

雷达原理与系统 第十五讲 接收机的动态范围和增益控制
雷达原理与系统 第十五讲 接收机的动态范围和增益控制
0. 改善——
1). 现代接收机对于大的动态范围的要求很高。
2). 动态范围是衡量接收机性能的重要指标,表示了接收机能正常工作所允许的输入信号的强度的范围。
3). 为了防止强信号引起的系统过载,有需要增益控制电路,实现更大的动态范围。
4). 本文介绍了:动态范围、增益控制的概念。
1. 动态范围——
1). 定义:接收机能对接收信号进行检测,而又使接收信号不失真地输入信号大小的范围。
2). 所允许的最小信号输入强度取最小可检测信号功率(实际上是,接收机的灵敏度)。
3). 所允许的最大信号输入强度根据正常工作要求而定。
4). 信号不能太强,否则容易引起接收机饱和、过载;信号不能太弱,否则接收机检测不到。
5). 动态范围:最大信号和最小信号的范围,通常用dB形式表示。
6). 【接收机出现过载时输入信号的功率 : 最小可检测信号功率】比值,称为“动态范围”。
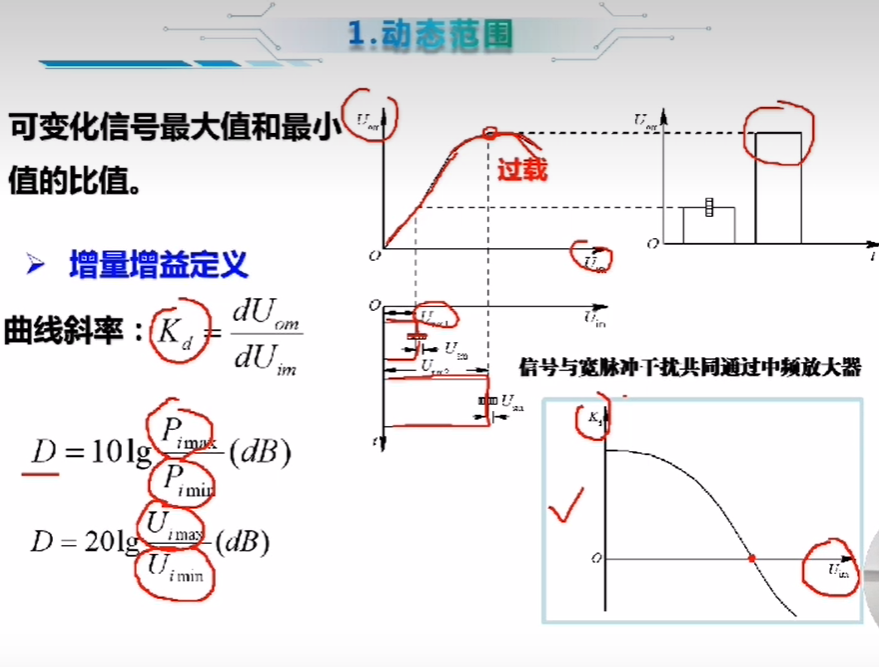
7). 定义方法——
A. 增量、增益定义的动态范围。
a. 当信号电平比较小的时候,输出的电压随着输入电压呈线性增大的趋势,见图1。放大器处于正常工作的范围。
b. 但是当输入信号过强的时候,放大器发生了饱和现象(由于输入信号过强,失去了正常放大的能力)。
c. 过载导致,放大器输出电压不但没有增大,反而出现了下降,使得输出和输入的振幅特性出现了弯曲。这种现象称为,放大器发生过载。
d. 图中表示一个宽脉冲干扰和回波信号共同通过中频放大器的情况。干扰信号中间是一个回波信号,为了简便,只画了包络。
e. 当干扰电压的振幅比较小的时候,输出电压中有与输入信号相对应的增量;但是当干扰电压比较大的时候,放大器发生了饱和,致使输出电压中的信号增量消失了(也就是说,回波信号消失了)。
f. 视频放大器也会发生饱和、过载现象。
g. 对于叠加在干扰上的回波信号,放大量用增量、增益表示。
h. 它是放大器振幅特性曲线的某一点斜率。
i. 我们获得了增益(斜率)与输入电压的变化曲线。
j. 只要是接收机某一级增量的增益小于等于0,此时接收机发生了过载(也就是说,接收机丢失了目标回波信号)。
