RISC-V MCU应用教程之赤菟V307多UART通信
本文章介绍使用CH32V307单片机实现主机轮回接收从机传输的数据,并在串口软件显示。
您需要的资料:CH32V307单片机数据手册及例程
一、单片机串口部分简介
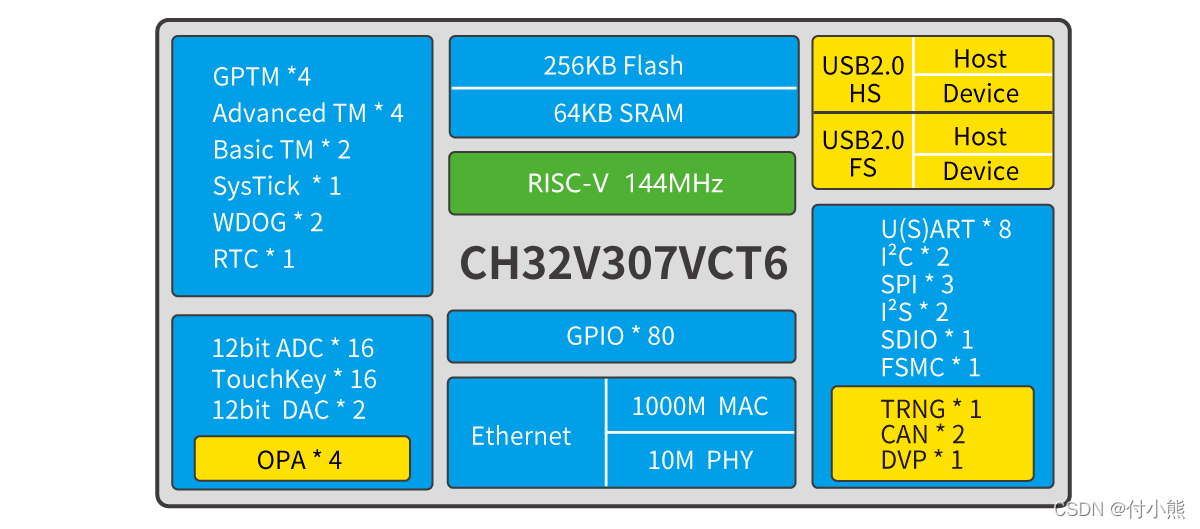
由上图可知,CH32V307有8个串口(USART+UART)。
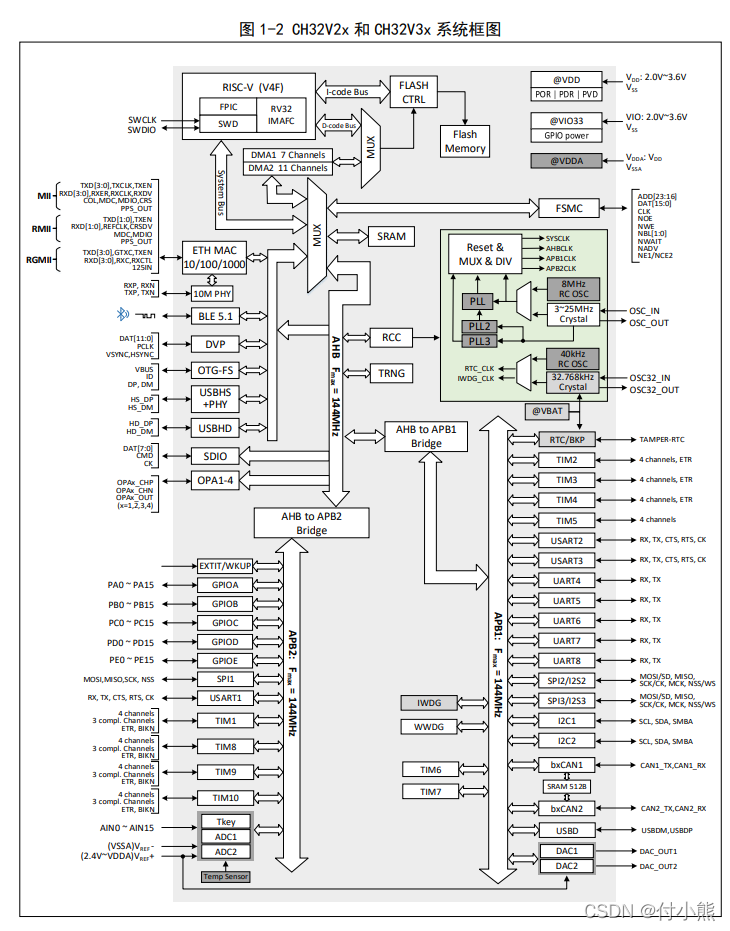
由数据手册可知,USART有3个,USART1挂接在APB2总线上,USART2和USART2以及7个UART挂接在APB1总线上。
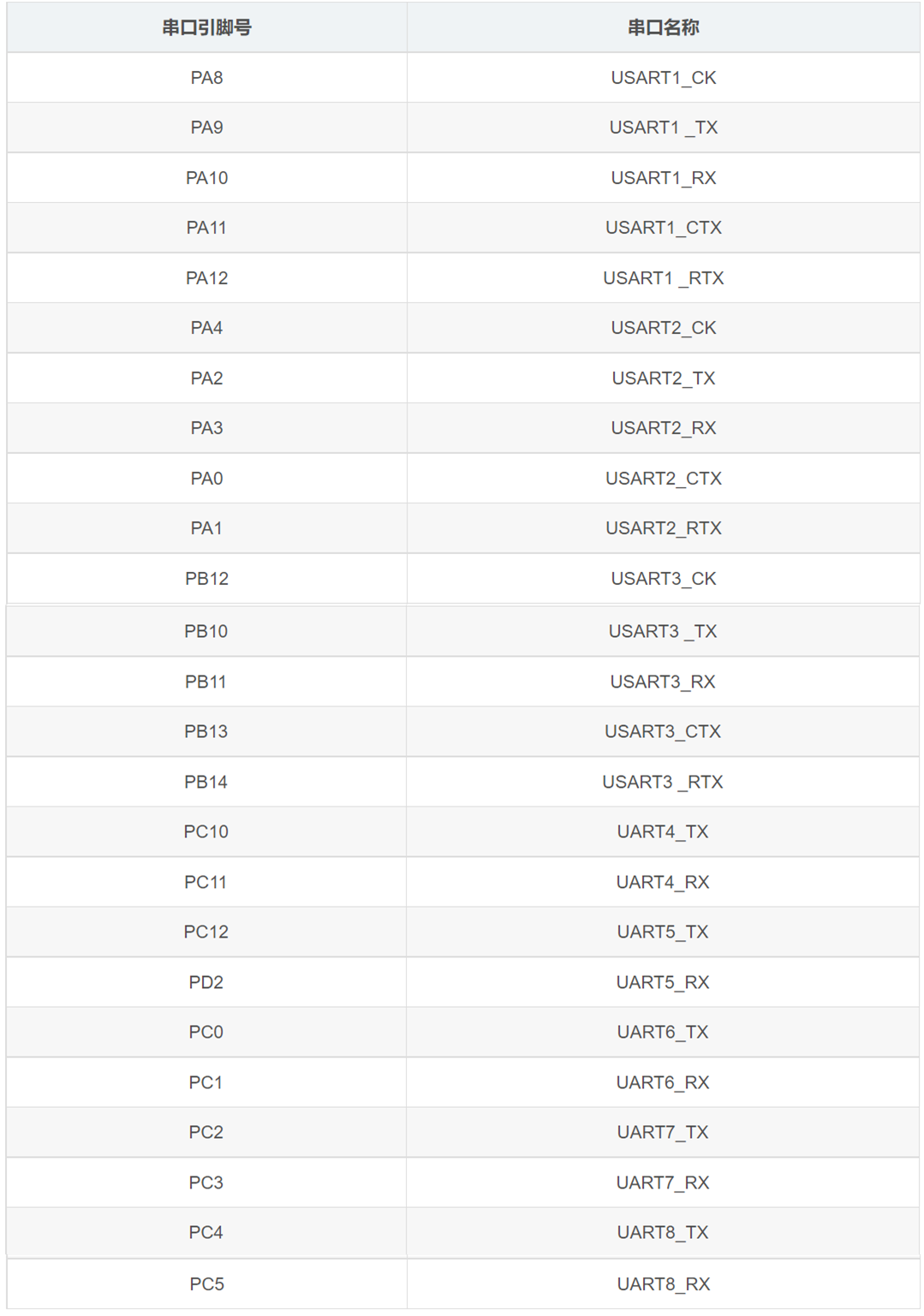
为了方便插拔引脚转接线,将数据手册中有关串口引脚陈列如下表格中。
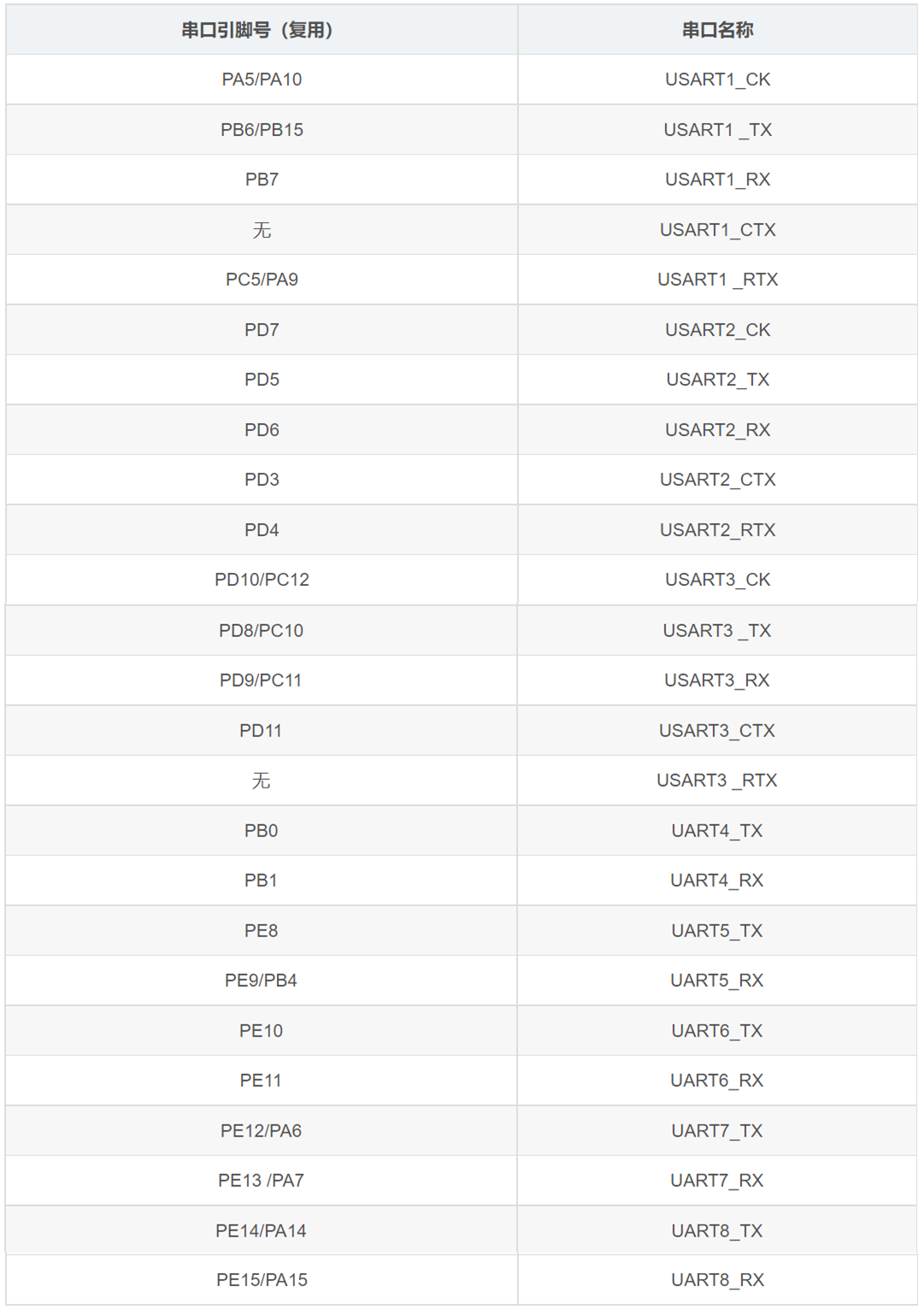
防止原有映射引脚被其它外设占用,手册中定义的串口复用引脚陈列如下。
二、通讯原理及实现
1. Master程序为采集数据单片机烧录,Slave程序为数据发送单片机烧录;
2. 主程序使6个串口中断周期性的开关,达到每次只接受一个Slave数据,达到周期性采集6个Slave数据的目的。最多可外接8路串口,本例程中USART1用来与PC串口通讯,UART8因器件不够暂未使用到。Slave均使用USART2,分别连接到Master剩余的6串口上。
3. 若Master指定采集第x个Slave数据,则需先发送一个数据0作为启动Slave发送数据的请求命令,Slave判定请求命令正确后,在进行数据的发送。这种协议的约定,保证了Master接收Slave数据的完整性。(在Master接收到Slave数据后,可将原数据返回Slave做校验,本程序暂未实现,请读者自行尝试)
4. 硬件连接如下,因为没有足够的usb供电,Slave取电为板载级联杜邦线方式。中间一块为Master采集板,周边六块为Slave数据发送板。
5. 程序如下
1 //双机通讯,使用USART 2 3 #include "debug.h" 4 5 /* Global define */ 6 #define TxSize1 (size(TxBuffer1)) 7 /* Global Variable */ 8 u8 RxBuffer1 = 0; /* Send by UART2 */ 9 u8 RequestData=0;//请求发送数据 10 u8 Rxfinish1 = 2;//先给个初始值,进入case 2,启动接收 11 //void USART1_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 12 void USART2_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 13 void USART3_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 14 void UART4_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 15 void UART5_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 16 void UART6_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 17 void UART7_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 18 //void UART8_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 19 20 /********************************************************************* 21 * @fn USARTx_CFG 22 * 23 * @brief Initializes the USART2 & USART3 peripheral. 