


【WCH蓝牙系列芯片】-基于CH32V208开发板—SPI主机硬件NSS模式片选功能
------------------------------------------------------------------------------------------------------------------------------------
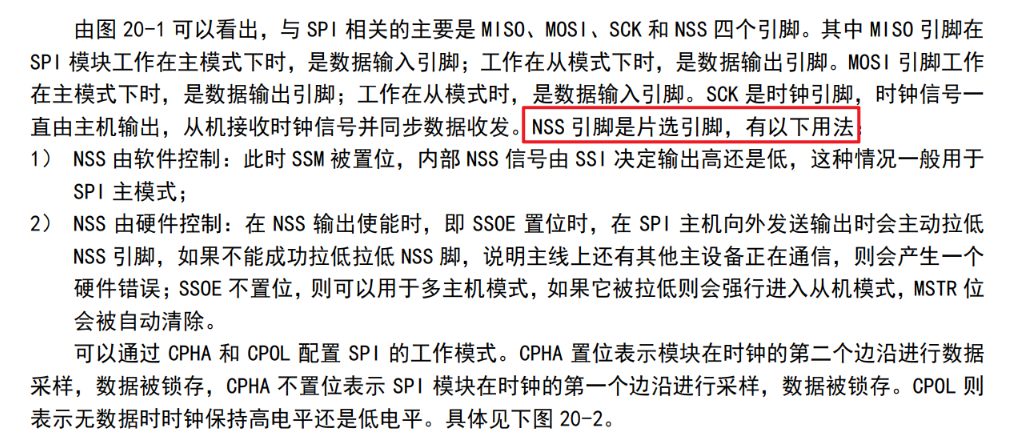
在这篇文章中,对于SPI的主机模式时使用硬件NSS模式中, 配置SPI中需要将片选引脚配置为复用推挽模式,并调用SPI_SSOutputCmd函数,开启对应SPI的硬件片选输出功能。
在当SPI主机模式情况下使用硬件NSS模式时,当置MSTR位和SPE位,需要保证NSS此时已经是高,这样就是要在初始化的时候且启用SPI之前,

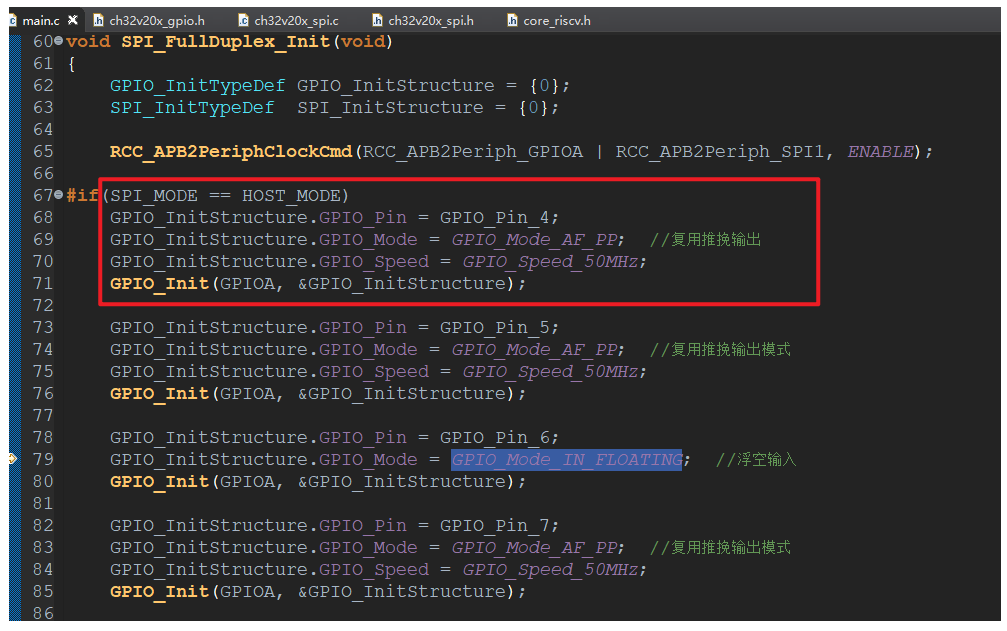
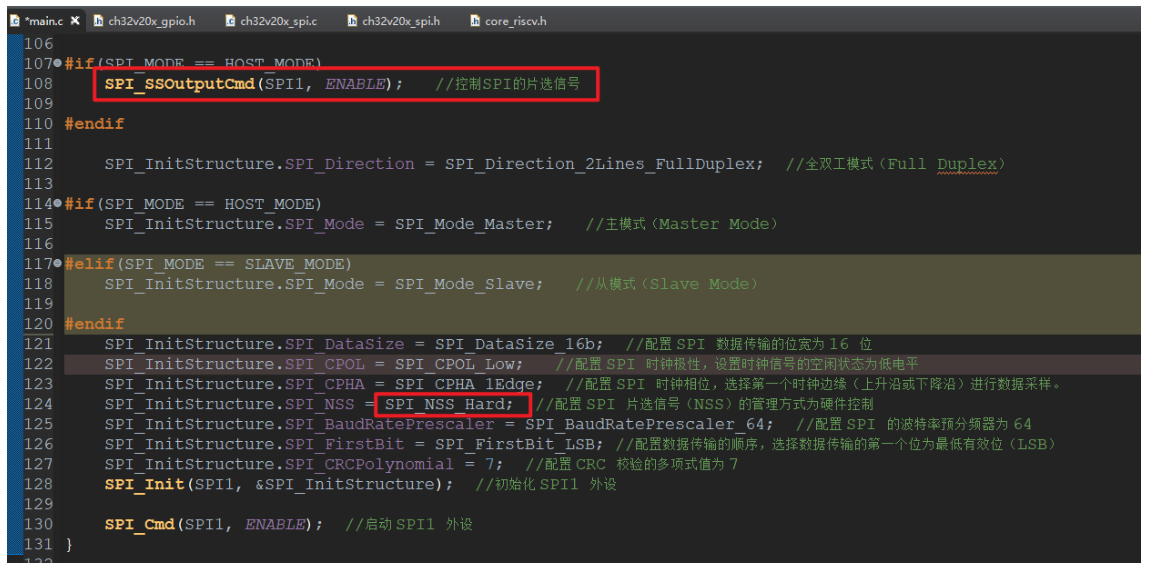
在SPI主机的的初始化时,需要配置PA4脚为复用推挽输出模式,PA4脚是SPI1_NSS功能。然后再通过SPI_SSOutputCmd(SPI1, ENABLE)函数控制SPI的片选信号。还有将SPI_InitStructure.SPI_NSS = SPI_NSS_Hard;设置为硬件控制模式。
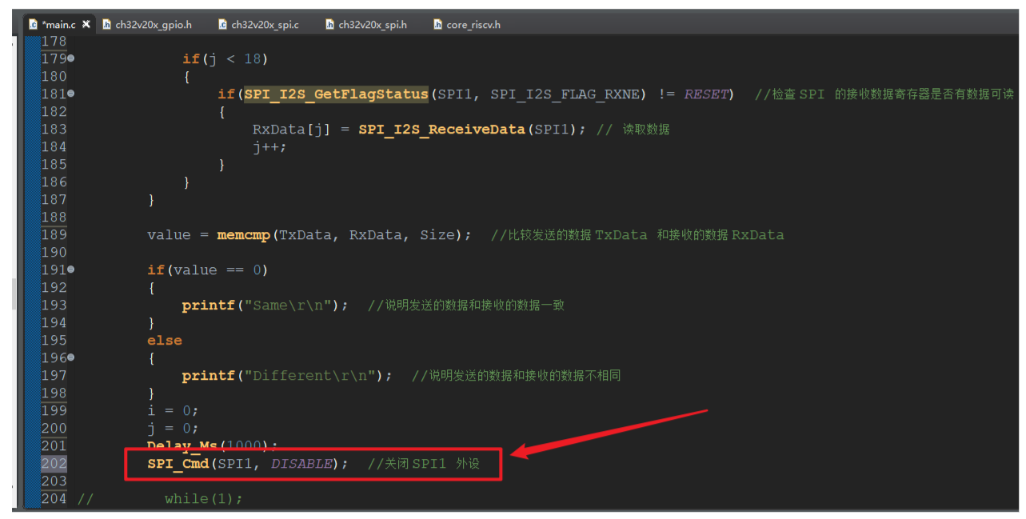
在发送完数据之后,通过 SPI_Cmd(SPI1, DISABLE);,再将NSS信号拉高,以便下一次发送数据。

SPI主机模式测试程序:
#include "debug.h" #include "string.h" /* SPI Mode Definition */ #define HOST_MODE 0 #define SLAVE_MODE 1 /* SPI Communication Mode Selection */ #define SPI_MODE HOST_MODE //#define SPI_MODE SLAVE_MODE /* Global define */ #define Size 18 /* Global Variable */ u16 TxData[Size] = {0x0101, 0x0202, 0x0303, 0x0404, 0x0505, 0x0606, 0x1111, 0x1212, 0x1313, 0x1414, 0x1515, 0x1616, 0x2121, 0x2222, 0x2323, 0x2424, 0x2525, 0x2626}; u16 RxData[Size]; /********************************************************************* * @fn SPI_FullDuplex_Init * * @brief Configuring the SPI for full-duplex communication. * * @return none */ void SPI_FullDuplex_Init(void) { GPIO_InitTypeDef