计算机缓存Cache以及Cache Line详解
1. 计算机存储体系简介
存储器是分层次的,离CPU越近的存储器,速度越快,每字节的成本越高,同时容量也因此越小。寄存器速度最快,离CPU最近,成本最高,所以个数容量有限,其次是高速缓存(缓存也是分级,有L1,L2等缓存),再次是主存(普通内存),再次是本地磁盘。
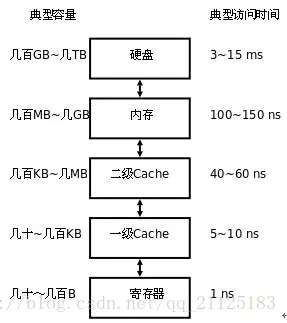
寄存器的速度最快,可以在一个时钟周期内访问,其次是高速缓存,可以在几个时钟周期内访问,普通内存可以在几十个或几百个时钟周期内访问。
存储器分级,利用的是局部性原理。我们可以以经典的阅读书籍为例。我在读的书,捧在手里(寄存器),我最近频繁阅读的书,放在书桌上(缓存),随时取来读。当然书桌上只能放有限几本书。我更多的书在书架上(内存)。如果书架上没有的书,就去图书馆(磁盘)。我要读的书如果手里没有,那么去书桌上找,如果书桌上没有,去书架上找,如果书架上没有去图书馆去找。可以对应寄存器没有,则从缓存中取,缓存中没有,则从内存中取到缓存,如果内存中没有,则先从磁盘读入内存,再读入缓存,再读入寄存器。
2. 计算机缓存 Cache
2.1 Cache 概述
cache,中译名高速缓冲存储器,其作用是为了更好的利用局部性原理,减少CPU访问主存的次数。简单地说,CPU正在访问的指令和数据,其可能会被以后多次访问到,或者是该指令和数据附近的内存区域,也可能会被多次访问。因此,第一次访问这一块区域时,将其复制到cache中,以后访问该区域的指令或者数据时,就不用再从主存中取出。
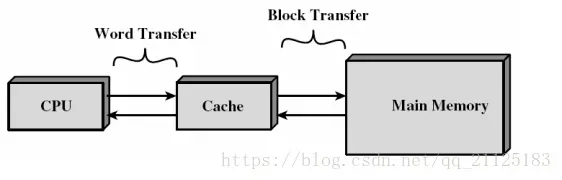
cache分成多个组,每个组分成多个行,linesize是cache的基本单位,从主存向cache迁移数据都是按照linesize为单位替换的。比如linesize为32Byte,那么迁移必须一次迁移32Byte到cache。 这个linesize比较容易理解,想想我们前面书的例子,我们从书架往书桌搬书必须以书为单位,肯定不能把书撕了以页为单位。书就是linesize。当然了现实生活中每本书页数不同,但是同个cache的linesize总是相同的。
所谓8路组相连( 8-way set associative)的含义是指,每个组里面有8个行。
我们知道,cache的容量要远远小于主存,主存和cache肯定不是一一对应的,那么主存中的地址和cache的映射关系是怎样的呢?