24 * 25 * @return none 26 */ 27 void USARTx_CFG(void) 28 { 29 GPIO_InitTypeDef GPIO_InitStructure = {0}; 30 USART_InitTypeDef USART_InitStructure = {0}; 31 NVIC_InitTypeDef NVIC_InitStructure = {0}; 32 33 RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2|RCC_APB1Periph_USART3|RCC_APB1Periph_UART4|RCC_APB1Periph_UART5|RCC_APB1Periph_UART6|RCC_APB1Periph_UART7|RCC_APB1Periph_UART8, ENABLE); 34 // RCC_APB2PeriphClockCmd( RCC_APB2Periph_USART1, ENABLE); 35 RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE); 36 37 // /* USART1 TX-->A.9 RX-->A.10 */ 38 // GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; 39 // GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 40 // GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 41 // GPIO_Init(GPIOA, &GPIO_InitStructure); 42 // GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; 43 // GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 44 // GPIO_Init(GPIOA, &GPIO_InitStructure); 45 /* USART2 TX-->A.2 RX-->A.3 */ 46 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; 47 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 48 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 49 GPIO_Init(GPIOA, &GPIO_InitStructure); 50 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; 51 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 52 GPIO_Init(GPIOA, &GPIO_InitStructure); 53 /* USART3 TX-->B.10 RX-->B.11 */ 54 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; 55 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 56 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 57 GPIO_Init(GPIOB, &GPIO_InitStructure); 58 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; 59 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 60 GPIO_Init(GPIOB, &GPIO_InitStructure); 61 /* UART4 TX-->C.10 RX-->C.11 */ 62 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; 63 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 64 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 65 GPIO_Init(GPIOC, &GPIO_InitStructure); 66 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; 67 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 68 GPIO_Init(GPIOC, &GPIO_InitStructure); 69 /* UART5 TX-->C.12 RX-->D.12 */ 70 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; 71 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 72 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 73 GPIO_Init(GPIOC, &GPIO_InitStructure); 