【智能车】摄像头算法理论(2)——OTSU大津法与谷底最小值
1、OTSU简述
在进行图像的二值化时需要选取一个阈值T(Threshold),通常情况下现场调节选取与大津法选取,显然人工选取并不牢靠,一般选用大津法分析现场图像,根据环境自适应选取出最为合适阈值,在发车前使用一次大津法,此后均按照此阈值进行二值化
大津法的基本原理时将图像分为前景和背景两部分,分割的依据是其灰度值的大小,分割点即是阈值;此方法遍历不同阈值,计算该阈值下前景与背景的类间方差,类间方差时衡量前景与背景整体图像灰度的均匀程度,当这一方差取极大值时,说明此二者差别越大,区分越明显,也就达到了需要的阈值
2、具体方法
记:在M×N的图像中,前景像素点占比ω0,像素点数目为N0,平均灰度μ0;背景像素点数占整幅图像的比例为ω1,像素点数目N1,平均灰度为μ1,图像的总平均灰度记为μ,类间方差记为g,阈值为T,则有:
ω0=N0/ M×N (1)
ω1=N1/ M×N (2)
N0+N1=M×N (3)
由T分割M×N中的N0与N1,这就构建出了T与ω0/1的联系
ω0+ω1=1(4)
μ=ω0μ0+ω1μ1 (5)
g=ω0(μ0-μ)^2+ω1(μ1-μ)2 (6)
将(5)带入(6)中可得:
g=ω0ω1(μ0-μ1)2
当g取最大值时对应的T值即为所求,T需要的遍历的范围可取在最小灰度与最大灰度之间
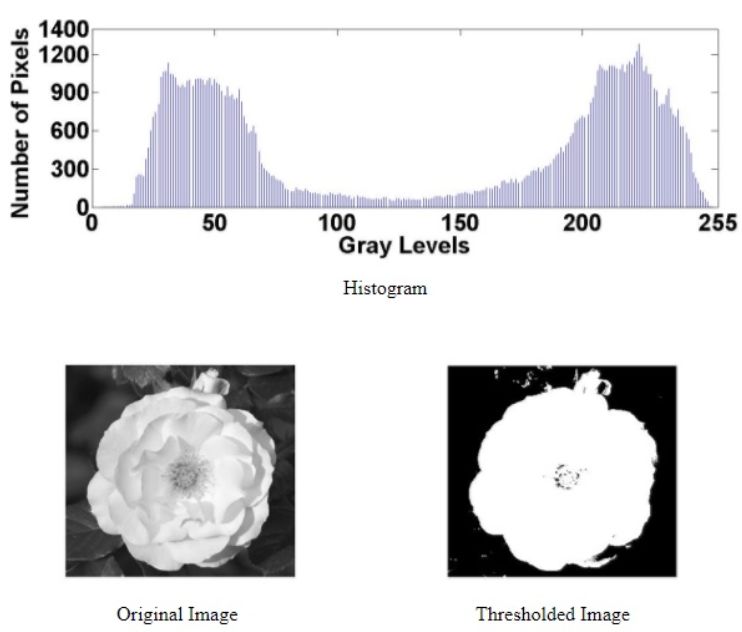
对于这一方法的理解,一般而言大津法适用于噪声较小(可将图像事先经过降噪处理)的,灰度直方图符合双峰分布(双峰分别为背景和前景,中间的低谷对应横轴值即为阈值T)
3、OTSU问题所在
在利用OTSU进行对赛道的阈值分割,尤其时对赛道边缘存在黑色边条时,OTSU往往会出现误判:
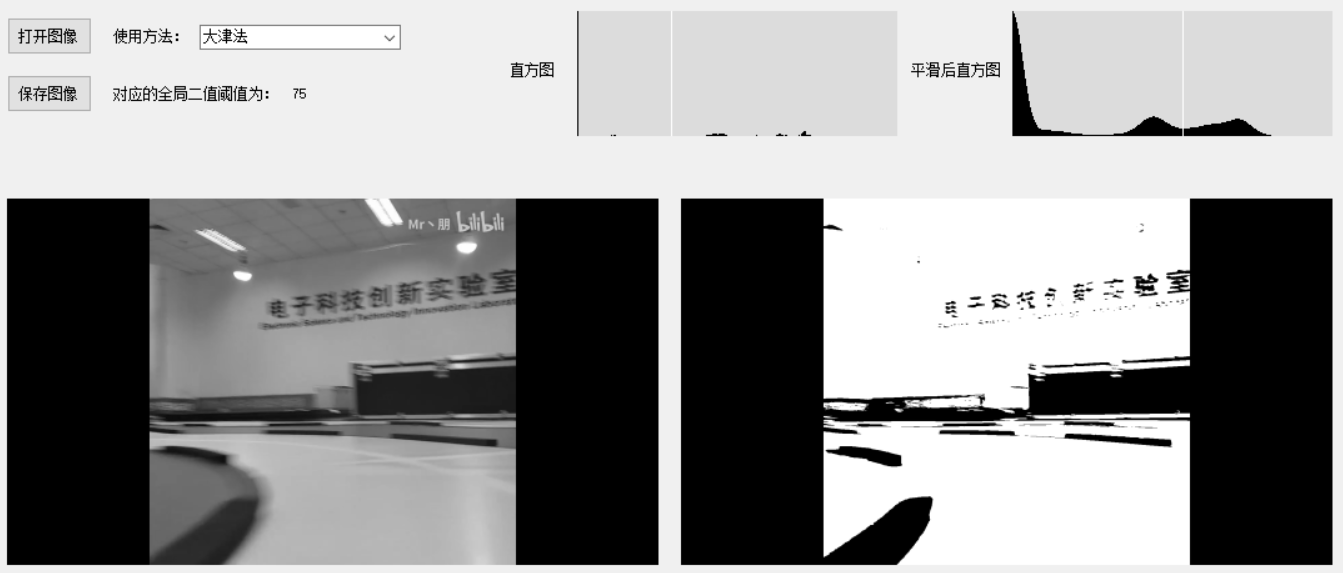
大津法

谷底最小值
而采用谷底最小值算法进行分割效果较好
4、谷底最小值
