最大流与二分图匹配
1 最大流问题
1.1 基本概念
原网络:不存在反向边(这是一种简化的理解方式,比较严谨的理解方式是对任意两个点定义的一个二元函数 \(f(u, v) \rightarrow R\),满足 \(f(u, v) \le c(u, v)\),两个方向中其中一个的 \(c\) 是 \(0\))。
残量网络:对某个可行流 \(f\) 的残量网络为 \(G_f\),存在反向边。
最大流问题:找最大可行流。
两个构成要素:
流量守恒:经过一个点(除了源点和汇点之外)的流量定义为从这个点流出的流量减去流入这个点的流量,它需要为 \(0\)。
容量限制:流过一条边的流量必须在 \(0 \sim c_{edge}\) 范围内。
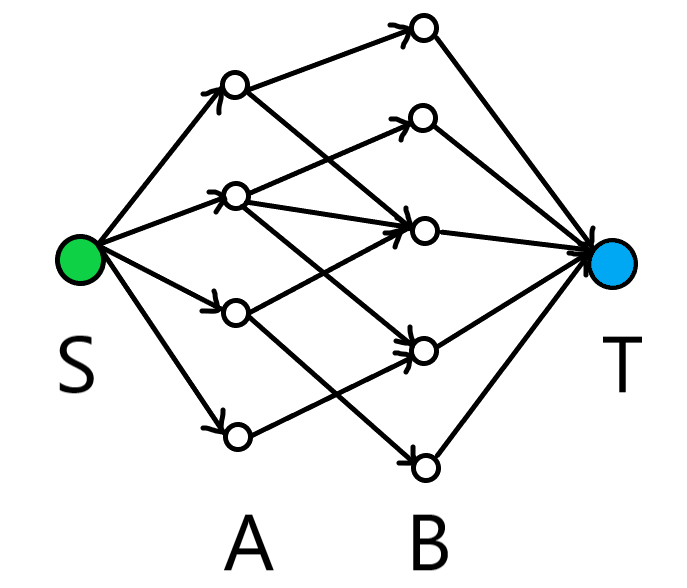
割:将网络流的点集分为两个部分 \(S\) 和 \(T\),源点在第一部分,汇点在第二部分。其划分结果即为一个割。
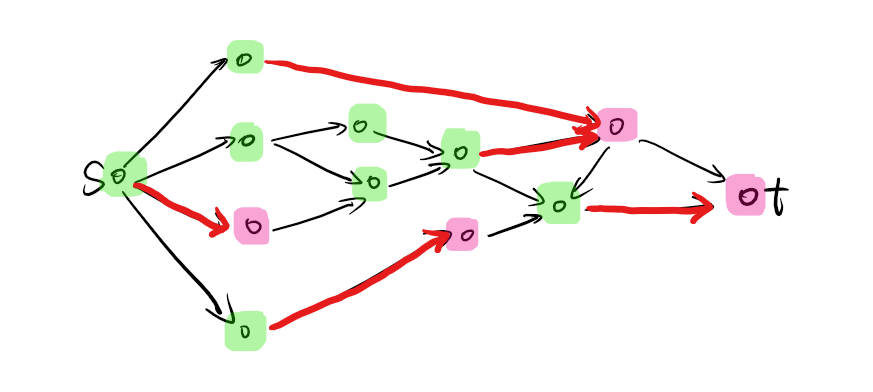
割的容量:所有从 \(S\) 连向 \(T\) 的边的容量之和。
如图所示即为一个割,标出了 \(S\),\(T\) 以及算在割的容量里面的边。
有 \(2^{n-2}\) 种割。每一个从 \(S\) 流向 \(T\) 的流都会至少流经一条割边(中值定理)。
1.2 割的一些性质
最大流最小割定理:最大可行流流量等于最小割容量。
这个东西画图之后很直观理解:如果在最大流的每一个瓶颈上面画一个割边的话,那么该割容量就等于最大流流量;如果不是瓶颈,那么割容量会更大;如果是一个流被算了好多次,那么割容量也会更大;如果没有流满,那么流量会变小。
还有一个支持找最大流的重要定理:增广路定理,内容是最大流与残量网络没有增广路等价。
以下给出两个结论的证明:
如下三个条件知一推二:
- 可行流 \(f\) 是原图 \(G\) 的最大流。
- \(f\) 的残量网络没有增广路。
- 存在一个割 \((S,T)\) 使得 \(|f| = c(S, T)\)。
证明:
1 -> 2. 反证法,正向很好证明。
3 -> 1. 容易证明任意一个可行流流量 \(\le\) 任意一个割容量。也很好证明。
2 -> 3. 从起点开始经过残量网络中满流边 BFS 得到的连通块设为 \(S\) 即可。
因此我们证明了两个重要的结论。没有增广路就是最大流也不难理解,其本质是因为残量网络的存在使得如果有更大的流 \(f'\) 一定存在 \(f' - f\) 这个流。
其他割性质:
-
如果某一个边是最小割的割边,它一定是满流边/关键边,那么其满足关键边的性质,把若干条边串联之后这些边最多会割一条。
-
建图的时候不让割某条边,可以怎么做:从其起点向终点连一条容量 inf 的边,那么割这条边的话还需要割新加入边,否则割这条边没有意义,所以这条边不会割掉。
-
依据最大流建立的最小割,满足 \(S\) 到 \(T\) 的任何一条路径上有且仅有一条割边。(这是集合划分模型的一个前置定理)
1.3 FF 增广路算法
增广路:一条从源点到汇点的路,使得流这一条路可以使流量增加。
我们通过不断寻找增广路,并对其进行增广、加反向边直到不存在增广路,来寻找最大流。(最大流最小割定理)