拿到一个地址,首先是映射到一个组里面去。如何映射?取内存地址的中间几位来映射。
举例来说,data cache: 32-KB, 8-way set associative, 64-byte line size
Cache总大小为32KB,8路组相连(每组有8个line),每个line的大小linesize为64Byte(cache lines的大小一般为64bytes),我们可以很轻易的算出一共有32K/8/64=64 个组。
对于32位的内存地址,每个line有2^6 = 64Byte,所以地址的【0,5】区分line中的那个字节。一共有64个组。我们取内存地址中间6位来hash查找地址属于那个组。即内存地址的【6,11】位来确定属于64组的哪一个组。组确定了之后,【12,31】的内存地址与组中8个line挨个比对,如果【12,31】为与某个line一致,并且这个line为有效,那么缓存命中。
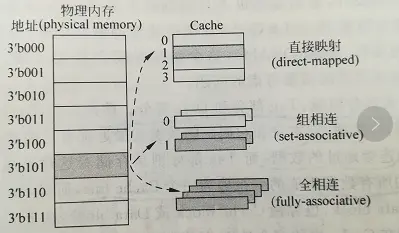
我们可以将cache分成三类:
- 直接映射高速缓存,这个简单,即每个组只有一个line,选中组之后不需要和组中的每个line比对,因为只有一个line。
- 组相联高速缓存,这个就是我们前面介绍的cache。 S个组,每个组E个line。
- 全相联高速缓存,这个简单,只有一个组,就是全相联。不用hash来确定组,直接挨个比对高位地址,来确定是否命中。可以想见这种方式不适合大的缓存。想想看,如果4M 的大缓存 linesize为32Byte,采用全相联的话,就意味着410241024/32 = 128K 个line挨个比较,来确定是否命中,这是多要命的事情。高速缓存立马成了低速缓存了。
描述一个cache需要以下参数:
- cache分级,L1 cache, L2 cache, L3 cache,级别越低,离CPU越近
- cache的容量
- cache的linesize
- cache 每组的行个数.
2.2 Cache 结构
假设内存容量为M,内存地址为m位:那么寻址范围为000…00~FFF…F(m位)倘若把内存地址分为以下三个区间
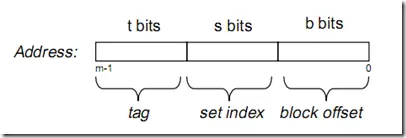
tag, set index, block offset三个区间有什么用呢?再来看看Cache的逻辑结构吧:
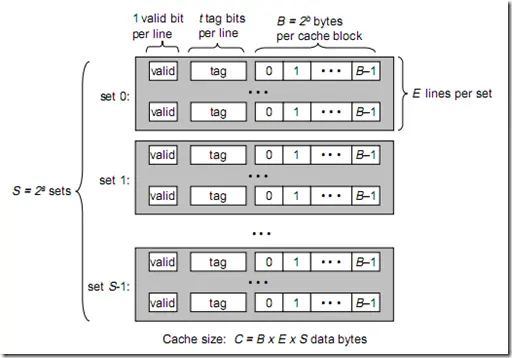
将此图与上图做对比,可以得出各参数如下:
B = 2^b
S = 2^s
现在来解释一下各个参数的意义:
一个cache被分为S个组,每个组有E个cacheline,而一个cacheline中,有B个存储单元,现代处理器中,这个存储单元一般是以字节(通常8个位)为单位的,也是最小的寻址单元。因此,在一个内存地址中,中间的s位决定了该单元被映射到哪一组,而最低的b位决定了该单元在cacheline中的偏移量。valid通常是一位,代表该cacheline是否是有效的(当该cacheline不存在内存映射时,当然是无效的)。tag就是内存地址的高t位,因为可能会有多个内存地址映射到同一个cacheline中,所以该位是用来校验该cacheline是否是CPU要访问的内存单元。
当tag和valid校验成功是,我们称为cache命中,这时只要将cache中的单元取出,放入CPU寄存器中即可。
