STM32驱动 有刷电机 位置,速度,电流,三环控制
PID算法:
位置式PID:


离散化位置式PID:

增量式PID:

增量式和位置式PID程序:
int32_t Increment_PID_Control(PID_TypeDef *PID,float Feedback_value)
{
PID->Error = (float)(PID->SetPoint - Feedback_value);//偏差e
if((PID->Error >= -5)&&(PID->Error<=5)) /*限定闭环死区*/
{
PID->Error = 0;
}
PID->ActualValue += (PID->Proportion * (PID->Error - PID->LastError)) /* 比例环节 */
+ (PID->Integral * PID->Error) /* 积分环节 */
+ (PID->Derivative * (PID->Error - 2 * PID->LastError + PID->PrevError)); /* 微分环节 */
PID->PrevError = PID->LastError; /* 存储偏差,用于下次计算 */
PID->LastError = PID->Error;
if(PID->ActualValue < -6000){PID->ActualValue=-6000;}
else if(PID->ActualValue > 6000){PID->ActualValue=6000;}//6000 是PWM 占空比上限
return ((int32_t)(PID->ActualValue));
}
int32_t Positional_PID_Control(PID_TypeDef *PID,float Feedback_value)
{
PID->Error = (float)(PID->SetPoint - Feedback_value);//偏差e
if((PID->Error >= -5)&&(PID->Error<=5)) /*限定闭环死区*/
{
PID->Error = 0;
}
if(PID->Error > -1500 && PID->Error < 1500) /*积分分离,误差较大时去掉积分项作用*/
{
PID->SumError += PID->Error; /*误差累加(积分)*/
if(PID->SumError > 500) /*积分限幅,防止积分饱和*/
{
PID->SumError = 500;
}
else if(PID->SumError < -500)
{
PID->SumError = -500;
}
}
PID->ActualValue = (PID->Proportion * PID->Error) /* 比例环节 */
+ (PID->Integral * PID->SumError) /* 积分环节 */
+ (PID->Derivative * (PID->Error - PID->LastError)); /* 微分环节 */
PID->LastError = PID->Error;
if(PID->ActualValue < -6000){PID->ActualValue=-6000;}
else if(PID->ActualValue > 6000){PID->ActualValue=6000;}//6000 是PWM 占空比上限
return ((int32_t)(PID->ActualValue));
}- 位置式需防积分饱和,增量式不会产生积分饱和
- 为了解决积分饱和的问题,引入了抗积分饱和的PID算法。在计算U(k)的时候,先判断上一时刻的控制量U(k-1)是否已经超出了限制范围。若U(k-1)>Umax,则只累加负偏差;若U(k-1)<Umin,则只累加正偏差。从而避免控制量长时间停留在饱和区
-
在饱和的时候将积分器的累计值初始化到一个比较理想的值;
-
将积分累计量限制上下限,避免积分累计量超过限制值;
PID三环串联:
1. 设定位置值 传入位置环,
2. 位置环输出结果,对结果进行限制,作为速度环的设定值,对位置环结果的限制就是对速度的限制
3. 获取速度值,计算速度环,
4. 速度环输出结果,对结果进行限制,作为电流环的设定值,对速度环结果的限制就是对电流的限制
5. 获取电流值,计算电流环
6. 电流环结果传入PWM控制,
7. 最终控制电机 位置,速度,电流
