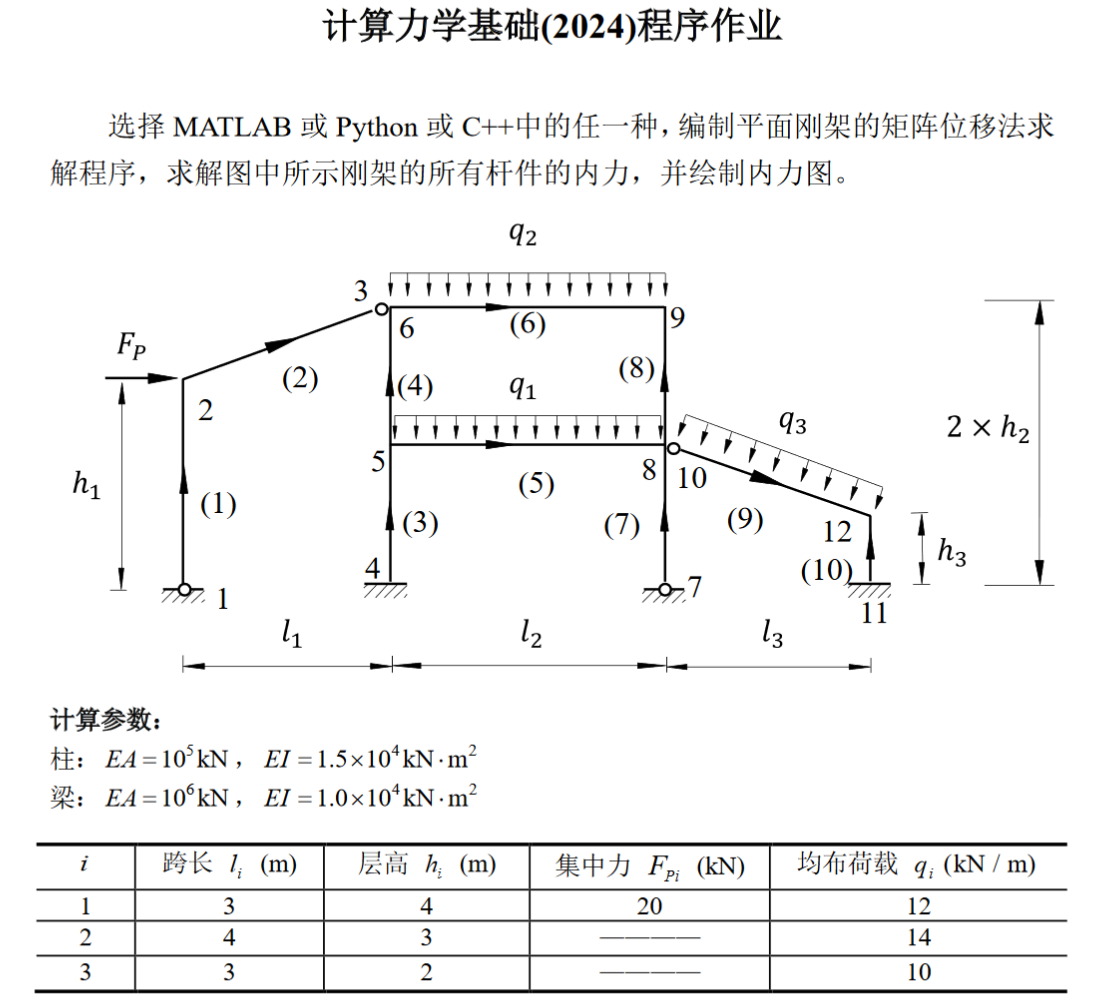
矩阵位移法大作业监工日记
5/15
新建文件夹,先做好前期结构数据化的手写性梳理,写一点变量的定义,感觉有很多重复的信息,但是懒得精简了。
编写输入文件in.txt,和直接用const差不多,感觉不如直接程序内打表,因为后面结构数据化的时候还是直接存的信息,泛用化水平进一步降低。


1 /* 矩阵位移法大作业 2 单元数:10 结点数:12 整体结点位移编码:22 3 结点编码: 4 1(0,0,1) 5 2(2,3,4) 6 3(5,6,7,) 7 4(0,0,0) 8 5(8,9,10) 9 6(5,6,11) 10 7(0,0,12) 11 8(13,14,15) 12 9(16,17,18) 13 10(13,14,19) 14 11(0,0,0) 15 12(20,21,22) 16 单元定位向量: 柱:0 梁:1 17 (1) 【0,0,1,2,3,4】 1,2 0 18 (2)【2,3,4,5,6,7】 2,3 1 19 (3)【0,0,0,8,9,10】 4,5 0 20 (4)【8,9,10,5,6,11】 5,6 0 21 (5)【8,9,10,13,14,15】 5,8 1 22 (6)【5,6,11,16,17,18】 6,9 1 23 (7)【0,0,12,13,14,15】 7,8 0 24 (8)【 13,14,15,16,17,18】 8,9 0 25 (9)【13,14,19,20,21,22】 10,12 1 26 (10)【0,0,0,20,21,22】 11,12 0 27 */ 28 /* 输入文件 in.txt 29 12 10 22 30 100000 15000 31 1000000 10000 32 3 4 3 33 4 3 2 34 20 35 12 14 10 36 0 0 1 37 2 3 4 38 5 6 7 39 0 0 0 40 8 9 10 41 5 6 11 42 0 0 12 43 13 14 15 44 16 17 18 45 13 14 19 46 0 0 0 47 20 21 22 48 1 2 0 49 2 3 1 50 4 5 0 51 5 6 0 52 5 8 1 53 6 9 1 54 7 8 0 55 8 9 0 56 10 12 1 57 11 12 0 58 */ 59 60 61 62 63 #include<iostream> 64 #include<fstream> 65 #include<cstdio> 66 #include<algorithm> 67 #include<cmath> 68 using namespace std; 69 double EA[3],EI[3]; //梁和柱的强度参数表 70 double l[4],h[4],q[4],Fp; // 跨长、层高、均布荷载、集中力 71 double K[25][25],k[25][25]; // 整体刚度矩阵 和 单元刚度矩阵 72 double alpha,T[8][8]; //旋转角和旋转矩阵 73 int Njoint,Nelem,NglbDOF; //结点数,单元数,结点位移个数 74 struct Joint{ //结点信息 75 double x,y; //坐标 76 int GDOF[5]; //结点位移编码 77 }J[20]; 78 struct Elem{ //单元信息 79 int N1,N2; //两个结点 80 int GlbDOF[8]; //单元定位向量 81 double len,A,EI,EA; //长度,转角,抗弯刚度,抗拉刚度 82 }E[15]; 83 int main(){ 84 cin>>Njoint>>Nelem>>NglbDOF; //读入信息 并 进行结构数据化 85 cin>>EA[0]>>EI[0]>>EA[1]>>EI[1]; 86 for(int i=1;i<=3;++i) cin>>l[i]; 87 for(int i=1;i<=3;++i) cin>>h[i]; cin>>Fp; 88 for(int i=1;i<=3;++i) cin>>q[i]; 89 90 J[1].x=J[2].x=0; //结点初始化 91 J[3].x=J[4].x=J[5].x=J[6].x=l[1]; 92 J[7].x=J[8].x=J[9].x=J[10].x=l[1]+l[2]; 93 J[11].x=J[12].x=l[1]+l[2]+l[3]; 94 J[1].y=J[4].y=J[7].y=J[11].y=0; 95 J[12].y=h[3]; 96 J[5].y=J[8].y=J[10].y=h[2]; 97 J[2].y=h[1]; 98 J[3].y=J[6].y=J[9].y=2.0*h[2]; 99 for(int i=1;i<=Njoint;++i) 100 for(int j=1;j<=3;++j) 101 cin>>J[i].GDOF[j]; 102 103 for(int i=1;i<=Nelem;++i){ //单元初始化 104 cin>>E[i].N1>>E[i].N2; 105 int opt; cin>>opt; 106 E[i].EA=EA[opt]; E[i].EI=EI[opt]; 107 for(int j=1;j<=3;++j){ 108 E[i].GlbDOF[j]=J[E[i].N1].GDOF[j]; 109 E[i].GlbDOF[j+3]=J[E[i].N2].GDOF[j]; 110 } 111 E[i].len=sqrt(pow(J[E[i].N1].x-J[E[i].N2].x,2)+pow(J[E[i].N1].y-J[E[i].N2].y,2)); 112 E[i].A= 113 } 114 115 116 }
5/16
开始写单元刚度矩阵的生成,一个元素一个元素敲,接着生成旋转矩阵,开始进行整体刚度阵的集成。矩阵乘法直接抄的一年级时做的大作业,估计后面解线性方程组的时候还会再copy。