于是我们有了暴力的算法:FF 增广路算法。该算法每次 DFS 寻找增广路,并对增广到的路线进行更新流量。注意这些算法中存图存的都是残量网络,有反向边的;存的边权是容量,不是流量。流量也就是增广路上边最大流量的最小值,可以边增广边记录。建反边,回溯即可。
建反边:链式前向星存图,一次存两条边,每次取成对异或变换即可。
时间复杂度:设最大流为 \(f\)。则最多有 \(f\) 次 DFS 操作。\(O(fE)\)。
1.4 EK 增广路算法
发现上一个时间复杂度里有 \(f\),考虑消除之。原因是因为 FF 算法太死脑筋了,非要等现在节点水灌满了,才会灌其他的(明明有一个更大的水管不灌)。
考虑将 DFS 换成 BFS,时间复杂度 \(O(min(Vf, VE^2))\)。(这个复杂度很松,用下面的板子一般来说可以跑 \(1000 \sim 10000\) 的 \(n\)。
#include<bits/stdc++.h>
using namespace std;
#define int long long
#define f(i, a, b) for(int i = (a); i <= (b); i++)
#define cl(i, n) i.clear(),i.resize(n);
#define endl '\n'
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int, int> pii;
const int inf = 1e9;
int cnt = 0;
int n,m,s,t;
int head[1010],nxt[20010],mxf[20010],to[20010],flow[1010],lst[1010];
void add(int u, int v, int w){
nxt[cnt]=head[u];to[cnt]=v;mxf[cnt]=w;head[u]=cnt;
++cnt;
}
bool bfs(){
queue<int> q;
memset(flow,0x3f,sizeof(flow)); memset(lst,-1,sizeof(lst));
q.push(s);
while(!q.empty()){
int u=q.front();q.pop(); if(u == t) break;
for(int i = head[u]; i != -1; i = nxt[i]) {
int v = to[i],w=mxf[i];
if(w>0&&v!=s&&lst[v]==-1){
flow[v]=min(flow[u],w); lst[v]=(i^1); q.push(v);
}
}
}
return (lst[t] != -1);
}
int ek(){
int maxflow = 0;
while(bfs()){
maxflow += flow[t];
for(int i = lst[t]; i != -1; i = lst[to[i]]) {
mxf[i] += flow[t]; mxf[(i ^ 1)] -= flow[t];
}
}
return maxflow;
}
signed main() {
ios::sync_with_stdio(0);
cin.tie(NULL);
cout.tie(NULL);
//think twice,code once.
//think once,debug forever.
