间之和就是 \(\sum_{i=k}^{j} cat_j - cat_i\) ,也就是下边:
首先我们是可以用一个前缀和将两个 \(\sum\) 给优化掉的,那么我们式子就变成了。
所以我们就得到一个 \(O(m^2p)\)的做法,很显然这样是过不了的。我们考虑能否将状态转移转成 \(O(1)\) 的。
我们发现决策 \(k\) 与当前 \(cat_j\) 相乘,那么我们就容易想到斜率优化搞一下。
我们先将 \(\min\) 删去,保留 \(k\) ,搞一下
我们就得到
然后就有
我们以 \(k\) 这个决策作为自变量,将 \(f_{i-1,k} + sum_k\) 作为因变量,同样的,我们也是完全可以明白 \(cat_j\) 是作为斜率的吧。(不一定像上方一样,非要两个决策,这样也是可以的,毕竟这个式子不复杂,也就是不需要删去同类项,并且自带决策点)
使得截距最小,那就是维护一个下凸包。用单调队列维护即可。
因为我们已经将 \(cat\) 数组排好序了,也就是说,我们保证 \(cat\) 是单调递增的了,也就是斜率是单调递增的了,所以单调队列优化即可。
【Code】
小结
如果以后能碰上更有趣的斜率优化题目的话,会重新填坑,或者如果有机会学 \(CDQ\) 分治或者平衡树维护凸包的话,也会回来填坑的。毕竟笔者实在太菜 。
整体来说,斜率优化是比较套路化的,在推出状态转移方程的时候,我们得到决策点 \(k\) 与一个不知名的但是一个随着 \(i\) 变化而变化的量的时候,我们就选择用斜率优化进行优化,基本的模型已经在前面说了,这里还是再次赘述一下 \(f_{i} = \min(f_{j} + k_i \times a_i + c_i + d_j )\)
但是从上面做的三道题来说,最后一题,我反而认为状态转移是一个难点,我当时是没能够推导出来的。
题单
例题就不再赘述了
P4360 [CEOI2004]锯木厂选址
P3628 [APIO2010]特别行动队
P2120 [ZJOI2007]仓库建设
#10191. 「一本通 5.6 练习 4」打印文章
其他的题目后续加,这些都是类似于模板题的题目
鸣谢
玩具装箱题解
[算法]斜率优化
动态规划(DP)优化之斜率优化讲
告一段落了。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号