1 /* 矩阵位移法大作业 2 单元数:10 结点数:12 整体结点位移编码:22 3 结点编码: 4 1(0,0,1) 5 2(2,3,4) 6 3(5,6,7,) 7 4(0,0,0) 8 5(8,9,10) 9 6(5,6,11) 10 7(0,0,12) 11 8(13,14,15) 12 9(16,17,18) 13 10(13,14,19) 14 11(0,0,0) 15 12(20,21,22) 16 单元定位向量: 柱:0 梁:1 17 (1) 【0,0,1,2,3,4】 1,2 0 18 (2)【2,3,4,5,6,7】 2,3 1 19 (3)【0,0,0,8,9,10】 4,5 0 20 (4)【8,9,10,5,6,11】 5,6 0 21 (5)【8,9,10,13,14,15】 5,8 1 22 (6)【5,6,11,16,17,18】 6,9 1 23 (7)【0,0,12,13,14,15】 7,8 0 24 (8)【 13,14,15,16,17,18】 8,9 0 25 (9)【13,14,19,20,21,22】 10,12 1 26 (10)【0,0,0,20,21,22】 11,12 0 27 */ 28 /* 输入文件 in.txt 29 12 10 22 30 100000 15000 31 1000000 10000 32 3 4 3 33 4 3 2 34 20 35 12 14 10 36 0 0 1 37 2 3 4 38 5 6 7 39 0 0 0 40 8 9 10 41 5 6 11 42 0 0 12 43 13 14 15 44 16 17 18 45 13 14 19 46 0 0 0 47 20 21 22 48 1 2 0 49 2 3 1 50 4 5 0 51 5 6 0 52 5 8 1 53 6 9 1 54 7 8 0 55 8 9 0 56 10 12 1 57 11 12 0 58 */ 59 60 61 62 63 #include<iostream> 64 #include<fstream> 65 #include<cstdio> 66 #include<algorithm> 67 #include<cmath> 68 #include<string.h> 69 using namespace std; 70 double EA[3],EI[3]; //梁和柱的强度参数表 71 double l[4],h[4],q[4],Fp; // 跨长、层高、均布荷载、集中力 72 // 整体刚度矩阵 和 单元刚度矩阵 73 //旋转角和旋转矩阵 74 int Njoint,Nelem,NglbDOF; //结点数,单元数,结点位移个数 75 struct Joint{ //结点信息 76 double x,y; //坐标 77 int GDOF[5]; //结点位移编码 78 }J[20]; 79 struct Elem{ //单元信息 80 int N1,N2; //两个结点 81 int GlbDOF[8]; //单元定位向量 82 double len,A,EI,EA; //长度,转角,抗弯刚度,抗拉刚度 83 }E[15]; 84 struct Matrix{ //便于矩阵运算的方法 85 int n,m; 86 double a[25][25]; 87 void clear(int _n=0,int _m=0){ 88 n=_n;m=_m; memset(a,0.0,sizeof(a)); 89 } 90 Matrix operator *(const Matrix& b)const {//矩阵乘法 91 Matrix c; 92 c.n=n; 93 c.m=b.m; 94 int n=n, m=b.m, k=m; 95 for (int i=1;i<=n;++i) 96 for (int j=1;j<=m;++j) 97 for (int l=1;l<=k;++l) 98 c.a[i][j]+=a[i][l]*a[l][j]; 99 return c; 100 } 101 }K,_k,k,T,TT;// 整体刚度矩阵 和 单元刚度矩阵 旋转角和旋转矩阵 102 void init(){ //初始化过程 103 cin>>Njoint>>Nelem>>NglbDOF; //读入信息 并 进行结构数据化 104 cin>>EA[0]>>EI[0]>>EA[1]>>EI[1]; 105 for(int i=1;i<=3;++i) cin>>l[i]; 106 for(int i=1;i<=3;++i) cin>>h[i]; cin>>Fp; 107 for(int i=1;i<=3;++i) cin>>q[i]; 108 109 J[1].x=J[2].x=0; //结点初始化 110 J[3].x=J[4].x=J[5].x=J[6].x=l[1]; 111 J[7].x=J[8].x=J[9].x=J[10].x=l[1]+l[2]; 112 J[11].x=J[12].x=l[1]+l[2]+l[3]; 113 J[1].y=J[4].y=J[7].y=J[11].y=0; 114 J[12].y=h[3]; 115 J[5].y=J[8].y=J[10].y=h[2]; 116 J[2].y=h[1]; 117 J[3].y=J[6].y=J[9].y=2.0*h[2]; 118 for(int i=1;i<=Njoint;++i) 119 for(int j=1;j<=3;++j) 120 cin>>J[i].GDOF[j]; 121 122 for(int i=1;i<=Nelem;++i){ //单元初始化 123 cin>>E[i].N1>>E[i].N2; 124 int opt; cin>>opt; 125 E[i].EA=EA[opt]; E[i].EI=EI[opt]; 126 for(int j=1;j<=3;++j){ 127 E[i].GlbDOF[j]=J[E[i].N1].GDOF[j]; 128 E[i].GlbDOF[j+3]=J[E[i].N2].GDOF[j]; 129 } 130 E[i].len=sqrt(pow(J[E[i].N1].x-J[E[i].N2].x,2)+pow(J[E[i].N1].y-J[E[i].N2].y,2)); 131 