cin >> n >> m >> s >> t; f(i,1,n)memset(head,-1,sizeof(head));
f(i,1,m) {int u,v,w;cin>>u>>v>>w;add(u,v,w);add(v,u,0);}
cout<<ek()<<endl;
return 0;
}
测试:\(n=1000,m=10000\) 只跑了 \(88ms\)。
实现的时候可以改成使用 vector 存边的标号,会快一些,然后仔细一点最好不要把 to[id] 和 id 写错啥的,很难调。
1.5 Dinic 算法
可以进一步优化常数。
Dinic 算法的本质是爆搜,每次不只是搜一条路径,而是把一个残量网络中所有增广路径一起搜出来。但是可能会出现绕远路/绕环的现象,怎么办呢?我们对图跑一遍 BFS,处理出每个点和源点的距离,在搜的时候只从前一层往后一层搜。
(如果你知道咖啡店在你的东侧,你只会向东边的方向走才能尽快到达)
具体而言,这个层数是 BFS 树上的层数。BFS 的时候,是不是每个点只会经过一次?这一次的层数也就是它在 BFS 树上的层数。
这个层数建立之后,显然有一个性质,层数为 \(i\) 的点只会连向层数为 \(\le i + 1\) 的点(这点和 DFS 树不一样)。并且如果有向汇点的通路,一定有至少一条边连向层数为 \(i+1\) 的点。我们把这些边构成的导出子图,作为这次扩展的域。
然后在图上 DFS,不断寻找增广路(只需要有边权就行,不要求最大)直到没有为止。然后进行下一次 BFS。
BFS 的时候如果没法连到汇点了,就返回。
时间复杂度是 \(O(V^2E)\) 的(只需要记结论就好了,证明试试看能否看懂。加了以下几个优化之后,是依旧很松的上界,一般可以跑 \(10000 \sim 100000\) 的数据)
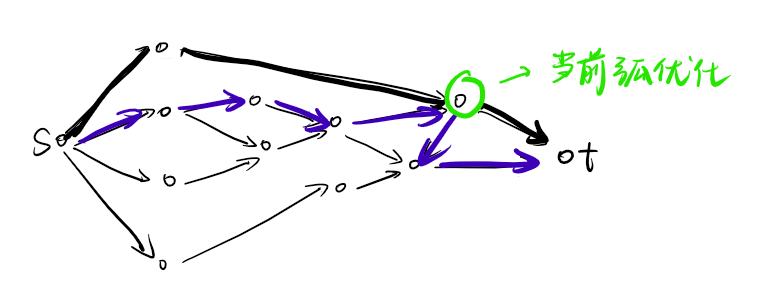
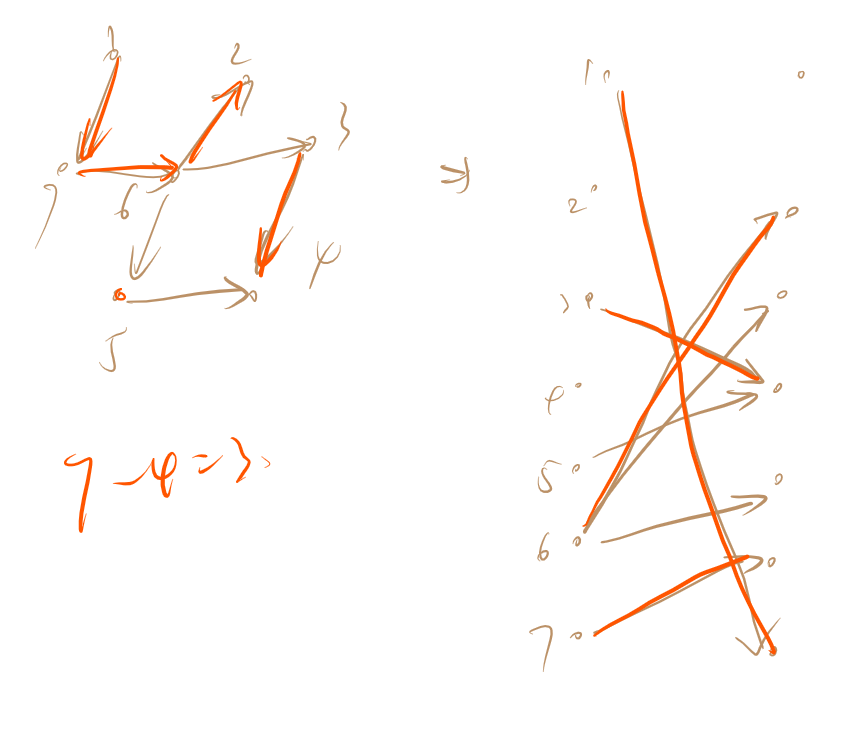
当前弧优化:我们走到一个点的时候,正常是按照邻接表的顺序遍历一遍它的邻边。假设我们在一条残量网络中从 \(s\) 沿一条路径走到节点 \(v\),这条路的最大流量是 \(limit\)。走过了 \(v\) 的第 \(1\) 条边之后又走到了第 \(2\) 条边,那么第 \(1\) 条边的容量一定小于 \(limit\),那么在加上这一次增广路之后的残量网络中第 \(1\) 条边一定不会被增广,下一次可以直接从第 \(2\) 条边搜索。(需要注意的是虽然第 \(2\) 条边被搜索过,但是这一条边不一定流满了,下次还需要搜)。因此我们记录当前弧 \(x_i\) 表示在第 \(i\) 个点时需要从什么位置开始搜索,我们搜到第几条边就把 \(x_i\) 更新为几。
注意当前弧在每次 BFS 时重置,否则退流没法处理。作用如下图,当蓝色的边经过绿点的时候直接跳过了已经走的黑色边。(假设已经流满了这条边,也就是说已经走到了下一条边。)
删点优化:DFS的时候我们的入口是 \(dfs(i,limit)\),返回的是从 \(i\) 到 \(t\),之前最大流量为 \(limit\)。如果返回的是 \(0\),那么从这个点到汇点没有路径了,这时候直接将其删除避免重复搜索。怎么删除?把层数设为 \(-1\) 即可。
满流剪枝:当流量已经 \(==limit\) 的时候就不需要继续搜索了。
这个算法一定要把板子记下来,很重要!一般都用这个板子。并且三个优化的细节都要记一下。
#include<bits/stdc++.h>
using namespace std;
#define f(i, a, b) for(int i = (a); i <= (b); i++)
#define cl(i, n) i.clear(),i.resize(n);
#define endl '\n'
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int, int> pii;
const int inf = 1e9;
int n, m, s, t; int cnt = 0;
int head[100010], nxt[2000010], to[2000010], c[2000010];
int d[100010]; int cur[100010]; //当前弧优化
void add(int u, int v, int w) {
nxt[cnt] = head[u], to[cnt] = v, c[cnt] = w; head[u] = cnt++;
nxt[cnt] = head[v], to[cnt] = u, c[cnt] = 0; head[v] = cnt++;
}
bool bfs() {
queue<int> q; memset(d, -1, sizeof d); d[s] = 0; q.push(s); cur[s] = head[s]; //当前弧初始值为head
while(!q.empty()) {
int u = q.front(); q.pop();
if(u == t) return 1;
for(int i = head[u]; ~i; i = nxt[i]) {
int v = to[i];
if(d[v] >= 0 || !c[i]) continue;
d[v] = d[u] + 1; cur[u] = head[u];
q.push(v);