GPIO_InitStructure = {0}; SPI_InitTypeDef SPI_InitStructure = {0}; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_SPI1, ENABLE); #if(SPI_MODE == HOST_MODE) GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入 GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); #elif(SPI_MODE == SLAVE_MODE) //SPI 从模式 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //下拉输入模式 GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式 GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用功能 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入模式 GPIO_Init(GPIOA, &GPIO_InitStructure); #endif #if(SPI_MODE == HOST_MODE) SPI_SSOutputCmd(SPI1, ENABLE); //控制SPI的片选信号 #endif SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //全双工模式(Full Duplex) #if(SPI_MODE == HOST_MODE) SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主模式(Master Mode) #elif(SPI_MODE == SLAVE_MODE) SPI_InitStructure.SPI_Mode = SPI_Mode_Slave; //从模式(Slave Mode) #endif SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b; //配置 SPI 数据传输的位宽为 16 位 SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //配置 SPI 时钟极性,设置时钟信号的空闲状态为低电平 SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //配置 SPI 时钟相位,选择第一个时钟边缘(上升沿或下降沿)进行数据采样。 SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; //配置 SPI 片选信号(NSS)的管理方式为硬件控制 SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64; //配置 SPI 的波特率预分频器为 64 SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_LSB; //配置数据传输的顺序,选择数据传输的第一个位为最低有效位(LSB) SPI_InitStructure.SPI_CRCPolynomial = 7; //配置 CRC 校验的多项式值为 7 SPI_Init(SPI1, &SPI_InitStructure); //初始化 SPI1 外设 SPI_Cmd(SPI1, ENABLE); //启动 SPI1 外设 } /********************************************************************* * @fn main * * @brief Main program. * * @return none */ int main(void) { u8 i = 0; u8 j = 0; u8 value; SystemCoreClockUpdate(); Delay_Init(); USART_Printf_Init(460800); printf("SystemClk:%d\r\n", SystemCoreClock); printf( "ChipID:%08x\r\n", DBGMCU_GetCHIPID() ); #if(SPI_MODE == SLAVE_MODE) printf("Slave Mode\r\n"); Delay_Ms(1000); #endif SPI_FullDuplex_Init(); //初始化SPI #if(SPI_MODE == HOST_MODE) printf("Host Mode\r\n"); Delay_Ms(2000); #endif while(1) { while((i < 18) || (j < 18)) // SPI 数据的发送和接收 { if(i < 18) { if(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) != RESET) //检查 SPI 的发送数据寄存器是否空闲 { SPI_I2S_SendData(SPI1, TxData[i]); //发送数据 i++; } } if(j < 18) { if(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) != RESET) //检查 SPI 的接收数据寄存器是否有数据可读 { RxData[j] = SPI_I2S_ReceiveData(SPI1); // 读取数据 j++; } } } value = memcmp(TxData, RxData, Size); //比较发送的数据 TxData 和接收的数据 RxData if(value == 0) { printf("Same\r\n"); //说明发送的数据和接收的数据一致 } else { printf("Different\r\n"); //说明发送的数据和接收的数据不相同 } i = 0; j = 0; // Delay_Ms(1000); SPI_Cmd(SPI1, DISABLE); //关闭 SPI1 外设 // while(1); } }
