斜率优化
斜率优化是将一类 \(O(n^2)\) 的 DP 状态转移优化至 \(O(n \log n)\) 甚至 \(O(n)\) 的方法。
用一个 atcoder dp contest 的最后一题来讲解:
dp_z Frog-3
https://atcoder.jp/contests/dp/tasks/dp_z
题意:有 \(n\) 个石头,一只青蛙初始站在第 \(1\) 块上。它可以执行若干次以下操作:
- 跳到第 \(j(i < j \le n)\) 块石头上,并花费 \((h_i - h_j) ^ 2 + c\) 的代价。
求青蛙到达第 \(n\) 块石头的最小代价。
\(2 \le n \le 2 \times 10^5, 1 \le c \le 10^{12}, \mathbf{1 \le h_1 < h_2<...<h_n\le 10^6}\)
分析:
令 \(dp_i\) 表示走到第 \(i\) 块石头的最小代价。
不难写出状态转移方程:
也就是找到在这个式子 \(dp_i = dp_j + (h_j - h_i)^2 + c\) 中使得 \(i\) 最小的 \(j\)。
为了使用斜率优化,我们需要将其转化为 \(y = kx + b\) 的形式,其中 \(x\) 和 \(y\) 是只和 \(j\) 有关的式子,\(k\) 是只和 \(i\) 有关(已知)的式子。而 \(b\) 和 \(dp_i\)(未知)有关,需要最小化。也就是说,在平面上分布有若干个点 \((x_j, y_j)\),需要找到一个点,使得经过这个点的直线与 \(y\) 轴的交点最小。(截距最小)
即:
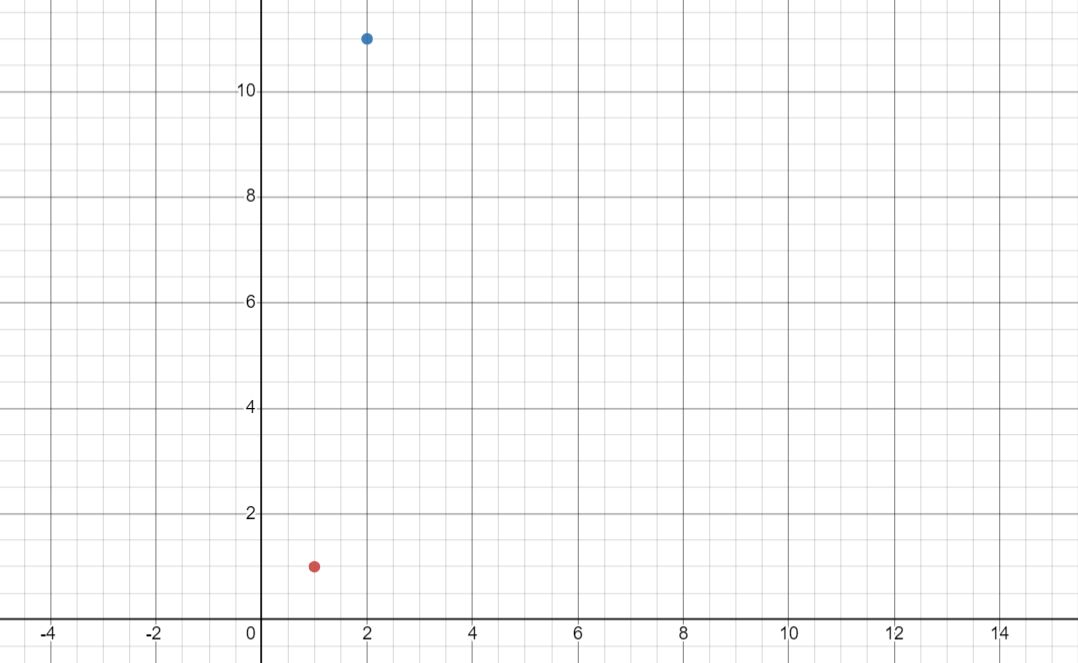
例如这个题目假设 \(h_1 = 1,h_2 = 2\),我们求出了 \(dp_1 = 0, dp_2 = 7\),那么平面上分布有两个点 \((x_1,y_1)=(1,1)\) 和 \((x_2,y_2)=(2,11)\):