E[i].A=8.0*atan(1.0)-atan((J[E[i].N2].y-J[E[i].N1].y)/(J[E[i].N2].x-J[E[i].N1].x)); 132 } 133 K.clear(22,22);_k.clear(6,6); k.clear(6,6); 134 T.clear(6,6);TT.clear(6,6); 135 } 136 void Integration(int i){ 137 double _a=E[i].EA/E[i].len; 138 double _b=12.0*E[i].EI/pow(E[i].len,3); 139 double _c=6.0*E[i].EI/pow(E[i].len,2); 140 double _d=4.0*E[i].EI/E[i].len; 141 _k.a[1][1]=_k.a[4][4]=_a; 142 _k.a[1][4]=_k.a[4][1]=-_a; 143 _k.a[2][2]=_k.a[5][5]=_b; 144 _k.a[2][5]=_k.a[5][2]=-_b; 145 _k.a[2][3]=_k.a[3][2]=_k.a[2][6]=_k.a[6][2]=_c; 146 _k.a[3][5]=_k.a[5][3]=_k.a[6][5]=_k.a[5][6]=-_c; 147 _k.a[3][3]=_k.a[6][6]=_d; 148 _k.a[3][6]=_k.a[6][3]=0.5*_d; 149 double _A=E[i].A; 150 T.a[1][1]=T.a[2][2]=T.a[4][4]=T.a[5][5]=cos(_A); 151 T.a[1][2]=T.a[4][5]=sin(_A); 152 T.a[2][1]=T.a[5][4]=-sin(_A); 153 T.a[3][3]=T.a[6][6]=1.0; 154 for(int j=1;j<=6;++j) 155 for(int l=1;l<=6;++l) 156 TT.a[j][l]=T.a[l][j]; 157 k=TT*_k*T; 158 for(int j=1;j<=6;++j) 159 for(int l=1;l<=6;++l){ 160 int I=E[i].GlbDOF[j],J=E[i].GlbDOF[l]; 161 if(I>0 && J>0) 162 K.a[I][j]+=k.a[j][l]; 163 } 164 } 165 void calcP(){ 166 167 } 168 int main(){ 169 init(); //开始数据结构化 170 for(int i=1;i<=Nelem;++i) 171 Integration(i); //集成刚度阵 172 calcP(); //计算整体结点荷载 173 }
6/12
突然基本上写完了,完成了整体结点荷载向量的集成,从而计算出了位移和杆端力,完成了矩阵位移法的基本过程。调试过程主要是和各种除以0的精度问题做斗争,还发现大一时候写的高斯消元是错误的,有一处倒着枚举写成了正着枚举,而大作业自己给的例子过于简陋以至于没有发现这个问题,骗了郑老师的4.0
1 /* 矩阵位移法大作业 2 单元数:10 结点数:12 整体结点位移编码:22 3 结点编码: 4 1(0,0,1) 5 2(2,3,4) 6 3(5,6,7,) 7 4(0,0,0) 8 5(8,9,10) 9 6(5,6,11) 10 7(0,0,12) 11 8(13,14,15) 12 9(16,17,18) 13 10(13,14,19) 14 11(0,0,0) 15 12(20,21,22) 16 单元定位向量: 柱:0 梁:1 17 (1) 【0,0,1,2,3,4】 1,2 0 18 (2)【2,3,4,5,6,7】 2,3 1 19 (3)【0,0,0,8,9,10】 4,5 0 20 (4)【8,9,10,5,6,11】 5,6 0 21 (5)【8,9,10,13,14,15】 5,8 1 22 (6)【5,6,11,16,17,18】 6,9 1 23 (7)【0,0,12,13,14,15】 7,8 0 24 (8)【 13,14,15,16,17,18】 8,9 0 25 (9)【13,14,19,20,21,22】 10,12 1 26 (10)【0,0,0,20,21,22】 11,12 0 27 */ 28 /* 输入文件 in.txt 29 12 10 22 30 100000 15000 31 1000000 10000 32 3 4 3 33 4 3 2 34 20 35 12 14 10 36 0 0 1 37 2 3 4 38 5 6 7 39 0 0 0 40 8 9 10 41 5 6 11 42 0 0 12 43 13 14 15 44 16 17 18 45 13 14 19 46 0 0 0 47 20 21 22 48 1 2 0 49 2 3 1 50 4 5 0 51 5 6 0 52 5 8 1 53 6 9 1 54 7 8 0 55 8 9 0 56 10 12 1 57 11 12 0 58 */ 59 60 61 62 63 #include<iostream> 64 #include<fstream> 65 #include<cstdio> 66 #include<algorithm> 67 #include<cmath> 68 #include<string.h> 69 using namespace std; 70 const double eps=1e-18; 71 double EA[3],EI[3]; //梁和柱的强度参数表 72 double l[4],h[4],q[4],Fp; // 跨长、层高、均布荷载、集中力 73 // 整体刚度矩阵 和 单元刚度矩阵 74 //旋转角和旋转矩阵 75 int Njoint,Nelem,NglbDOF; //结点数,单元数,结点位移个数 76 struct Joint{ //结点信息 77 double x,y; //坐标 78 int GDOF[5]; //结点位移编码 79 }J[20]; 80 struct Elem{ //单元信息 81 int N1,N2; //两个结点 82 int GlbDOF[8]; //单元定位向量 83 double