k. 接收机抗过载性能好坏,用动态范围表示;也就是,当接收机不发生过载时,所允许的信号输入强度变化的范围。
l. 不发生过载时,所允许的接收机输入的最大信号功率、最大输入信号电平;最小可检测信号功率、最小可检测信号电平。
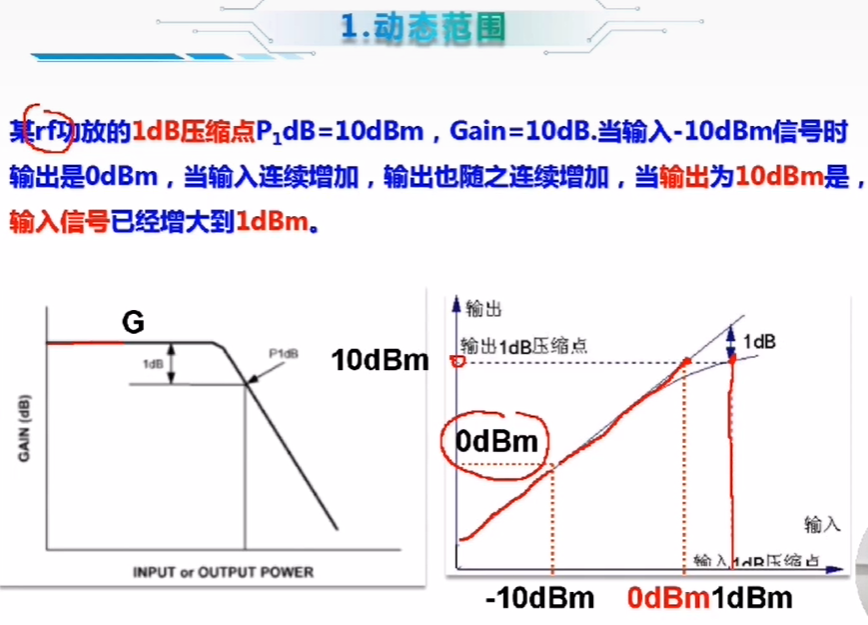
B. 1dB增益压缩点定义的动态范围。
a. 当接收机输出功率产生1dB增益压缩(增益压缩=增益降低、减少)的时候,输入信号功率与最小可检测信号功率之比。
其中,是识别系数(取1),是噪声系数,是接收机带宽,是常温290K,是玻尔兹曼常数。
b. 是指使接收机产生1dB增益压缩的时候,所输入信号功率的大小。
c. 是灵敏度大小。
d. 增益。
e. 分子:输入信号的最大值。
f. 分母:输入信号最低时候接收机输出的信号最大值。
i. 放大器有一个线性动态范围,在范围内放大器的增益保持稳定。
ii. 在保持稳定期间,放大器的输出功率是随着输入功率线性增强。
iii. 但是当输入功率持续增加的时候,放大器会在某一个时间点进入非线性区间,此时放大器输出功率不在随着输入功率的增加而线性增加。
iv. 也就是说,输出功率小于信号增益预计的值。通常我们将下降到比线性增益低1dB时候的输出功率值定义为输出功率的1dB压缩点,用P_{1dB}表示。
g. 过了1dB压缩点并不是说输入信号增加,输出功率不增加了,而是说增益的线性度急剧恶化。输入和输出不是呈现线性关系了。
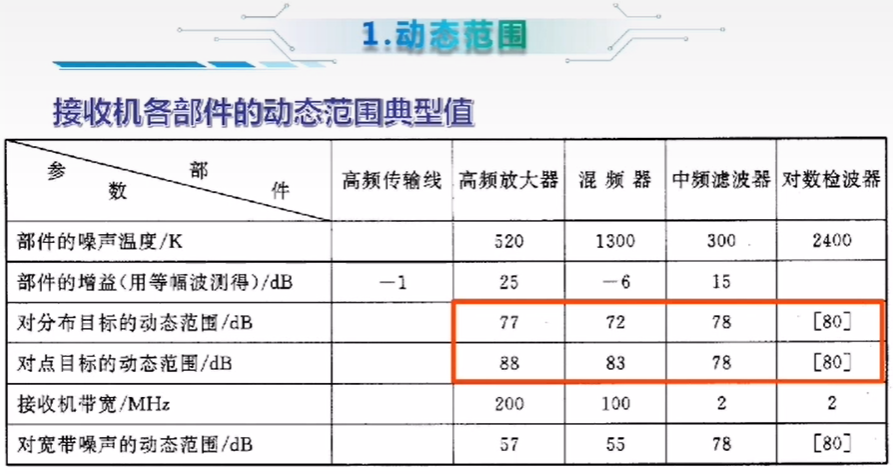
h. 通过表格可以判断哪些部件会影响接收机动态范围。
i. 动态范围用各个部件输出端最大信号与xx噪声电平进行比较,而不是最小可检测信号,对于各个独立部件而言。
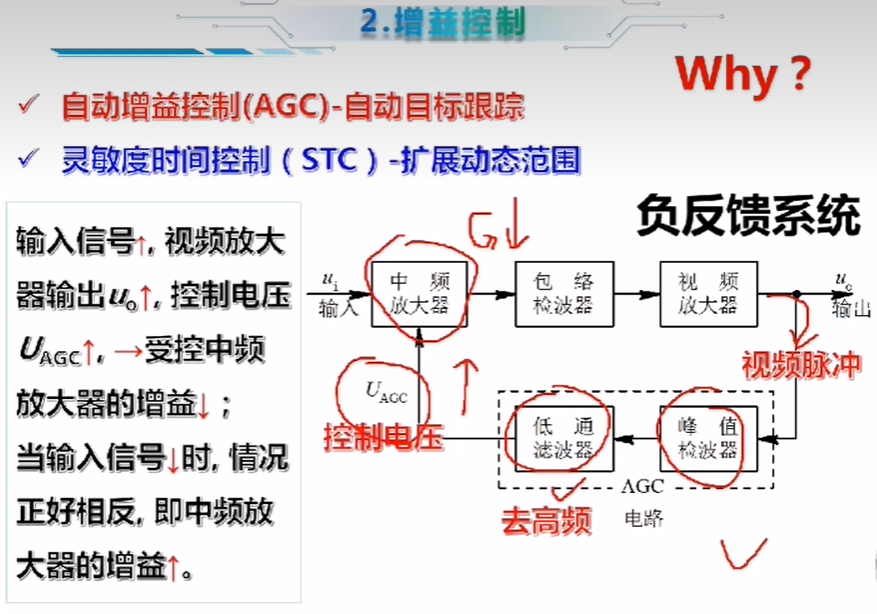
2. 增益控制——
1). 为什么要增益控制?在追求更大接收机动态范围的同时,为了防止强信号引起接收机过载而采取的措施。
2). 分类——
A. 自动增益控制(AGC)
B. 灵敏度时间控制(STC)