}
}
return 0;
}
int find(int u, int limit) {
if(u == t) return limit;
int flow = 0;
for(int i = cur[u]; ~i && flow < limit/*满流剪枝*/; i = nxt[i]) {
cur[u] = i;
int v = to[i];
if(d[v] == d[u] + 1 && c[i]) {
int f = find(v, min(c[i], limit - flow));
if(!f) d[v] = -1;//删点优化
c[i] -= f; c[i^1] += f; flow += f;
}
}
return flow;
}
int dinic() {
int maxflow = 0, flow;
while(bfs()) while(flow = find(s, inf)) maxflow += flow;
return maxflow;
}
int main() {
ios::sync_with_stdio(0);
cin.tie(NULL);
cout.tie(NULL);
//think twice,code once.
//think once,debug forever.
cin >> n >> m >> s >> t; memset(head, -1, sizeof head);
f(i, 1, m) {int u, v, w; cin >> u >> v >> w; add(u,v,w);}
cout << dinic() << endl;
return 0;
}
1.6 最大流建模
可以用最大流建模的问题一般是找一个集合的最值,我们需要保证:
- 建图之后的每一个可行流和原问题每一个可行解是一一对应的。
那么,图的最大流就是原问题的最优可行解。
(和动态规划很像,都要靠直觉)
举个例子:二分图最大匹配问题。
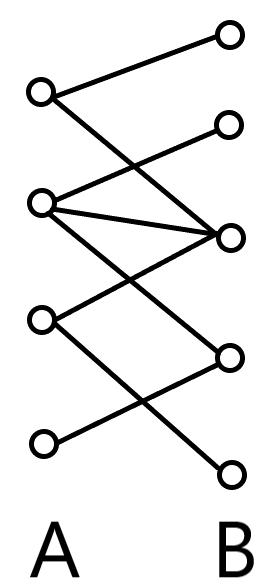
最大流模型中我们建立一个源点和汇点,并把源点向每一个 \(A\) 集合的点连一条容量为 \(1\) 的边;把每一个 \(B\) 集合的点向汇点连一条容量为 \(1\) 的边;\(A\) 集合和 \(B\) 集合之间的每一条边(原图上的边)容量都为 \(1\)。如下图:
考虑原图上的一个可行解 \(s\) 一定对应到网络中一个可行流 \(f\):(考虑流量守恒和容量限制是否满足)
当原图上两个点 \(u,v\) 通过边 \(e\) 匹配时,网络上存在边:\(s \rightarrow u,u \rightarrow v,v \rightarrow t\)。这时流量为 \(1\),等于原问题匹配个数。
考虑网络上一个可行流 \(f\) 一定对应到网络中一个可行解 \(s\):
对于网络上的容量限制,我们发现一个点只能被选中一次,只能连原图上的一条边。这也就是可行解的要求。注意该网络的流量可以有实数,所以我们需要加上一个限定:网络上整数值可行流的集合为原图上可行解的集合。由于我们的 Dinic 算法计算的时候一直使用整型变量,所以满足找到的都是整数值可行流。此时找到的就是整数值最大流等于原问题最优解,因此可以这样建模。
Dinic 更优秀地解决二分图最大匹配问题。
二分图最大匹配一般使用匈牙利算法,时间复杂度 \(O(VE)\),但是使用 Dinic 算法可以做到 \(O(E\sqrt V)\)。怎么理解呢?匈牙利算法相当于每次找一条增广路,相当于 FF 算法或 EK 算法,Dinic 比它快就很容易理解了。
如果要输出方案,由于最后剩下的是最大流的残量网络,所以可以考虑在残量网络上遍历原图上的每一条正向边(要搞清楚编号范围是什么),如果容量为 \(0\),那么代表这条边的流量为 \(1\),输出这两个点即可。
结论:dinic 算法在执行 \(k\) 轮之后增广路的长度都至少是 \(k\)。
1.7 多源汇和关键边
多源汇:有若干个 \(S\) 和若干个 \(T\),求最大流。
分析:直接建超源超汇即可。注意到最短路模型也可以这么做,并且不会退化时间复杂度,BFS 会变成 01BFS。
#include<bits/stdc++.h>
using namespace std;
#define int long long
#define f(i, a, b) for(int i = (a); i <= (b); i++)
#define cl(i, n) i.clear(),i.resize(n);
#define endl '\n'
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int, int> pii;
const int inf = 1e9;
#define cerr if(false)cerr
#define freopen if(false)freopen
#define watch(x) cerr << (#x) << ' '<<'i'<<'s'<<' ' << x << endl
void cmax(int &x, int y) {if(x < y) x = y;}
void cmin(int &x, int y) {if(x > y) x = y;}
//调不出来给我对拍!
int S,T,s[10010],t[10010],cnt=-1;int n,m,sc,tc;