len,A,EI,EA; //长度,转角,抗弯刚度,抗拉刚度 84 }E[15]; 85 struct Matrix{ //便于矩阵运算的方法 86 int n,m; 87 double a[25][25]; 88 Matrix() { //默认构造函数 89 n = 0; m = 0; 90 memset(a, 0, sizeof(a)); 91 } 92 void clear(int _n=0,int _m=0){ 93 n=_n;m=_m; memset(a,0.0,sizeof(a)); 94 } 95 Matrix operator +(const Matrix& b)const {//矩阵加法 96 Matrix c; 97 c.n=b.n; 98 c.m=b.m; 99 int nn=c.n,mm=c.m; 100 for (int i=1;i<=nn;++i) 101 for (int j=1;j<=mm;++j) 102 c.a[i][j]=a[i][j]+b.a[i][j]; 103 return c; 104 } 105 Matrix operator *(const Matrix& b)const {//矩阵乘法 106 Matrix c; 107 c.n=n; 108 c.m=b.m; 109 int nn=n,mm=b.m, kk=m; 110 for (int i=1;i<=nn;++i) 111 for (int j=1;j<=mm;++j) 112 for (int l=1;l<=kk;++l) 113 c.a[i][j]+=a[i][l]*b.a[l][j]; 114 return c; 115 } 116 void Gauss() {//解线性方程组 117 int r=0; 118 // cout<<"n="<<n<<" m="<<m<<endl; 119 for (int i=1,j=1;i<=n&&j<=n;++i,++j){ 120 int id=0; 121 for (int k=i;k<=n;++k) 122 if (abs(a[k][j])>eps){ 123 id = k; break; 124 } 125 if(!id) --i; 126 else{ 127 for(int k=j;k<=m;++k) 128 swap(a[i][k],a[id][k]); 129 // cout<<" look"<<endl; 130 for(int k=m;k>=j;--k) 131 a[i][k]/=a[i][j]/*,cout<<a[i][k]<<" "*/; 132 // cout<<endl; 133 for (int k=i+1;k<=n;++k) 134 if (abs(a[k][j])>eps){ 135 double K_=a[k][j]/a[i][j]; 136 for(int l=j;l<=m;++l){ 137 a[k][l]-= K_*a[i][l]; 138 } 139 } 140 // else a[k][j]=0.0; 141 ++r; 142 } 143 /* cout<<"KKK"<<endl; 144 for(int i=1;i<=n;++i){ 145 for(int j=1;j<=n+1;++j) 146 cout<<a[i][j]<<" "; 147 cout<<endl; 148 }*/ 149 } 150 /* cout<<"KKK"<<endl; 151 for(int i=1;i<=n;++i){ 152 for(int j=1;j<=n+1;++j) 153 cout<<a[i][j]<<" "; 154 cout<<endl; 155 }*/ 156 for(int i=n;i>=1;--i) 157 for(int j=i+1;j<=n;++j) 158 a[i][n+1]-=a[j][n+1]*a[i][j]; 159 } 160 /* void out() const{//输出矩阵 161 cout<<"n="<<n<<" m="<<m<<endl; 162 for (int i = 1; i <= n; i++) { 163 for (int j = 1; j <= m; ++j) 164 cout << a[i][j] << " "; 165 cout << endl; 166 } 167 cout << endl; 168 }*/ 169 }K,_k,k[25],T,TT,P,PFe[25],Cal,Delta,delta[25];// 整体刚度矩阵 单元刚度矩阵 旋转角和旋转矩阵 170 void init(){ //初始化过程 171 cin>>Njoint>>Nelem>>NglbDOF; //读入信息 并 进行结构数据化 172 cin>>EA[0]>>EI[0]>>EA[1]>>EI[1]; 173 for(int i=1;i<=3;++i) cin>>l[i]; 174 for(int i=1;i<=3;++i) cin>>h[i]; cin>>Fp; 175 for(int i=1;i<=3;++i) cin>>q[i]; 176 177 J[1].x=J[2].x=0; //结点初始化 178 J[3].x=J[4].x=J[5].x=J[6].x=l[1]; 179 J[7].x=J[8].x=J[9].x=J[10].x=l[1]+l[2]; 180 J[11].x=J[12].x=l[1]+l[2]+l[3]; 181 J[1].y=J[4].y=J[7].y=J[11].y=0; 182 J[12].y=h[3]; 183 J[5].y=J[8].y=J[10].y=h[2]; 184 J[2].y=h[1]; 185 J[3].y=J[6].y=J[9].y=2.0*h[2]; 186 for(int i=1;i<=Njoint;++i) 187 for(int j=1;j<=3;++j) 188 cin>>J[i].GDOF[j]; 189 190 for(int i=1;i<=Nelem;++i){ //单元初始化 191 cin>>E[i].N1>>E[i].N2; 192 int opt; cin>>opt; 193 E[i].EA=EA[opt]; E[i].EI=EI[opt]; 