3). 例如,在跟踪雷达中,为了保证对目标自动方向的跟踪,他要求接收机输出角误差信号强度,只与目标偏离天线轴线的夹角有关系,与目标远近、反射面积、RCS没有关系。为了获得归一化角误差信号,使天线能正确跟踪运动目标,必须采取自动增益控制的措施。
4). 自动增益控制(AGC),是指放大电路增益随着信号强度的调制,而进行自动控制的方法。
5). 可以对放大器增益进行自动调节,在实际应用中,可以实现自动测角。核心工作原理,让接收机的增益随着时间、距离增加而增加。
6). AGC由一级峰值检波器+低通滤波器组成。
7). 接收机输出的视频信号,通过峰值检波器之后,再由低通滤波器把高频分量去掉,获得了自动增益控制电压。
8). 控制电压加入到中频放大器,完成了增益自动控制的作用。
9). 当输入信号增大的时候,视频脉冲会增加,从而引起控制电压增加,使得受控的中频放大器的增益降低。将输入信号减少的时候,情况相反。
10). 自动增益控制(AGC)是负反馈系统。
C. 瞬时自动增益控制(IAGC)
a. 瞬时自动增益控制(IAGC)的目的是使——
i. 干扰电压受到衰减(即要求控制电压能瞬时地随着干扰电压而变化)。
ii. 而维持目标信号的增益尽量不变。
iii. 防止——
I. 等幅波干扰
II. 宽带脉冲干扰
III. 低频调幅波干扰
b. IAGC原理与AGC相似,都是通过反馈,将输出电压检波以后去控制中频放大器,调整放大能力。
c. 干扰电压相比信号都是很强的,所以中频放大器末级可能有过载的危险,前几级可能也有过载。
d. 为了获得更好的抗干扰效果,增大允许干扰电压的范围,可以在中频放大的末级或者相邻前几级都加上IAGC。
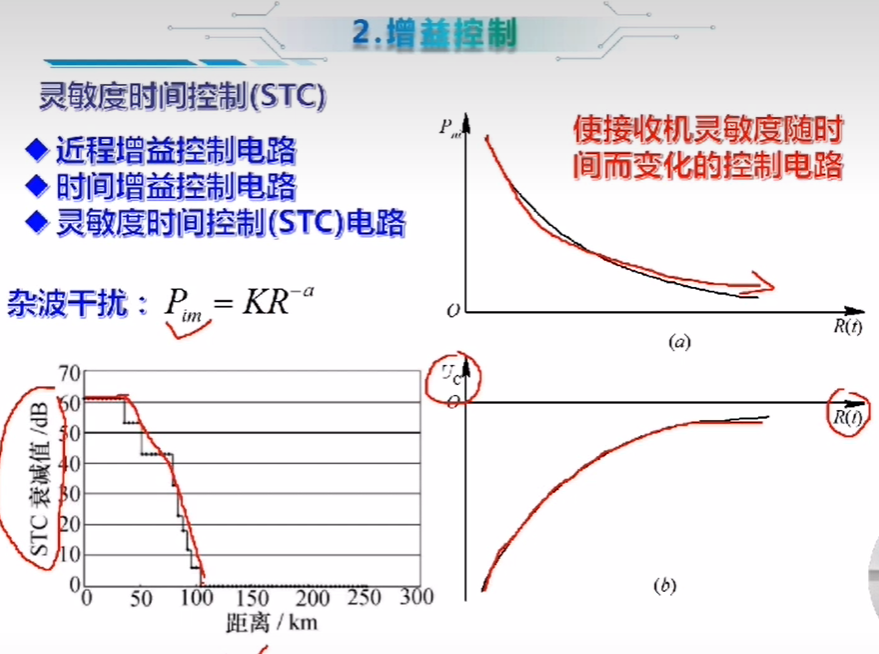
B. 灵敏度时间控制(STC)——
a. 目的——
i. 扩展接收机动态范围
ii. 防止近程杂波使接收机过载
b. STC也叫近程增益控制。
c. 它是随着作用距离,而降低接收机灵敏度的技术。
d. STC使接收机不受到近程杂波干扰而发生过载、饱和。
e. 在远距离的时候,使接收机保持原来的增益和原来的灵敏度,保证正常发现、检测小目标回波。
f. STC核心原理是,每当发射机发射信号之后,接收机产生一个与干扰功率随着时间变化规律相匹配的控制电压。控制接收机的增益按比例规律的变化。