int head[10010],to[300010],nxt[300010],cur[10010],cap[300010],dep[10010];
void add(int u,int v,int w){
nxt[++cnt]=head[u];to[cnt]=v;cap[cnt]=w;head[u]=cnt;
nxt[++cnt]=head[v];to[cnt]=u;cap[cnt]=0;head[v]=cnt;
}
bool bfs(){
memset(dep,-1,sizeof(dep));queue<int>q; q.push(S);cur[S]=head[S];dep[S]=0;
while(!q.empty()){
int now=q.front();q.pop();
for(int i=head[now];~i;i=nxt[i]){
if(cap[i]>0&&dep[to[i]]==-1){dep[to[i]]=dep[now]+1;q.push(to[i]);cur[to[i]]=head[to[i]];}
if(to[i]==T)return 1;
}
}
return 0;
}
int find(int now,int limit){
cerr<<now<<" "<<dep[now]<<" "<<limit<<endl;
if(now==T)return limit;
int flow=0;
for(int i=cur[now];~i&&flow<limit;i=nxt[i]){
cur[now]=i; if(dep[to[i]]!=dep[now]+1||cap[i]==0)continue;
int tmp=find(to[i], min(cap[i],limit-flow));
if(tmp==0)dep[to[i]]=-1;
flow+=tmp;cap[i]-=tmp;cap[i^1]+=tmp;
}
return flow;
}
int dinic(){
int flow=0,maxflow=0;
while(bfs()) {f(i, 0, n + 1){cerr<<dep[i]<<" ";}cerr<<endl;flow = find(S,inf); cerr<<flow<<endl; maxflow+=flow;}
return maxflow;
}
signed main() {
ios::sync_with_stdio(0);
cin.tie(NULL);
cout.tie(NULL);
//freopen();
//freopen();
//time_t start = clock();
//think twice,code once.
//think once,debug forever.
cin>>n>>m>>sc>>tc; memset(head,-1,sizeof(head));
f(i,1,sc)cin>>s[i]; f(i,1,tc)cin>>t[i];
S=0,T=n+1; f(i,1,sc)add(S,s[i],inf); f(i,1,tc)add(t[i],T,inf);
f(i,1,m){int u,v,w;cin>>u>>v>>w;add(u,v,w);}
cout<<dinic()<<endl;
//time_t finish = clock();
//cout << "time used:" << (finish-start) * 1.0 / CLOCKS_PER_SEC <<"s"<< endl;
return 0;
}
关键边:求有哪些边使得其增加容量可以导致最大流变大。
分析:考虑 \(s\) 到 \(u\) 有一条增广路径,\(v\) 到 \(t\) 有一条增广路径,并且 \(u\) 到 \(v\) 满流的话,\(u\) 到 \(v\) 是一条关键边。(注意求的是原图里的关键边,而不是残量网络里)
直接从 \(s\) 和 \(t\) 开始分别跑正向和反向 DFS 即可。
(可以记为\(s \rightsquigarrow u \rightarrow v \rightsquigarrow t\))
证明:首先如果并不满流,显然不行。其次满流的话是充要条件:若有这两条路径,这条边增加容量可以让其联通;否则增加这条边之后不论水想往哪里流出去一定会被堵住。
#include<bits/stdc++.h>
using namespace std;
#define int long long
#define f(i, a, b) for(int i = (a); i <= (b); i++)
#define cl(i, n) i.clear(),i.resize(n);
#define endl '\n'
typedef long long ll;
typedef unsigned long long ull;
typedef pair<int, int> pii;
const int inf = 1e9;
#define cerr if(false)cerr
#define freopen if(false)freopen
#define watch(x) cerr << (#x) << ' '<<'i'<<'s'<<' ' << x << endl
void cmax(int &x, int y) {if(x < y) x = y;}
void cmin(int &x, int y) {if(x > y) x = y;}
//调不出来给我对拍!
