九点标定法
 坐标系转化(相机的像素点和机器人的世界坐标系)
坐标系转化(相机的像素点和机器人的世界坐标系)
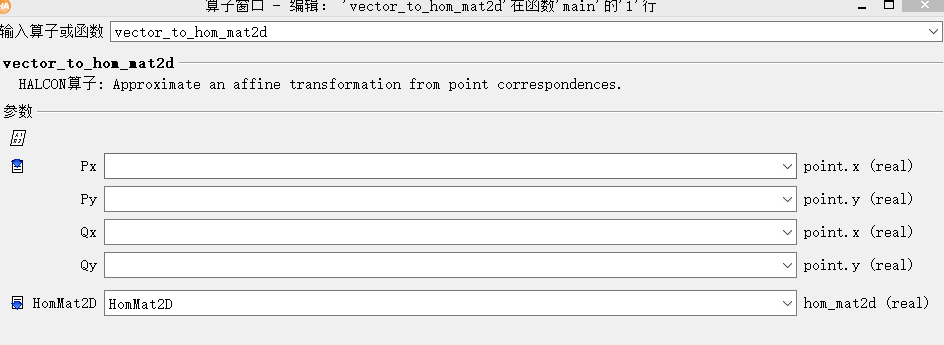
(PX,PY)是像素点坐标的集合 (QX,QY)是机器人坐标的集合
1:固定相机,机器人移动
第一种:固定九点图画 ===》获取九点图画的像素坐标===》移动机器人到每个点的上方,并记录机器人的点坐标===》坐标系转化
第二种:在机器人上方固定一个标识物==》移动机器人到相机下方的一个固定点==》获取相机的当前标识物的像素坐标==》从而获取一组机器人坐标系的一个坐标点对应的像素点==》依次移动九个位置,分别获取九点坐标==》坐标系转化
2:机器人带着相机移动(相机移动,机器人移动)
在平台上固定一个标识物==》移动机器人到标识物的一个固定点==》获取相机的当前标识物的像素坐标==》从而获取一组机器人坐标系的一个坐标点对应的像素点==》依次移动九个位置,分别获取九点坐标==》坐标系转化

 浙公网安备 33010602011771号
浙公网安备 33010602011771号