
通讯问题汇总
一、can问题
1.1 can无法接收和发送数据
1、波特率不匹配
2、终端电阻没接或不匹配
3、can协议不一致,一个是can 2.0 另一个是can fd
1.2 丢包
1、排除是否因为自动驾驶控制器发送丢包
测试方法:自动驾驶控制器不接入车辆,单独测试自动驾驶控制器是否丢包。或则用can工具模拟发送can报文,用第三方工具来测试是否会丢包
2、排查是否因为can 总线过载导致丢包
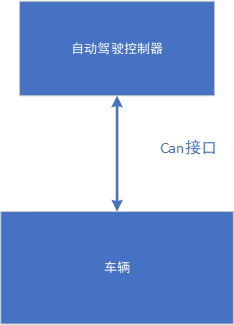
1.3 车辆认为自动驾驶控制器掉线,实际自动驾驶控制器正常工作
自动驾驶控制器和车辆通常会约定一个心跳包,车辆通过这个心跳包来判断自动驾驶控制器是否在线。例如约定的心跳包是20ms一次,如果车辆在一个大于20ms之内的时间无法接收到心跳包则认为自动驾驶控制器掉线,转入人工驾驶模式。正常情况下车辆接收到的心跳包间隔不会超过20ms,旦如果出现丢包情况,就会出现这个问题。这个问题的排查方法和1.2一致。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号