194 for(int j=1;j<=3;++j){ 195 E[i].GlbDOF[j]=J[E[i].N1].GDOF[j]; 196 E[i].GlbDOF[j+3]=J[E[i].N2].GDOF[j]; 197 } 198 E[i].len=sqrt(pow(J[E[i].N1].x-J[E[i].N2].x,2)+pow(J[E[i].N1].y-J[E[i].N2].y,2)); 199 double dy=J[E[i].N2].y-J[E[i].N1].y,dx=J[E[i].N2].x-J[E[i].N1].x; 200 if(abs(dx)<eps) dx=eps; 201 E[i].A=8.0*atan(1.0)-atan((dy)/(dx)); 202 // cout<<"atan(1)"<<8*atan(1.0)<<endl; 203 // cout<<dy<<" "<<dx<<" "<<atan(dy/dx)<<endl; 204 k[i].clear(6,6); 205 PFe[i].clear(6,1); 206 delta[i].clear(6,1); 207 } 208 K.clear(NglbDOF,NglbDOF);_k.clear(6,6); 209 T.clear(6,6);TT.clear(6,6); 210 P.clear(NglbDOF,1); 211 Cal.clear(NglbDOF,NglbDOF+1); 212 Delta.clear(NglbDOF,1); 213 } 214 void calT(double _A){ 215 T.clear(6,6); TT.clear(6,6); 216 /* for(int i=1;i<=6;++i){ 217 for(int j=1;j<=6;++j){ 218 cout<<TT.a[i][j]<<" "; 219 }cout<<endl; 220 }*/ 221 // cout<<"A="<<_A<<endl; 222 T.a[1][1]=T.a[2][2]=T.a[4][4]=T.a[5][5]=cos(_A); 223 // cout<<"cos="<<cos(_A)<<endl; 224 T.a[1][2]=T.a[4][5]=sin(_A); 225 T.a[2][1]=T.a[5][4]=-sin(_A); 226 T.a[3][3]=T.a[6][6]=1.0; 227 for(int j=1;j<=6;++j) 228 for(int l=1;l<=6;++l) 229 TT.a[j][l]=T.a[l][j]; 230 } 231 void Integration(int i){ 232 // cout<<"i="<<i<<endl; 233 // cout<<"len="<<E[i].len<<endl; 234 _k.clear(6,6); 235 double _a=E[i].EA/E[i].len; 236 double _b=12.0*E[i].EI/pow(E[i].len,3); 237 double _c=6.0*E[i].EI/pow(E[i].len,2); 238 double _d=4.0*E[i].EI/E[i].len; 239 _k.a[1][1]=_k.a[4][4]=_a; 240 _k.a[1][4]=_k.a[4][1]=-_a; 241 _k.a[2][2]=_k.a[5][5]=_b; 242 _k.a[2][5]=_k.a[5][2]=-_b; 243 _k.a[2][3]=_k.a[3][2]=_k.a[2][6]=_k.a[6][2]=_c; 244 _k.a[3][5]=_k.a[5][3]=_k.a[6][5]=_k.a[5][6]=-_c; 245 _k.a[3][3]=_k.a[6][6]=_d; 246 _k.a[3][6]=_k.a[6][3]=0.5*_d; 247 double _A=E[i].A; 248 calT(_A); 249 // cout<<"fin"<<i<<endl; 250 /* for(int i=1;i<=6;++i){ 251 for(int j=1;j<=6;++j){ 252 cout<<TT.a[i][j]<<" "; 253 }cout<<endl; 254 } 255 cout<<endl; 256 for(int i=1;i<=6;++i){ 257 for(int j=1;j<=6;++j){ 258 cout<<T.a[i][j]<<" "; 259 }cout<<endl; 260 }*/ 261 // TT.out();T.out();_k.out(); 262 // _k.out(); 263 // cout<<"chengfa"<<endl; 264 // (TT*_k*T).out(); 265 k[i]=(TT*_k*T); 266 // k[i].out(); 267 for(int j=1;j<=6;++j) 268 for(int l=1;l<=6;++l){ 269 int I=E[i].GlbDOF[j],J=E[i].GlbDOF[l]; 270 if(I>0 && J>0) 271 K.a[I][J]+=k[i].a[j][l]; 272 } 273 } 274 275 276 void calPE(int qi,int Ei){ 277 double l=E[Ei].len,_A=E[Ei].A; 278 // cout<<_A<<endl; 279 calT(_A); 280 // cout<<"calt"<<endl; 281 PFe[Ei].clear(6,1); 282 // cout<<"clear"<<endl; 283 // cout<<"aaaa"<<endl; 284 // cout<<"q="<<q[qi]<<endl; 285 PFe[Ei].a[1][1]=0.0; 286 PFe[Ei].a[2][1]=-q[qi]*l/2.0; 287 PFe[Ei].a[3][1]=-q[qi]*l*l/12.0; 288 PFe[Ei].a[4][1]=0.0; 289 PFe[Ei].a[5][1]=-q[qi]*l/2.0; 