74 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; 75 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 76 GPIO_Init(GPIOD, &GPIO_InitStructure); 77 /* UART6 TX-->C.0 RX-->C.1 */ 78 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; 79 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 80 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 81 GPIO_Init(GPIOC, &GPIO_InitStructure); 82 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; 83 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 84 GPIO_Init(GPIOC, &GPIO_InitStructure); 85 /* UART7 TX-->C.2 RX-->C.3 */ 86 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; 87 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 88 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 89 GPIO_Init(GPIOC, &GPIO_InitStructure); 90 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; 91 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 92 GPIO_Init(GPIOC, &GPIO_InitStructure); 93 // /* UART8 TX-->C.4 RX-->C.5 */ 94 // GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; 95 // GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 96 // GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 97 // GPIO_Init(GPIOC, &GPIO_InitStructure); 98 // GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; 99 // GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 100 // GPIO_Init(GPIOC, &GPIO_InitStructure); 101 102 USART_InitStructure.USART_BaudRate = 115200; 103 USART_InitStructure.USART_WordLength = USART_WordLength_8b; 104 USART_InitStructure.USART_StopBits = USART_StopBits_1; 105 USART_InitStructure.USART_Parity = USART_Parity_No; 106 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; 107 USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; 108 109 // USART_Init(USART1, &USART_InitStructure); 110 // USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); 111 USART_Init(USART2, &USART_InitStructure); 112 USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);//初始化全部关闭 113 USART_Init(USART3, &USART_InitStructure); 114 USART_ITConfig(USART3, USART_IT_RXNE, DISABLE); 115 USART_Init(UART4, &USART_InitStructure); 