
mxnet(gluon) 实现DQN简单小例子
参考文献
关于增强学习的基本知识可以参考第二个链接,讲的挺有意思的。DQN的东西可以看第一个链接相关视频。课程中实现了Tensorflow和pytorch的示例代码。本文主要是改写成了gluon实现
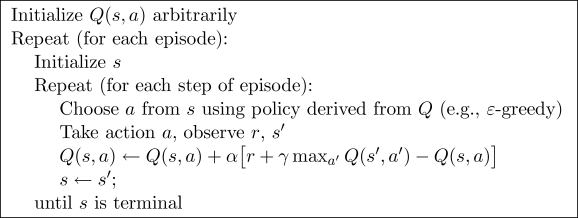
Q-learning的算法流程
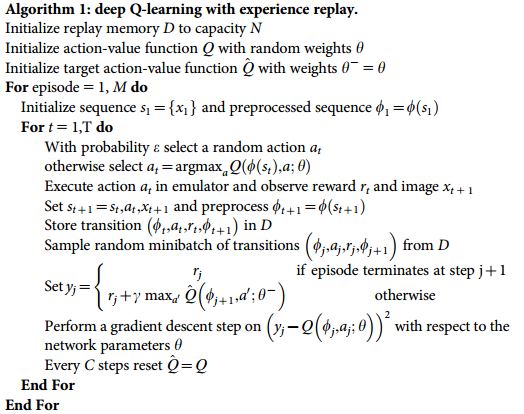
DQN的算法流程
对于DQN的理解:
增强学习中需要学习的东西是Q-table,决策表。而针对于state space空间太大的情形,很难甚至不可能构建这个决策表。而决策表其实就是一种映射 (s,a)->R, 那么这种映射可以通过网络来构建,于是就有了DQN

下面来看代码
import mxnet as mx
import mxnet.ndarray as nd
import mxnet.gluon as gluon
import numpy as np
import mxnet.gluon.nn as nn
import gym
BATCH_SIZE=64 # 训练网络时的batchsize
LR=0.01 # 权重更新的学习率
EPSILON=0.9 # 每次以概率选择最有策略,有点类似于生物算法的思想
GAMMA=0.5 # 计算q_target是下一个状态收益对当前的影响
TARGET_REPLACE_ITER=100 # 保存网络参数,可以理解为上一次的映射,的频率
MEMORY_CAPACITY=1000 # 历史决策
env = gym.make('CartPole-v0') # 调用OpenAI.gym构建的env
env = env.unwrapped
N_ACTIONS=env.action_space.n # 备选策略的个数
N_STATES = env.observation_space.shape[0] # 状态向量的长度
# 定义所需要的网络,示例仅随意设置了几层
class Net(nn.HybridBlock):
def __init__(self,**kwargs):
super(Net, self).__init__(**kwargs)
with self.name_scope():
self.fc1 = nn.Dense(16, activation='relu')
self.fc2 = nn.Dense(32, activation='relu')
self.fc3 = nn.Dense(16, activation='relu')
self.out = nn.Dense(N_ACTIONS)
def hybrid_forward(self, F, x):
x = self.fc1(x)
x = self.fc2(x)
x = self.fc3(x)
actions_value = self.out(x)
return actions_value
# 定义网络权重的拷贝方法。主要是因为DQN learning中采用off-policy更新,也就是说需要上一次的映射图,这可以使用网络上一次的权重保存,这个用以保存权重的网络只有前向功能,类似于查表,并不更新参数,直到满足一定条件时将当前网络参数再次存储
def copy_params(src, dst):
dst.initialize(force_reinit=True, ctx=mx.cpu())
layer_names = ['dense0_weight', 'dense0_bias','dense1_weight','dense1_bias',
'dense2_weight','dense2_bias','dense3_weight','dense3_bias']
for i in range(len(layer_names)):
dst.get(layer_names[i]).set_data(src.get(layer_names[i]).data())
# 定义DQN类,包含网络、策略选择、保存记录等
class DQN(object):
def __init__(self):
self.eval_net, self.target_net = Net(), Net()
self.eval_net.initialize()
self.target_net.initialize()
x=nd.random_uniform(shape=(1,N_STATES))
_ = self.eval_net(x)
_ = self.target_net(x) # mxnet的延迟初始化特性
self.learn_step_counter = 0
self.memory_counter = 0
self.memory = np.zeros(shape=(MEMORY_CAPACITY, N_STATES*2+2))
# 每一行存储的是当前状态,选择的action, 当前的回报, 下一步的状态
self.trainer = gluon.Trainer(self.eval_net.collect_params(), 'sgd',\
{'learning_rate': LR,'wd':1e-4})
self.loss_func = gluon.loss.L2Loss()
self.cost_his=[]
def choose_action(self, x):
if np.random.uniform()<EPSILON:
# EPSILON的概率选择最可能动作
x = nd.array([x])
actions_value = self.eval_net(x)
action = int(nd.argmax(actions_value, axis=1).asscalar())
else:
action = np.random.randint(0, N_ACTIONS)
return action
def store_transition(self,s,a,r,s_):
# 存储历史纪录
transition = np.hstack((s,[a,r],s_))
index = self.memory_counter % MEMORY_CAPACITY
# 主要是为了循环利用存储空间
self.memory[index,:] = transition
self.memory_counter += 1
def learn(self):
if self.learn_step_counter % TARGET_REPLACE_ITER==0:
# 每学习一定间隔之后,将当前的状态
copy_params(self.eval_net.collect_params(), self.target_net.collect_params())
self.learn_step_counter += 1
sample_index = np.random.choice(MEMORY_CAPACITY, BATCH_SIZE)
# 随机选择一组状态
b_memory = self.memory[sample_index,:]
b_s = nd.array(b_memory[:,:N_STATES])
b_a = nd.array(b_memory[:,N_STATES:N_STATES+1])
b_r = nd.array(b_memory[:,N_STATES+1:N_STATES+2])
b_s_= nd.array(b_memory[:,-N_STATES:])
with mx.autograd.record():
q_eval = self.eval_net(b_s) # 预估值
with mx.autograd.pause():
q_next = self.target_net(b_s_) # 历史值 batch x N_ACTIONS
q_target = b_r + GAMMA*nd.max(q_next, axis=1)
loss = self.loss_func(q_eval, q_target)
self.cost_his.append(nd.mean(loss).asscalar())
loss.backward()
self.trainer.step(BATCH_SIZE)
def plot_cost(self):
import matplotlib.pyplot as plt
plt.plot(np.arange(len(self.cost_his)), self.cost_his)
plt.ylabel('Cost')
plt.xlabel('training steps')
plt.show()
# 训练
dqn = DQN()
for i_episode in range(500):
s = env.reset()
while True:
env.render()
a = dqn.choose_action(s)
s_, r, done, info = env.step(a)# 到达的状态,收益,是否结束
x,x_dot, theta, theta_dot = s_
r1 = (env.x_threshold - abs(x))/env.x_threshold - 0.8
r2 = (env.theta_threshold_radians - abs(theta))/env.theta_threshold_radians-0.5
r = r1 + r2
dqn.store_transition(s,a,r,s_)
if dqn.memory_counter > MEMORY_CAPACITY:
dqn.learn()
if done:
break
s = s_
dqn.plot_cost()
loss曲线

训练的loss似乎并没有收敛,还在找原因
ps. 第一次使用open live writer写博客,体验很差!!!!!我需要公式、代码和图片的支持。。。。还在寻找中