当tag或valid校验失败的时候,就说明要访问的内存单元(也可能是连续的一些单元,如int占4个字节,double占8个字节)并不在cache中,这时就需要去内存中取了,这就是cache不命中的情况(cache miss)。当不命中的情况发生时,系统就会从内存中取得该单元,将其装入cache中,与此同时也放入CPU寄存器中,等待下一步处理。注意,以下这一点对理解linux cache机制非常重要:
3. 计算机缓存行 ChaceLine
高速缓存其实就是一组称之为缓存行(cache line)的固定大小的数据块,现代计算机缓存行大小基本都是64byte。
当从内存中取单元到cache中时,会一次取一个cacheline大小的内存区域到cache中,然后存进相应的cacheline中。
例如:我们要取地址 (t, s, b) 内存单元,发生了cache miss,那么系统会取 (t, s, 00…000) 到 (t, s, FF…FFF)的内存单元,将其放入相应的cacheline中。
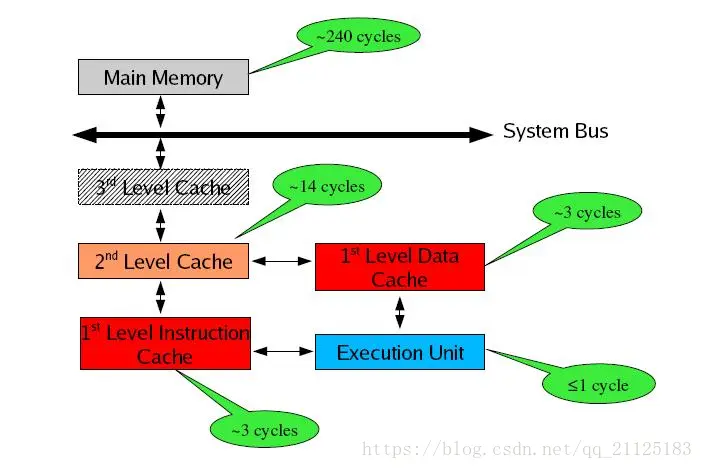
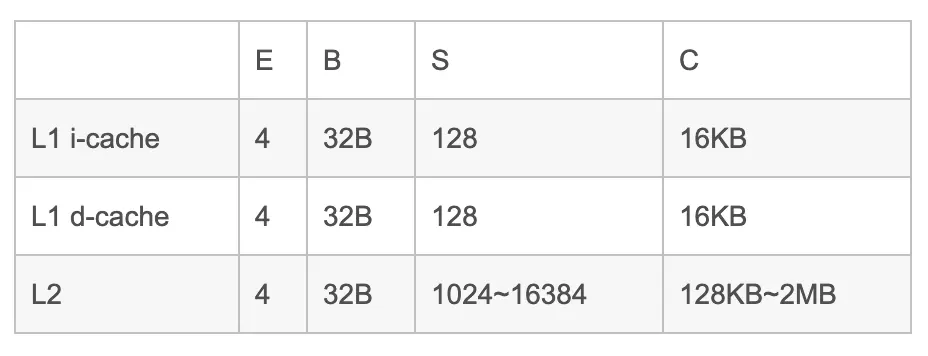
现代处理器,一般将cache分为2~3级,L1, L2, L3。L1一般为CPU专有,不在多个CPU中共享。L2 cache一般是多个CPU共享的,也可能装在主板上。L1 cache还可能分为instruction cache, data cache. 这样CPU能同时取指令和数据。
下面来看看现实中cache的参数,以Intel Pentium处理器为例:
4. 伪共享(False sharing)
假设有变量v1,v2,他们属于同一个cache line中,他们被线程1和线程2所使用的,一个cache line可以被多个不同的线程所使用。如果有其他线程修改了v2的值,线程1和线程2将会强制重新加载cache line。你可能会疑惑我们只是修改了v2的值不应该会影响其他变量,为啥线程1和线程2需要重新加载cache line呢。然后,即使对于多个线程来说这些更新操作是逻辑独立的,但是缓存一致性的保持是以cache line为基础的,而不是以单个独立的元素。这种明显没有必要的共享数据的方式被称作“False sharing”.
5. 缓存行对齐(Padding)
为了获取一个cache line,cpu核心需要执行几百个指令。如果cpu核心需要等待一个cache line重新加载,核心将会停止做其他事情,这种现象被称为"Stall"。Stalls可以通过减少“False Sharing”,一个减少"false sharing"的技巧是填充数据结构,使得线程操作的变量落入到不同的cache line中。
jdk8之前做法
public final static class VolatileLong {
public volatile long q1, q2, q3, q4, q5, q6, q7;
public volatile long value = 0L;
public volatile long p1, p2, p3, p4, p5, p6, p7;
}
jdk8之后采用@Contended注解

 浙公网安备 33010602011771号
浙公网安备 33010602011771号