// /******************************************************三环控制*********************************************************/
/************获取实时数据****************/
BDCM_Position = Encoder_Get_Position(); //计算位置
BDC_speed_r_min = Encoder_Get_Speed(); //计算速度
BDCM_Current_Now = Get_BDCM_A(); //获得电流
if((BDCM_Position_PID.SetPoint < BDCM_Position-500) || (BDCM_Position_PID.SetPoint > BDCM_Position+500))//位置有偏差,进入PID计算
{
/***************************************位置环*******************************/
BDCM_PWM_Period = Positional_PID_Control(&BDCM_Position_PID,BDCM_Position);//进行位置PID计算
/**********限制位置环结果,作为速度设置值*************/
#define BDCM_SPEED_PID_SET_POINT 100
if(BDCM_PWM_Period < -BDCM_SPEED_PID_SET_POINT){BDCM_PWM_Period=-BDCM_SPEED_PID_SET_POINT;}
else if(BDCM_PWM_Period > BDCM_SPEED_PID_SET_POINT){BDCM_PWM_Period=BDCM_SPEED_PID_SET_POINT;}//位置PID结果限制,对应速度值
BDCM_Speed_PID.SetPoint = BDCM_PWM_Period;//位置PID结果 传入 速度PID设置值
if(BDCM_Speed_PID.SetPoint != 0)//目标速度不为零,进入速度PID计算
{
/****************************************速度环******************************/
BDCM_PWM_Period = Increment_PID_Control(&BDCM_Speed_PID,BDC_speed_r_min);//速度PID计算
/***********速度PID结果控制电流设置值,限制速度环结果,作为电流环设置值*************/
#define BDCM_CURRENT_PID_SET_POINT 30
if(BDCM_PWM_Period < -BDCM_CURRENT_PID_SET_POINT){BDCM_PWM_Period=-BDCM_CURRENT_PID_SET_POINT;}
else if(BDCM_PWM_Period > BDCM_CURRENT_PID_SET_POINT){BDCM_PWM_Period=BDCM_CURRENT_PID_SET_POINT;}//速度环PID结果限制,对应电流环值
BDCM_Current_PID.SetPoint = BDCM_PWM_Period;
/*****************************************电流环*********************************/
BDCM_PWM_Period = Increment_PID_Control(&BDCM_Current_PID,BDCM_Current_Now);//电流PID
if(BDCM_Speed_PID.SetPoint>0)
{
BDCM_Set(1,BDCM_PWM_Period);
}
else
{
BDCM_Set(0,-BDCM_PWM_Period);
}
}
}else
{
BDCM_Speed_PID.SetPoint = 0;
BDCM_Current_PID.SetPoint = 0;
BDCM_PWM_Period = 0;
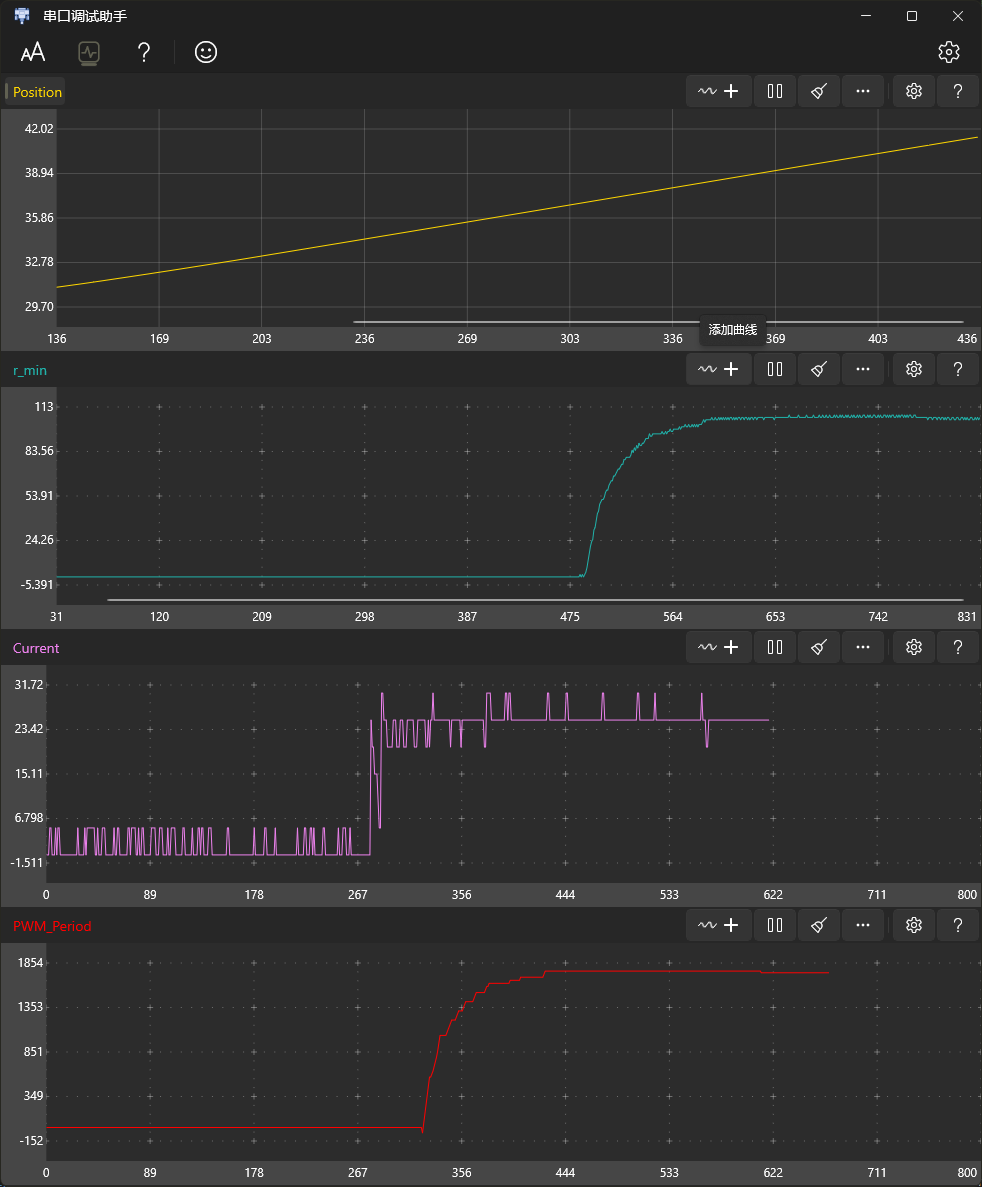
}控制结果:
速度保持100r/min
电流保持30mA

 浙公网安备 33010602011771号
浙公网安备 33010602011771号