290 PFe[Ei].a[6][1]=q[qi]*l*l/12.0; 291 /* for(int i=1;i<=6;++i){ 292 for(int j=1;j<=6;++j){ 293 cout<<TT.a[i][j]<<" "; 294 }cout<<endl; 295 } 296 cout<<"aa"<<TT.n<<" "<<TT.m<<endl; 297 cout<<"aa"<<PFe[Ei].n<<" "<<PFe[Ei].m<<endl; */ 298 // TT.out(); PFe[Ei].out(); 299 // (TT*PFe[Ei]).out(); 300 PFe[Ei]=(TT*PFe[Ei]); 301 // cout<<"PFE"<<endl; 302 // PFe[Ei].out(); 303 for(int i=1;i<=6;++i) 304 P.a[E[Ei].GlbDOF[i]][1]-=PFe[Ei].a[i][1]; 305 // cout<<"P"<<endl; 306 // P.out(); 307 } 308 void calcP(){ 309 P.a[2][1]+=Fp; 310 // cout<<"calp"<<endl; 311 calPE(1,5);calPE(2,6);calPE(3,9); 312 } 313 void caldelta(){ 314 for(int i=1;i<=NglbDOF;++i){ 315 for(int j=1;j<=NglbDOF;++j){ 316 Cal.a[i][j]=K.a[i][j]; 317 // if(abs(Cal.a[i][j])<eps) Cal.a[i][j]=0.0; 318 } 319 Cal.a[i][NglbDOF+1]=P.a[i][1]; 320 // if(abs(Cal.a[i][NglbDOF+1])<eps) Cal.a[i][NglbDOF+1]=0.0; 321 } 322 // cout<<"cal"<<endl; 323 // Cal.out(); 324 // K.out(); 325 // P.out(); 326 Cal.Gauss(); 327 // Cal.out(); 328 for(int i=1;i<=NglbDOF;++i) 329 Delta.a[i][1]=Cal.a[i][NglbDOF+1]; 330 // cout<<"Delta"<<endl; 331 // Delta.out(); 332 //K.out(); P.out(); 333 // Delta=K*P; 334 // Delta.out(); 335 } 336 void calcF(){ 337 // cout<<"begin"<<endl; 338 for(int i=1;i<=Nelem;++i){ 339 for(int j=1;j<=6;++j) 340 delta[i].a[j][1]=Delta.a[E[i].GlbDOF[j]][1]; 341 // delta[i].out(); 342 } 343 for(int i=1;i<=Nelem;++i){ 344 PFe[i]=PFe[i]+k[i]*delta[i]; 345 // cout<<"i="<<i<<endl; 346 // PFe[i].out(); 347 } 348 } 349 int main(){ 350 init(); //开始数据结构化 351 //cout<<"11111"<<endl; 352 for(int i=1;i<=Nelem;++i) 353 Integration(i); //集成刚度阵 354 // cout<<"2222"<<endl; 355 // K.out(); 356 calcP(); //计算整体结点荷载 357 // cout<<"3333"<<endl; 358 caldelta();//计算整体结点位移 359 // cout<<"4444"<<endl; 360 calcF();//计算单元杆端力向量 361 // cout<<"5555"<<endl; 362 for(int i=1;i<=Nelem;++i){ 363 cout<<"第"<<i<<"根杆件的全局坐标内力值"<<endl; 364 for(int j=1;j<=6;++j) 365 cout<<PFe[i].a[j][1]<<" "; 366 cout<<endl; 367 } 368 // Delta.out(); 369 return 0; 370 }
6/24
卡着ddl开始做一些处理,绘制内力图需要单元杆端力,并编写程序文档。
#include<iostream> #include<fstream> #include<cstdio> #include<algorithm> #include<cmath> #include<string.h> using namespace std; const double eps=1e-12; //计算精度 double EA[3],EI[3]; //梁和柱的强度参数表 double l[4],h[4],q[4],Fp; // 跨长、层高、均布荷载、集中力 int Njoint,Nelem,NglbDOF; //结点数,单元数,结点位移个数 struct Joint{ //结点信息 double x,y; //坐标 int GDOF[5]; //结点位移编码 }J[20]; struct Elem{ //单元信息 int N1,N2; //两个结点 int GlbDOF[8]; //单元定位向量 double len,A,EI,EA; //长度,转角,抗弯刚度,抗拉刚度 }E[15]; struct Matrix{ //便于矩阵运算的方法 int n,m; double a[25][25]; Matrix() { //默认构造函数 n = 0; m = 0; memset(a, 0, sizeof(a)); } void clear(int _n=0,int _m=0){ //初始化函数 n=_n;m=_m; memset(a,0.0,sizeof(a)); } Matrix operator +(const Matrix& b)const {//矩阵加法 Matrix c; c.n=b.n; c.m=b.m; int nn=c.n,mm=c.m; for (int i=1;i<=nn;++i) for (int j=1;j<=mm;++j) c.a[i][j]=a[i][j]+b.a[i][j]; return c; } Matrix operator *(const Matrix& b)const {//矩阵乘法 Matrix c; c.n=n; c.m=b.m; int nn=n,mm=b.m, kk=m; for (int i=1;i<=nn;++i) for (int j=1;j<=mm;++j) for (int l=1;l<=kk;++l) c.a[i][j]+=a[i][l]*b.a[l][j]; return c; } void Gauss() {//高斯消元法 解线性方程组 int r=0; for (int i=1,j=1;i<=n&&j<=n;++i,++j){ int id=0; for (int k=i;k<=n;++k) if (abs(a[k][j])>eps){ id = k; break; } if(!id) --i; else{ for(int k=j;k<=m;++k) swap(a[i][k],a[id][k]); for(int k=m;k>=j;--k) a[i][k]/=a[i][j]; for (int k=i+1;k<=n;++k) if (abs(a[k][j])>eps){ double K_=a[k][j]/a[i][j]; for(int l=j;l<=m;++l){ a[k][l]-= K_*a[i][l]; } } ++r; } } for(int i=n;i>=1;--i) for(int j=i+1;j<=n;++j) a[i][n+1]-=a[j][n+1]*a[i][j]; } }K,_k,k[25],T,TT,P,PFe[25],Fe[25],Cal,Delta,delta[25];// 整体刚度矩阵 单元刚度矩阵 旋转矩阵(和逆矩阵) 整体结点荷载 全局坐标的单元杆端力 局部坐标的单元杆端力 用来gauss消元的矩阵 整体结点位移 每个杆件的结点位移 void init(){ //初始化过程 cin>>Njoint>>Nelem>>NglbDOF; //读入信息 并 进行结构数据化 cin>>EA[0]>>EI[0]>>EA[1]>>EI[1]; for(int i=1;i<=3;++i) cin>>l[i]; for(int i=1;i<=3;++i) cin>>h[i]; cin>>Fp; for(int i=1;i<=3;++i) cin>>q[i]; J[1].x=J[2].x=0; //结点初始化 J[3].x=J[4].x=J[5].x=J[6].x=l[1]; J[7].x=J[8].x=J[9].x=J[10].x=l[1]+l[2]; J[11].x=J[12].x=l[1]+l[2]+l[3]; J[1].y=J[4].y=J[7].y=J[11].y=0; J[12].y=h[3]; J[5].y=J[8].y=J[10].y=h[2]; J[2].y=h[1]; J[3].y=J[6].y=J[9].y=2.0*h[2]; for(int i=1;i<=Njoint;++i) for(int j=1;j<=3;++j) cin>>J[i].GDOF[j]; for(int i=1;i<=Nelem;++i){ //单元初始化 cin>>E[i].N1>>E[i].N2; int opt; cin>>opt; E[i].EA=EA[opt]; E[i].EI=EI[opt]; for(int j=1;j<=3;++j){ E[i].GlbDOF[j]=J[E[i].N1].GDOF[j]; E[i].GlbDOF[j+3]=J[E[i].N2].GDOF[j]; } E[i].len=sqrt(pow(J[E[i].N1].x-J[E[i].N2].x,2)+pow(J[E[i].N1].y-J[E[i].N2].y,2)); double dy=J[E[i].N2].y-J[E[i].N1].y,dx=J[E[i].N2].x-J[E[i].N1].x; if(abs(dx)<eps) dx=eps; E[i].A=8.0*atan(1.0)-atan((dy)/(dx)); k[i].clear(6,6); PFe[i].clear(6,1); delta[i].clear(6,1); } K.clear(NglbDOF,NglbDOF);_k.clear(6,6); //各类矩阵/向量的初始化 T.clear(6,6);TT.clear(6,6); P.clear(NglbDOF,1); Cal.clear(NglbDOF,NglbDOF+1); Delta.clear(NglbDOF,1); } void calT(double _A){ //计算旋转矩阵 T.clear(6,6); TT.clear(6,6); T.a[1][1]=T.a[2][2]=T.a[4][4]=T.a[5][5]=cos(_A); T.a[1][2]=T.a[4][5]=sin(_A); T.a[2][1]=T.a[5][4]=-sin(_A); T.a[3][3]=T.a[6][6]=1.0; for(int j=1;j<=6;++j) for(int l=1;l<=6;++l) TT.a[j][l]=T.a[l][j]; } void Integration(int i){ //集成刚度矩阵 _k.clear(6,6); double _a=E[i].EA/E[i].len; double _b=12.0*E[i].EI/pow(E[i].len,3); double _c=6.0*E[i].EI/pow(E[i].len,2); double _d=4.0*E[i].EI/E[i].len; _k.a[1][1]=_k.a[4][4]=_a; _k.a[1][4]=_k.a[4][1]=-_a; _k.a[2][2]=_k.a[5][5]=_b; _k.a[2][5]=_k.a[5][2]=-_b; _k.a[2][3]=_k.a[3][2]=_k.a[2][6]=_k.a[6][2]=_c; _k.a[3][5]=_k.a[5][3]=_k.a[6][5]=_k.a[5][6]=-_c; _k.a[3][3]=_k.a[6][6]=_d; _k.a[3][6]=_k.a[6][3]=0.5*_d; double _A=E[i].A; calT(_A); k[i]=(TT*_k*T); for(int j=1;j<=6;++j) for(int l=1;l<=6;++l){ int I=E[i].GlbDOF[j],J=E[i].GlbDOF[l]; if(I>0 && J>0) K.a[I][J]+=k[i].a[j][l]; } } void calPE(int qi,int Ei){ //计算单元等效荷载 double l=E[Ei].len,_A=E[Ei].A; calT(_A); PFe[Ei].clear(6,1); PFe[Ei].a[1][1]=0.0; PFe[Ei].a[2][1]=-q[qi]*l/2.0; PFe[Ei].a[3][1]=-q[qi]*l*l/12.0; PFe[Ei].a[4][1]=0.0; PFe[Ei].a[5][1]=-q[qi]*l/2.0; PFe[Ei].a[6][1]=q[qi]*l*l/12.0; PFe[Ei]=(TT*PFe[Ei]); for(int i=1;i<=6;++i) P.a[E[Ei].GlbDOF[i]][1]-=PFe[Ei].a[i][1]; } void calcP(){ //计算整体结点荷载 P.a[2][1]+=Fp; calPE(1,5);calPE(2,6);calPE(3,9); } void caldelta(){ //计算整体结点位移 for(int i=1;i<=NglbDOF;++i){ for(int j=1;j<=NglbDOF;++j){ Cal.a[i][j]=K.a[i][j]; } Cal.a[i][NglbDOF+1]=P.a[i][1]; } Cal.Gauss(); for(int i=1;i<=NglbDOF;++i) Delta.a[i][1]=Cal.a[i][NglbDOF+1]; } void calcF(){ //计算杆端力向量 for(int i=1;i<=Nelem;++i){ for(int j=1;j<=6;++j) delta[i].a[j][1]=Delta.a[E[i].GlbDOF[j]][1]; } for(int i=1;i<=Nelem;++i){ PFe[i]=PFe[i]+k[i]*delta[i]; double _A=E[i].A; calT(_A); Fe[i]=T*PFe[i]; } } int main(){ init(); //开始数据结构化 for(int i=1;i<=Nelem;++i) Integration(i); //集成刚度阵 calcP(); //计算整体结点荷载 caldelta();//计算整体结点位移 calcF();//计算杆端力向量 for(int i=1;i<=Njoint;++i){ cout<<"第"<<i<<"个结点的全局坐标位移值:"<<endl; for(int j=1;j<=3;++j){ if(abs(Delta.a[J[i].GDOF[j]][1])<eps) Delta.a[J[i].GDOF[j]][1]=0.0; cout<<Delta.a[J[i].GDOF[j]][1]<<" "; } cout<<endl; } cout<<endl; for(int i=1;i<=Nelem;++i){ cout<<"第"<<i<<"根杆件的全局坐标内力值:"<<endl; for(int j=1;j<=6;++j){ if(abs(PFe[i].a[j][1])<eps) PFe[i].a[j][1]=0.0; cout<<PFe[i].a[j][1]<<" "; } cout<<endl; } cout<<endl; for(int i=1;i<=Nelem;++i){ cout<<"第"<<i<<"根杆件的单元杆端内力值:"<<endl; for(int j=1;j<=6;++j){ if(abs(Fe[i].a[j][1])<eps) Fe[i].a[j][1]=0.0; cout<<(j<=2?-1:1)*Fe[i].a[j][1]<<" "; } cout<<endl; } return 0; } /* 矩阵位移法大作业 单元数:10 结点数:12 整体结点位移编码:22 结点编码: 1(0,0,1) 2(2,3,4) 3(5,6,7,) 4(0,0,0) 5(8,9,10) 6(5,6,11) 7(0,0,12) 8(13,14,15) 9(16,17,18) 10(13,14,19) 11(0,0,0) 12(20,21,22) 单元定位向量: 柱:0 梁:1 (1) 【0,0,1,2,3,4】 1,2 0 (2)【2,3,4,5,6,7】 2,3 1 (3)【0,0,0,8,9,10】 4,5 0 (4)【8,9,10,5,6,11】 5,6 0 (5)【8,9,10,13,14,15】 5,8 1 (6)【5,6,11,16,17,18】 6,9 1 (7)【0,0,12,13,14,15】 7,8 0 (8)【 13,14,15,16,17,18】 8,9 0 (9)【13,14,19,20,21,22】 10,12 1 (10)【0,0,0,20,21,22】 11,12 0 */ /* 输入文件 in.txt 12 10 22 100000 15000 1000000 10000 3 4 3 4 3 2 20 12 14 10 0 0 1 2 3 4 5 6 7 0 0 0 8 9 10 5 6 11 0 0 12 13 14 15 16 17 18 13 14 19 0 0 0 20 21 22 1 2 0 2 3 1 4 5 0 5 6 0 5 8 1 6 9 1 7 8 0 8 9 0 10 12 1 11 12 0 */
小舟从此逝,沧海寄余生。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号