
路径规划(2)——栅格地图
1、地图类型
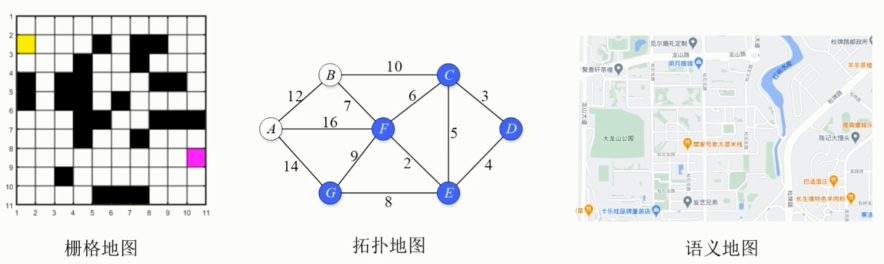
尺度地图:具有真实的物理尺寸,如 栅格地图、特征地图、点云地图,常用于地图构建、定位、SLAM、小规模路径规划。
拓扑地图:不具备真实的物理尺寸,只表示不同地点的连通关系和距离,如铁路网,常用于大规模的机器人路径规划。
语义地图:加标签的尺度地图,SLAM和深度学习的结合,常用于人机交互。
2、栅格地图表示方式
- 本栏路径规划利用矩阵(二维数组)来表示栅格地图(因为对于矩阵,无论MATLAB、C++还是Python,矩阵更适合数组的表达,更便于编程。)
- 矩阵表示地图与传统意识中坐标X,Y有所区别
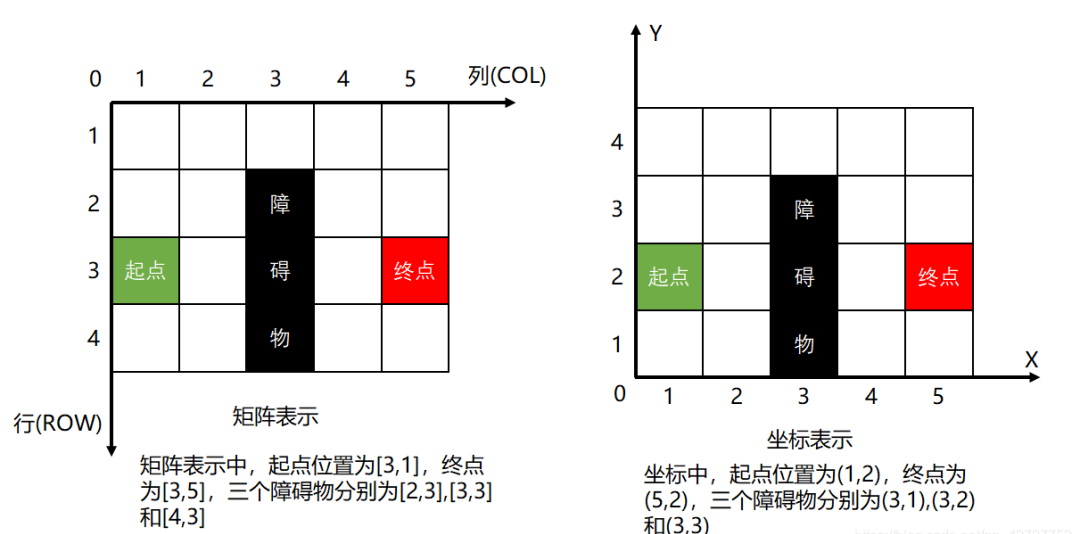
如图所示的地图,在矩阵表示中,起点位置为[3,1],终点为[3,5],三个障碍物分别为[2,3],[3,3]和[4,3]。在坐标表示中,起点位置为(1,2),终点为(5,2),三个障碍物分别为(3,1),(3,2)和(3,3)
- 矩阵表示地图还可以用线性索引来简化,这样将矩阵的二维数组表示成一位数组,编程更方便。
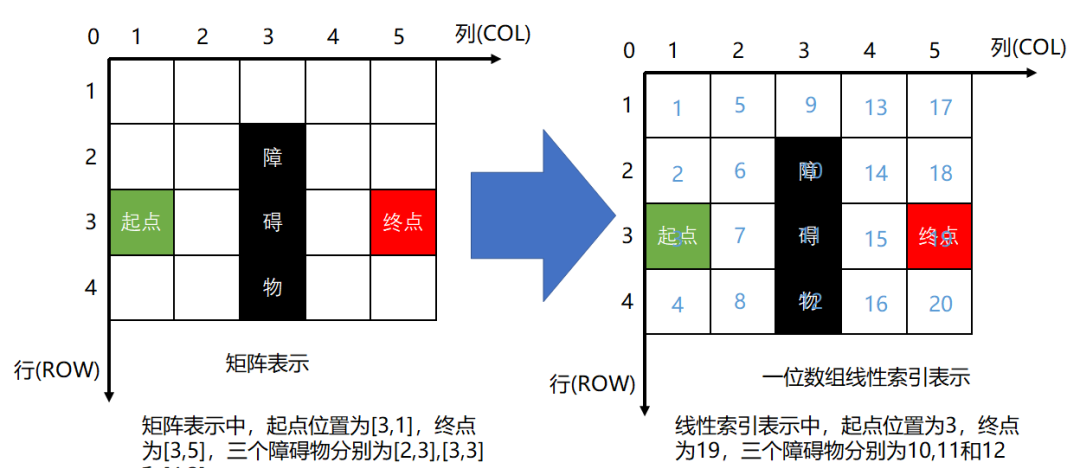
线性索引,是从第一列开始,沿着行按顺序增长,然后从第二列开始…,是竖着沿行增长的,而非横着沿着列增长。理解记忆有点类似于Excel表格按行递增。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号