现在要求出 \(dp_3\),并且 \(h_3 = 3\)。以 \(2h_3=6\) 为斜率,画出两条线,分别是 \(j=1\) 和 \(j=2\) 时候对应的线:
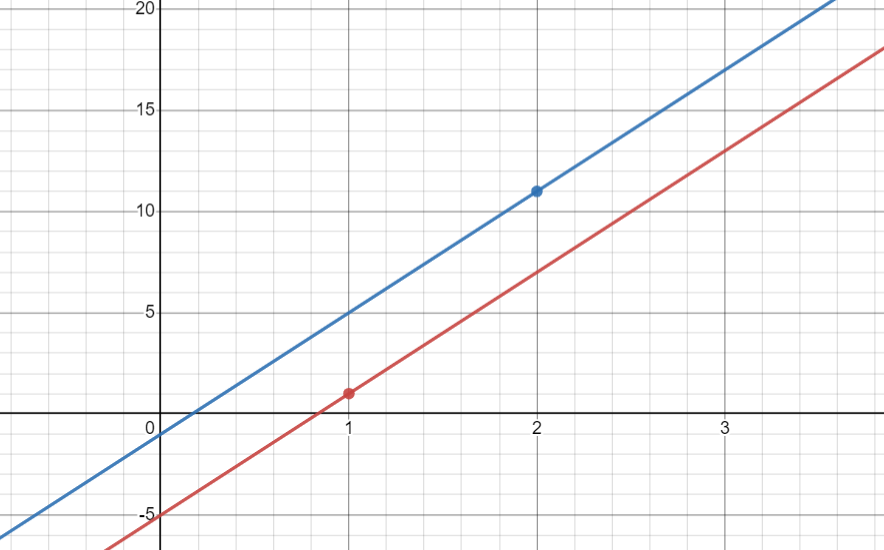
可以发现是 \(j=1\) 的时候斜率更小,因此更优的决策点应该是 \(j=1\)。
咱们连接一下这两个点,会发现因为两个点的斜率比 \(k_3\) 大,所以第一个点是最优决策点。如果换一个斜率比两点之间斜率大的点,那么第二个点会变成最优决策点。
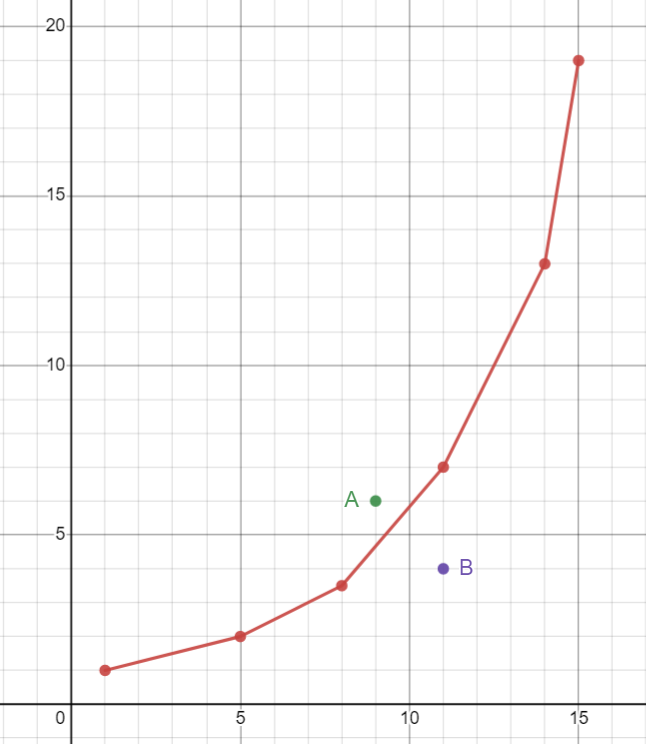
再往外探索,发现如果三个点长成下图这样,那么 \(B\) 点一定不会是最优决策点:
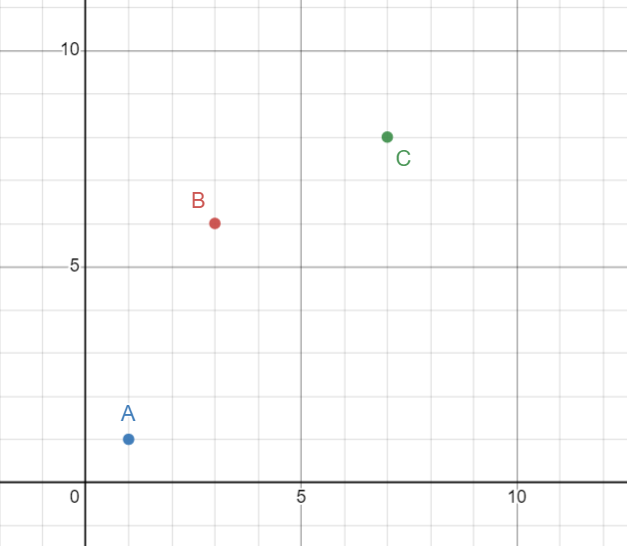
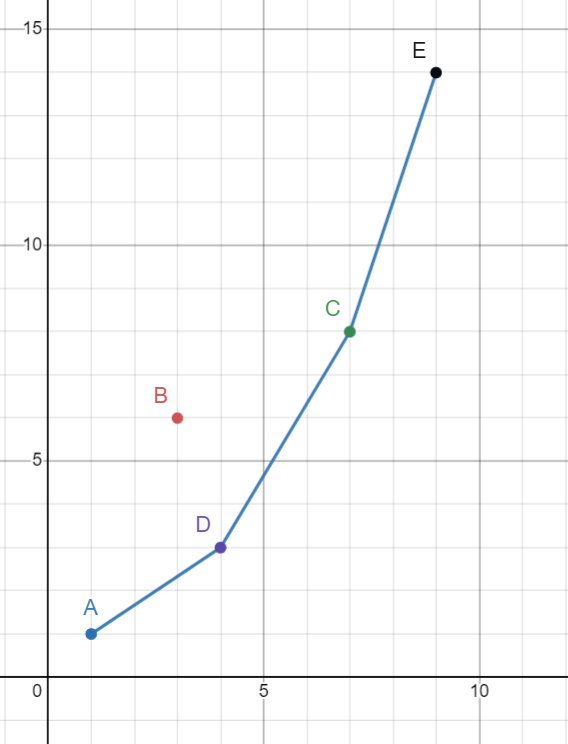
因为 \(k_{AB} > k_{BC}\),或者说,\(B\) 不在凸包上。那么我们考虑维护一个凸包(下凸壳),即若干个点的集合,其中每相邻两个点的斜率依次递增。如下图,凸包就是 \(\{A,D,C,E\}\)。
当我们想要求一个新的直线 \(y = k_px + b\) 的最优决策点时(决策点不止一个,也就是凸包必然包含两个以上点的时候),需要找到点 \(i\) 使得 \(k_{i-1,i} < k\) 且 \(k_{i,i+1} > k\)。(这里如果不存在这样的点,那么如果 \(k_{12}>k\) 那么 \(1\) 是最优决策点,如果 \(k_{m-1,m} < k\) 那么 \(m\) 是最优决策点(\(m\) 为现有凸包大小))这个可以使用二分做到。
算完 \(p\) 的 \(dp\) 值,在队尾加入这个新点的时候,为了维护凸包不断弹出队首直到:\(k_{m-1,m} < k_{m,(x_p,y_p)}\) 或 \(m=1\)(\(m\) 为现有凸包大小)