116 USART_ITConfig(UART4, USART_IT_RXNE, DISABLE); 117 USART_Init(UART5, &USART_InitStructure); 118 USART_ITConfig(UART5, USART_IT_RXNE, DISABLE); 119 USART_Init(UART6, &USART_InitStructure); 120 USART_ITConfig(UART6, USART_IT_RXNE, DISABLE); 121 USART_Init(UART7, &USART_InitStructure); 122 USART_ITConfig(UART7, USART_IT_RXNE, DISABLE); 123 // USART_Init(UART8, &USART_InitStructure); 124 // USART_ITConfig(UART8, USART_IT_RXNE, DISABLE); 125 126 // NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; 127 // NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 128 // NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 129 // NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 130 // NVIC_Init(&NVIC_InitStructure); 131 NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; 132 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 133 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 134 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 135 NVIC_Init(&NVIC_InitStructure); 136 NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; 137 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 138 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 139 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 140 NVIC_Init(&NVIC_InitStructure); 141 NVIC_InitStructure.NVIC_IRQChannel = UART4_IRQn; 142 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 143 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 144 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 145 NVIC_Init(&NVIC_InitStructure); 146 NVIC_InitStructure.NVIC_IRQChannel = UART5_IRQn; 147 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 148 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 149 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 150 NVIC_Init(&NVIC_InitStructure); 151 NVIC_InitStructure.NVIC_IRQChannel = UART6_IRQn; 152 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 153 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 154 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 155 NVIC_Init(&NVIC_InitStructure); 156 NVIC_InitStructure.NVIC_IRQChannel = UART7_IRQn; 157 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 158 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 159 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 160 NVIC_Init(&NVIC_InitStructure); 161 // NVIC_InitStructure.NVIC_IRQChannel = UART8_IRQn; 162 // NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 163 // NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 164 // NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 165 // NVIC_Init(&NVIC_InitStructure); 166 167 // USART_Cmd(USART1, ENABLE); 168 USART_Cmd(USART2, ENABLE); 169 USART_Cmd(USART3, ENABLE); 170 USART_Cmd(UART4, ENABLE); 171 USART_Cmd(UART5, ENABLE); 172 USART_Cmd(UART6, ENABLE); 173 USART_Cmd(UART7, ENABLE); 174 // USART_Cmd(UART8, ENABLE); 175 } 176 /********************************************************************* 177 * @fn main 178 * 179 * @brief Main program. 180 * 181 * @return none 182 */ 183 int main(void) 184 { 185 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); 186 Delay_Init(); 187 USART_Printf_Init(115200); 188 USARTx_CFG(); /* USART2 & USART3 INIT */ 189 190 printf("DATA RECEIVED START! \r\n"); 191 192 //USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); 193 while(1) 194 { 195 196 switch (Rxfinish1) 197 { 198 // case 1: 199 // printf("DATA RECEIVED FROM USART1 :%s\r\n",RxBuffer1); 200 // Rxfinish1=0; 201 // USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); 202 203 // break; 204 case 2: 205 printf("DATA RECEIVED FROM SLAVE_2 :%p\r\n",RxBuffer1);//打印Slave发送来的数据 206 USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启下一个Slave中断,准备接受数据 207 USART_SendData(USART3, RequestData);//发送准备好接受命令请求,Slave收到校验后,就开启发送 208 while(USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET); 209 Delay_Ms(100);//给slave时间组织发送,时间太短会重新进入case 2. 210 break; 211 case 3: 212 printf("DATA RECEIVED FROM SLAVE_3 :%p\r\n",RxBuffer1); 213 USART_ITConfig(UART4, USART_IT_RXNE, ENABLE); 214 USART_SendData(UART4, RequestData); 215 while(USART_GetFlagStatus(UART4, USART_FLAG_TXE) == RESET); 216 Delay_Ms(100); 217 break; 218 case 4: 219 printf("DATA RECEIVED FROM SLAVE_4 :%p\r\n",RxBuffer1); 220 USART_ITConfig(UART5, USART_IT_RXNE, ENABLE); 221 USART_SendData(UART5, RequestData); 222 while(USART_GetFlagStatus(UART5, USART_FLAG_TXE) == RESET); 223 Delay_Ms(100); 224 break; 225 case 5: 226 printf("DATA RECEIVED FROM SLAVE_5 :%p\r\n",RxBuffer1); 227 USART_ITConfig(UART6, USART_IT_RXNE, ENABLE); 228 USART_SendData(UART6, RequestData); 229 while(USART_GetFlagStatus(UART6, USART_FLAG_TXE) == RESET); 230 Delay_Ms(100); 231 break; 232 case 6: 233 printf("DATA RECEIVED FROM SLAVE_6 :%p\r\n",RxBuffer1); 234 USART_ITConfig(UART7, USART_IT_RXNE, ENABLE); 235 USART_SendData(UART7, RequestData); 236 while(USART_GetFlagStatus(UART7, USART_FLAG_TXE) == RESET); 237 Delay_Ms(100); 238 break; 239 case 7: 240 printf("DATA RECEIVED FROM SLAVE_7 :%p\r\n",RxBuffer1); 241 USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); 242 USART_SendData(USART2, RequestData); 243 while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET); 244 Delay_Ms(100); 245 break; 246 // case 8: 247 // printf("DATA RECEIVED FROM UART8 :%p\r\n",RxBuffer1); 248 // Rxfinish1=0; 249 // Delay_Ms(500); 250 // USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); 251 // USART_SendData(USART3, RequestData); 252 // while(USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET); 253 // break; 254 default: 255 printf("DATA RECEIVED error%p\r\n"); 256 Delay_Ms(500); 257 USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); 258 break; 259 } 260 261 } 262 } 263 264 /********************************************************************* 265 * @fn USART3_IRQHandler 266 * 267 * @brief This function handles USART3 global interrupt request. 268 * 269 * @return none 270 */ 271 //void USART1_IRQHandler(void) 272 //{ 273 // if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) 274 // { 275 // RxBuffer1 = USART_ReceiveData(USART1); 276 // USART_ITConfig(USART1, USART_IT_RXNE, DISABLE); 277 // Rxfinish1 = 1; 278 // } 279 280 //} 281 282 void USART2_IRQHandler(void) 283 { 284 if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) 285 { 286 RxBuffer1 = USART_ReceiveData(USART2); 287 USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);//关闭此中断 288 Rxfinish1 = 2; 289 } 290 291 } 292 293 void USART3_IRQHandler(void) 294 { 295 if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) 296 { 297 RxBuffer1 = USART_ReceiveData(USART3); 298 USART_ITConfig(USART3, USART_IT_RXNE, DISABLE); 299 Rxfinish1 = 3; 300 } 301 302 } 303 304 void UART4_IRQHandler(void) 305 { 306 if(USART_GetITStatus(UART4, USART_IT_RXNE) != RESET) 307 { 308 RxBuffer1 = USART_ReceiveData(UART4); 309 USART_ITConfig(UART4, USART_IT_RXNE, DISABLE); 310 Rxfinish1 = 4; 311 } 312 313 } 314 315 void UART5_IRQHandler(void) 316 { 317 if(USART_GetITStatus(UART5, USART_IT_RXNE) != RESET) 318 { 319 RxBuffer1 = USART_ReceiveData(UART5); 320 USART_ITConfig(UART5, USART_IT_RXNE, DISABLE); 321 Rxfinish1 = 5; 322 } 323 324 } 325 326 void UART6_IRQHandler(void) 327 { 328 if(USART_GetITStatus(UART6, USART_IT_RXNE) != RESET) 329 { 330 RxBuffer1= USART_ReceiveData(UART6); 331 USART_ITConfig(UART6, USART_IT_RXNE, DISABLE); 332 Rxfinish1 = 6; 333 } 334 335 } 336 337 void UART7_IRQHandler(void) 338 { 339 if(USART_GetITStatus(UART7, USART_IT_RXNE) != RESET) 340 { 341 RxBuffer1 = USART_ReceiveData(UART7); 342 USART_ITConfig(UART7, USART_IT_RXNE, DISABLE); 343 Rxfinish1 = 7; 344 } 345 346 } 347 348 //void UART8_IRQHandler(void) 349 //{ 350 // if(USART_GetITStatus(UART8, USART_IT_RXNE) != RESET) 351 // { 352 // RxBuffer1 = USART_ReceiveData(UART8); 353 // USART_ITConfig(UART8, USART_IT_RXNE, DISABLE); 354 // Rxfinish1 = 8; 355 // } 356 // 357 //}
6. Slave程序
1 //双机通讯,使用USART 2 3 #include "debug.h" 4 /* Global Variable */ 5 u8 TxBuffer2 = 6;//这是发送的数据,可以分别配置Slave为不同的值 6 u8 RequestData=0;//检测请求命令是否正确 7 u8 RxBuffer2=0; 8 u8 Rxfinish2; 9 void USART2_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast"))); 10 /********************************************************************* 11 * @fn USARTx_CFG 12 * 13 * @brief Initializes the USART2 & USART3 peripheral. 