int cnt=-1;int n,m,S,T;
int head[550],from[12010],to[12010],nxt[12010],cap[12010],cur[550],dep[550];
void add(int u,int v,int w){
nxt[++cnt]=head[u];from[cnt]=u;to[cnt]=v;cap[cnt]=w;head[u]=cnt;
nxt[++cnt]=head[v];from[cnt]=v;to[cnt]=u;cap[cnt]=0;head[v]=cnt;
}
bool bfs(){
memset(dep,-1,sizeof(dep));queue<int>q;q.push(S);cur[S]=head[S];dep[S]=0;
while(!q.empty()){
int now=q.front();q.pop();
for(int i=head[now];~i;i=nxt[i]){
if(cap[i]>0&&dep[to[i]]==-1){
dep[to[i]]=dep[now]+1;q.push(to[i]);cur[to[i]]=head[to[i]];if(to[i]==T)return 1;
}
}
}
return 0;
}
int find(int now,int limit){
cerr<<now<<" "<<limit<<endl;
if(now==T)return limit;
int flow=0;
for(int i=cur[now];~i&&flow<limit;i=nxt[i]){
cur[now]=i;if(cap[i]==0||dep[to[i]]!=dep[now]+1)continue;
int tmp=find(to[i],min(cap[i],limit-flow));
cerr<<tmp<<endl;
if(tmp==0)dep[to[i]]=-1;
flow+=tmp;cap[i]-=tmp;cap[i^1]+=tmp;
}
return flow;
}
int dinic(){
int maxflow=0;
while(bfs()){cerr<<"success\n";maxflow+=find(S,inf);cerr<<maxflow<<endl;}
return maxflow;
}
bool rs[510],rt[510];
void dfs(int now,bool* r,int k){
r[now]=1;
for(int i = head[now]; ~i; i=nxt[i]){
if(cap[i^k]>0&&!r[to[i]]){
r[to[i]]=1;
dfs(to[i],r,k);
}
}
}
signed main() {
ios::sync_with_stdio(0);
cin.tie(NULL);
cout.tie(NULL);
//freopen();
//freopen();
//time_t start = clock();
//think twice,code once.
//think once,debug forever.
cin>>n>>m; S=0;T=n-1;memset(head,-1,sizeof(head));
f(i,1,m){int u,v,w;cin>>u>>v>>w;add(u,v,w);}
//cout<<
dinic();//<<endl;
dfs(S,rs,0);dfs(T,rt,1); int ans=0;
f(i,0,n-1)cerr<<rs[i]<<" "<<rt[i]<<endl;
for(int i = 0; i <= cnt; i += 2) {
if(cap[i]==0&&rs[from[i]]&&rt[to[i]])ans++;
}
cout<<ans<<endl;
//time_t finish = clock();
//cout << "time used:" << (finish-start) * 1.0 / CLOCKS_PER_SEC <<"s"<< endl;
return 0;
}
1.8 拆点
网络流的两个限制:容量限制和流量守恒,前一个是针对边的,可以很灵活地变化;而后一个是针对点的,但变化不灵活。我们如果想要针对点做限制(譬如,经过某个点的流量有限制)该怎么办呢?