如此这样算下去,我们就做完了整个 DP 过程,时间复杂度 \(O(n \log n)\)。
一般化的使用场景
对于
(即 \(y_j = -k_ix_j + dp_i - b_i\))
其中 \(R_i\) 是 递增序列,\(x_j\) 是递增序列时可以使用斜率优化将 \(O(n^2)\) 的转移优化至 \(O(n \log n)\)。
要点
- 比较斜率时,应使用十字相乘法,避免精度丢失。
- 应将初始元素先放进凸包去,如这题的 \(dp_1 = 0\),就应该放进 \((h_1,h_1^2)\);
- 可以用 \(O(n^2)\) 的暴力对拍。
- 在“一般化的使用场景”下,当 \(k\) 有单调性的时候,可以不用二分查找,例如 \(k\) 单调增的话,每次直接删除队头的元素直到 \(k_{1,2}>k\),因为如果 \(k_{1,2} < k\),之后更不会用到第 \(1\) 个点做最优决策点。然后直接取队头元素即可。\(k\) 单调减的话取队首即可,相类似。此时的复杂度可以优化到 \(O(n)\)。
- “一般化的使用场景”还可以继续扩展:
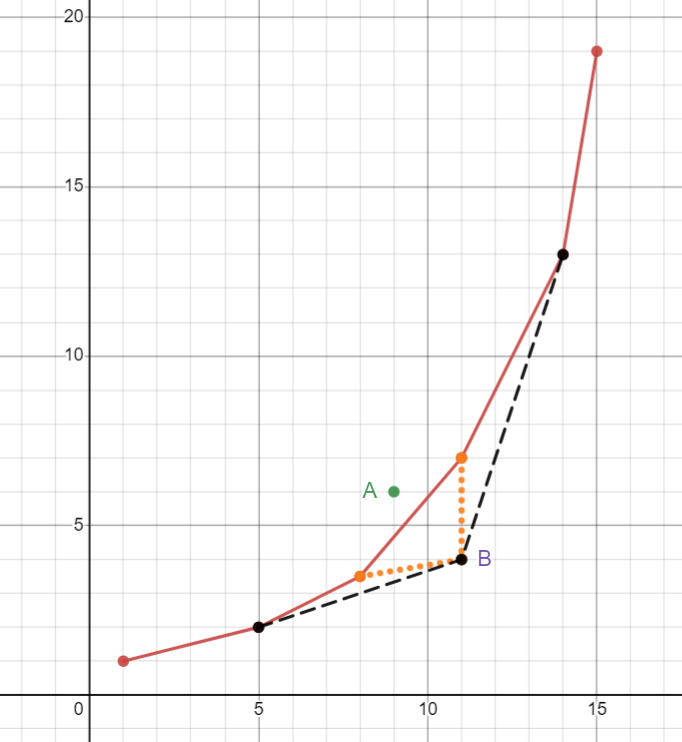
如果 \(x_j\) 不是单调递增序列,那么相当于是要在凸包的中间插入点。如下图:
这时需要使用一个平衡树维护,以 \(x\) 为第一关键字:
我们首先判断这个点在不在凸包上。找到左边和右边的点,看看斜率是否是左边大于右边。如果不是的话(例如点 \(A\))那么它不在凸包上,不需要插入。
如果是的话,那么需要找到左边和右边的后继节点,分别在平衡树上二分,判定条件是左边的斜率小于右边的斜率。如下图,黑色的边是新的凸包中的边。
时间复杂度 \(O(n \log n)\)。
如果 \(R\) 不是单调递增序列,写主席树+线段树二分,等作者水平提高再来学习。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号