14 * 15 * @return none 16 */ 17 void USARTx_CFG(void) 18 { 19 GPIO_InitTypeDef GPIO_InitStructure = {0}; 20 USART_InitTypeDef USART_InitStructure = {0}; 21 NVIC_InitTypeDef NVIC_InitStructure = {0}; 22 23 RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2, ENABLE); 24 RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE); 25 26 /* USART2 TX-->A.2 RX-->A.3 */ 27 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; 28 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 29 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 30 GPIO_Init(GPIOA, &GPIO_InitStructure); 31 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; 32 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; 33 GPIO_Init(GPIOA, &GPIO_InitStructure); 34 35 USART_InitStructure.USART_BaudRate = 115200; 36 USART_InitStructure.USART_WordLength = USART_WordLength_8b; 37 USART_InitStructure.USART_StopBits = USART_StopBits_1; 38 USART_InitStructure.USART_Parity = USART_Parity_No; 39 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; 40 USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; 41 42 USART_Init(USART2, &USART_InitStructure); 43 USART_ITConfig(USART2, USART_IT_RXNE, ENABLE); 44 45 NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; 46 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; 47 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; 48 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; 49 NVIC_Init(&NVIC_InitStructure); 50 USART_Cmd(USART2, ENABLE); 51 } 52 53 /********************************************************************* 54 * @fn main 55 * 56 * @brief Main program. 57 * 58 * @return none 59 */ 60 int main(void) 61 { 62 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); 63 Delay_Init(); 64 USART_Printf_Init(115200); 65 USARTx_CFG(); /* USART2 & USART3 INIT */ 66 67 68 while(1) 69 { 70 if(RxBuffer2==RequestData)//校验数据请求命令 71 { 72 USART_SendData(USART2, TxBuffer2);//向Master发送数据 73 while(USART_GetFlagStatus(USART2, USART_FLAG_TXE) == RESET); 74 } 75 76 } 77 } 78 79 void USART2_IRQHandler(void) 80 { 81 if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)//等待接受Master数据请求命令 82 { 83 RxBuffer2 = USART_ReceiveData(USART2); 84 85 } 86 }
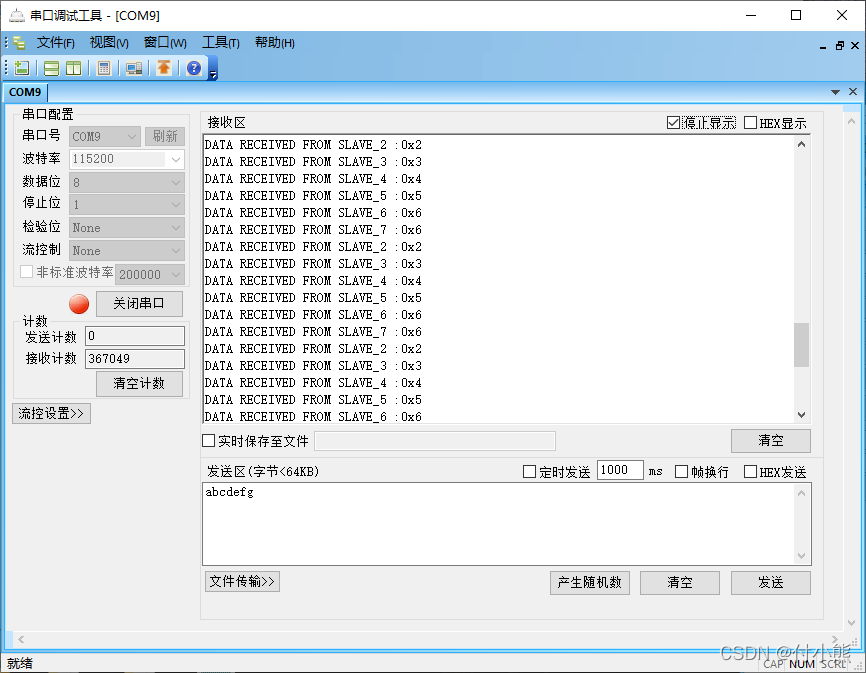
注:主机先上电,从机再上电,否则数据接收混乱,正在处理这个问题。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号