这就引出了拆点。考虑对点 \(i\) 分成入点和出点,其他点连入 \(i\) 的点都连向 \(i_入\);\(i\) 连出的点都连向 \(i_出\)。从 \(i_入\) 连向 \(i_出\) 一条边,就可以实现对点做限制。
1.9 三分图最大匹配问题
农场里 \(n\) 种食物,\(m\) 种饮品,\(k\) 头奶牛,每头奶牛有爱吃的食物和爱喝的饮料,分别只有一种。每种食物和饮品只有一份。每头奶牛吃一份食物。求分配方式,使得有吃有喝的奶牛最多。
可以直接对中间的节点拆点,使得其包含点的限制。
2 最小割模型
重复一下定义:
割:将图分成 \(A, B\) 两个点集,保证 \(S \in A, T \in B\)。
割容量:\(\sum \limits_{i \in A, j \in B} c_{i \rightarrow j}\)。(注意没有第二项)
考虑怎么求最小割的边集(形象理解最小割)。对于跑完最大流的原图,有一些关键边,其中的一些会作为最小割的边集。我们从 \(S\) 出发,经过原图上的剩余容量不为 \(0\) 的边,可以到达的点集作为集合 \(A\),其他点作为集合 \(B\)。
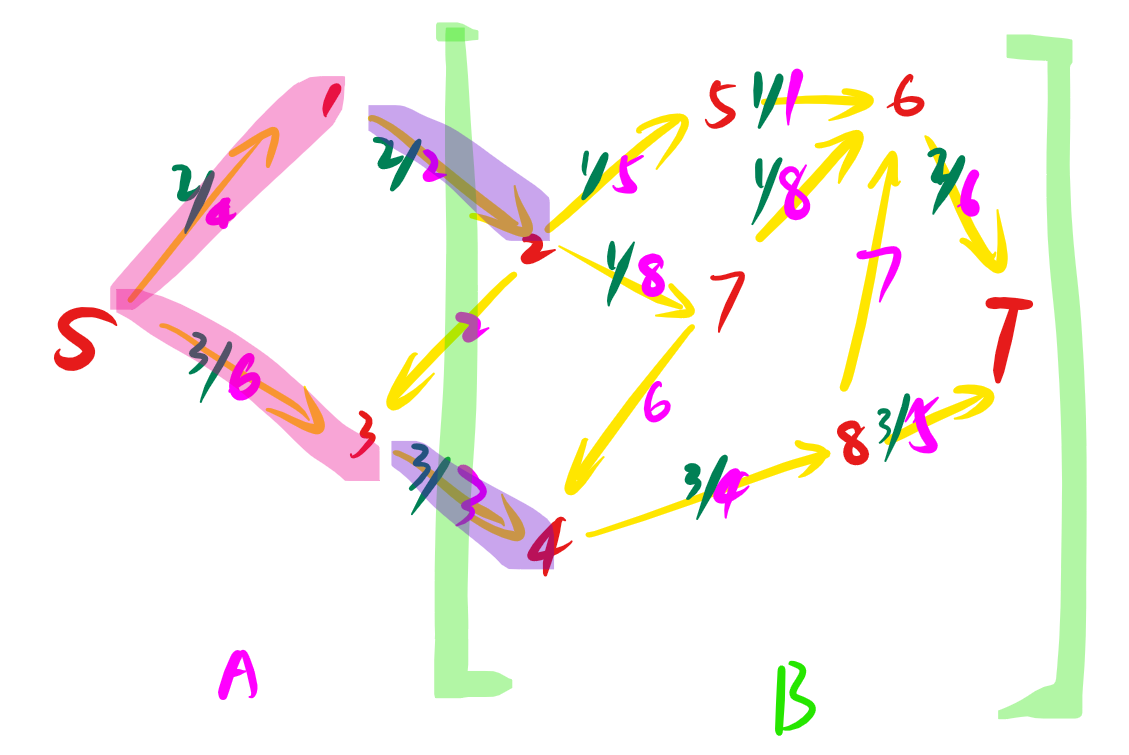
另外,对于任意一组流,其不一定满流,所以生成的割并不一定等于流量。
网络战争
【题意】
给定一个无向图 \((V, E)\),给定两个点 \(S, T\),边有边权,求一个边集 \(e \in E\),使得 \(\cfrac{\sum w}{|e|}\) 最小,并且断开这些边能够使得 \(S, T\) 不连通。
【分析】
看到这个平均数式子,用 01 分数规划的固定套路是二分答案 \(mid\),然后转化为 \(\sum w - mid \ge 0\)。于是我们考虑将所有边权减去 \(mid\)。
然后注意一下这个割集怎么求。
首先,最小割并不等于题目所求的最小的割集,因为可能存在边权为负数的 \(A, B\) 内部边,选上比不选好,所以最小割的集合不一定包含题目的最小割集。
自然地想到边权是负数的边一定要选,把它们删掉即可。考虑正数的边,那么这时候最小割就等于最小割集了。
还有一个问题:无向图,怎么办。其实这也是一个套路,对于每条边,建立两条反向的有向边,考虑这个的正确性:由于最大流最小割定理,我们希望求出的是原图的最小割(无向图意义下),也就是有一些边作为关键边。考虑某一条割边,肯定按照两端分别属于哪个集合给它定一个方向。其他边任意定向。考虑这时候图变成有向图。我们需要把这个有向图能够求出来。也就是,对于某个流 \(f\),某条边只有一个流向,并且这个流向和选择的有向图方向一致。
也即考虑是否能够办到:
- 对于原问题的每一个解,存在一个流,使得每条边只有一个流向,而且与解的流向对应。
- 对于每一个流,其得到的流量不会超过所有原解集的流量。
第一个显然可以办到,我们考虑第二个:如果两条边都有流量,我们可以对两条边的流量进行相互抵消,使得其流量不变,并且可以对应到第一种情况。
于是我们对每条边建两个方向的边,容量都是 \(c\),是对的。
2.1 集合划分模型
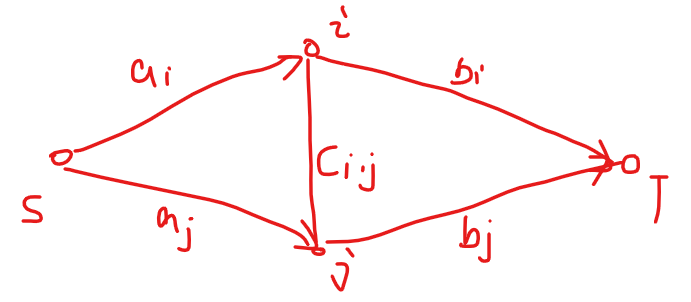
一堆元素,第 \(i\) 个划分到 A 组会有 \(a_i\) 的贡献,划分到 B 组会有 \(b_i\) 的贡献;\(i, j\) 之间有一些有限制:如果分到不同组会有 \(c_{i,j}\) 的贡献,求最小贡献。