g. 通常海杂波、地杂波的干扰,主要出现在距离接收机天线很近的地方。
h. 干扰功率随着距离增加而相对平滑地减小。
i. 如果把发射信号的时刻作为距离起点,横轴是时间轴,那么海杂波的干扰功率,其中是比例常数,和雷达发射功率相关,是距离,是试验系数与天线的参数、性质有关系,。
j. 基本原理——
i. 当发射机每一次发射完信号之后,接收机产生一个与干扰功率随时间变化相匹配的控制电源,去控制接收机增益按照-的规律进行变化。
ii. 近程增益控制电路实际上是,使接收机灵敏度随时间变化而变化的控制电路。
iii. 可以使接收机不受到近距离杂波的干扰而过载。
k. STC通常用数控衰减器完成,控制相当灵活,能根据杂波环境确定控制量,可以在射频、中频工作,使接收机动态范围大大提高。
l. STC设在射频比中频能使接收机有更大的拓展。
m. 由于射频频率较高,保持STC平坦度有难度。
n. STC设置(前段)位置的不同对于整个接收系统影响不一样。
o. 需要对于接收机总的动态范围要求、接收机所能达到的线性动态的范围综合考虑。
p. 相对于AGC是负反馈,AGC雷达根据回波强弱自动进行增益调整,回波强:增益减低,回波弱:增益提高。一般AGC设置在中频。
q. 接收机可以使用AGC补偿接收机增益的不稳定。
r. 不稳定的原因——
i. 电源电压不稳定
ii. 环境变化
iii. 工作参数变化
s. 多通道的AGC实现对于各个接收机通道的增益平衡。
11). 总结AGC、STC——
A. AGC、STC都是增益控制。
B. 目的——
a. 提高雷达接收机的动态范围。
b 防止接收机饱和。
c. 更好地发现、检测小目标。
C. STC主要与时间、距离有关系。实际可以通过雷达部署的环境进行控制策略的实现。
D. AGC主要与回波强度相关,进行自动控制。
感谢 https://www.cnblogs.com/sunny99/ sumoier对本文的帮助!


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Manus爆火,是硬核还是营销?
· 终于写完轮子一部分:tcp代理 了,记录一下
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通