这是最小割最重要的一个模型,一些常见的模型都是由此推得。
建图方式:建立 S, T,从 \(i\) 向 S 连一个 \(a_i\) 边,向 T 连一个 \(b_i\) 边,\(i, j\) 连一个双向的 \(c_{i,j}\) 边,求它的最小割即可。注意最大流生成的最小割一条路径有且只会有一条边被割,如果割 \(i\) S 边那么说明 \(i\) 分到 A 组;否则分到 B 组。考虑两种情况:
- 两个都割了同一条边,那么中间不需要割;
- 否则需要割,算上 \(c_{i,j}\) 贡献。
3 关于二分图的一些性质
最大流等于最小割,最小点割集等于最小边割集。
第一个推论就是 hall 定理。
hall 定理:对于一个二分图,存在一个匹配使得其左部点每个点都能匹配到某个点,当且仅当对于任意左部点集合,其邻域的大小 \(\ge\) 其集合大小。原因是,对于任意一个集合,其连通度为集合大小,所以最大流等于左部点个数。
其直接推论:每一个点度数都一样(左右点一起算)的二分图,一定存在完美匹配(最大匹配是 \(\min(l, r)\))。
然后最小边割集等于最大流(最大匹配),最小点割集也等于最大流,于是最小点覆盖(选一些点,使得每一条边至少一个端点在选的点上)等于最大流(删掉这些点,没有边能够到达);最大独立集是最小点覆盖的对偶问题,它等于点数减去最小点覆盖。
考虑 dag 的最小路径覆盖(使用最少的路径,覆盖每个点至少一次):建立一个新图,每个点拆成出入点,按照原图连边,在路径上,前连到后。没得连的,就是路径尾部,于是算出了路径条数=点数-新图最大匹配。
链,指一个点径 \(v_1, ..., v_k\),使得 \(\forall i, \exist v_i \rightsquigarrow v_{i+1}\)。
对于一个偏序,链等于路径,所以最小链覆盖等于最小路径覆盖。最长反链指的是 \(v_1, ..., v_k\),使得 \(\forall i, j, \not \exist v_i \rightsquigarrow v_j\)(两两没有边),其等于最小链覆盖(Dilworth 定理)。
这个性质有什么作用呢?比如我们有一个 DAG,定义一个偏序关系为 \(x \preceq y\),表示 \(x\) 能到达 \(y\)。那么如果需要求一组最大的点集使得它们互相都不能到达,那么这就是一条最长反链,等于最小链覆盖。
3.1反悔贪心
遇到一个问题:有 \(n\) 个位置,一个位置上可能有 \((, )\) 或者两者可以选一个的 \(?\)。求最大括号匹配。
这个问题可以反悔贪心,维护两个集合,分别维护可以匹配的左端点,以及目前做了 \()\) 的通配符,对于一个 \((\),直接加入第一个集合;对于一个 \()\),考虑第一个集合是否非空,如果是就匹配,否则考虑第二个集合是否有元素,如果有,令其成为 \((\),并且当前这个括号和原来这个通配符所匹配的元素匹配。对于一个 \(?\),首先判断是否可以成为 \()\),如果可以的话要注意加入第二个集合;否则加入第一个集合。
这个反悔贪心为什么正确?有没有等价的贪法?有没有对应到网络流的做法?

 浙公网安备 33010602011771号
浙公网安备 33010602011771号