有向图的拓扑排序——BFS
假设你有n个任务要做,其中某些任务需要在另外一些任务之前完成,你该如何规划你的任务,使得按照你的规划依次做下去就能完成你的所有任务?
定义
拓扑排序(Topological sorting, toposort):给定一个有向无环图,将所有节点排成一个线性序列,在这个序列中只有从前面的节点指向后面的节点的边。
条件
有向图中没有环。如果有环的话就无法进行拓扑排序。因为如果尝试将所有节点排成一个线性序列的话,就必然会出现这种情况:
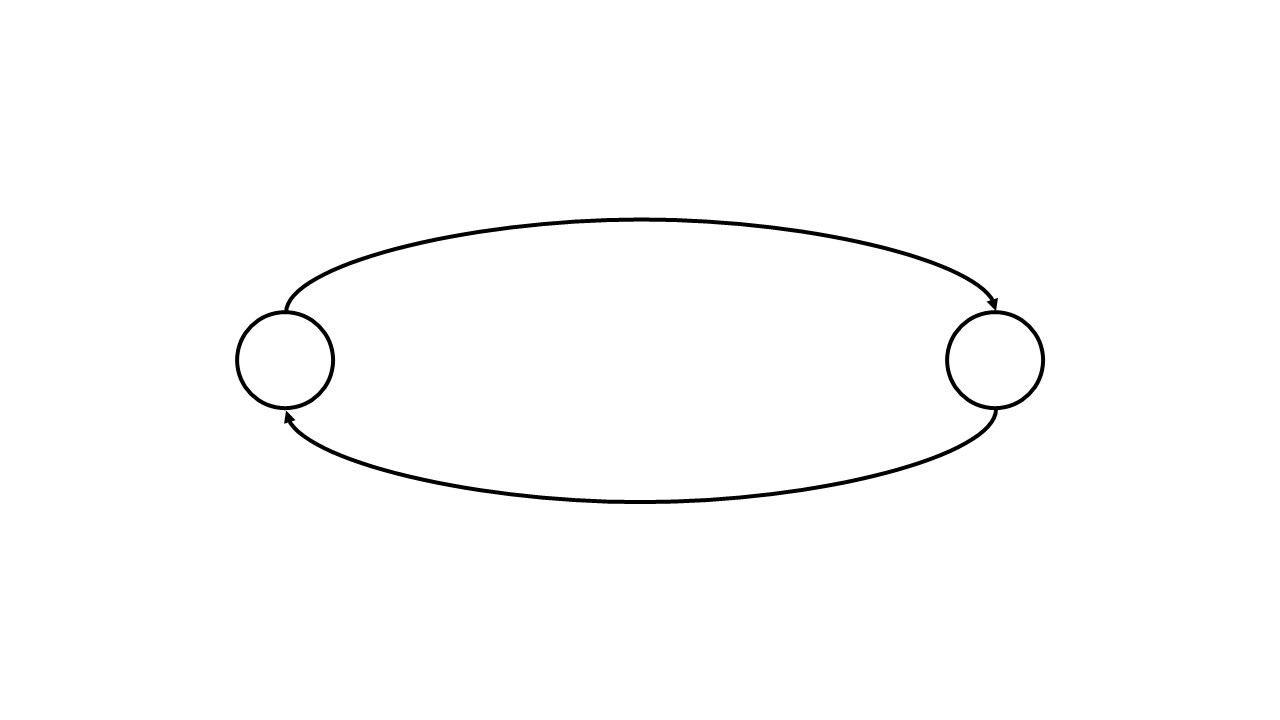
必然有从后面的节点指向前面的节点的有向边,不符合拓扑排序的定义,所以无法对有环的有向图进行拓扑排序。
假如你手边有两个任务A和B,要完成任务A你得先完成任务B,要完成任务B你又得先完成任务A,你一定会觉得这很刁钻,对吧?
注意一张图的拓扑排序并不是唯一的,比如下面这张图:
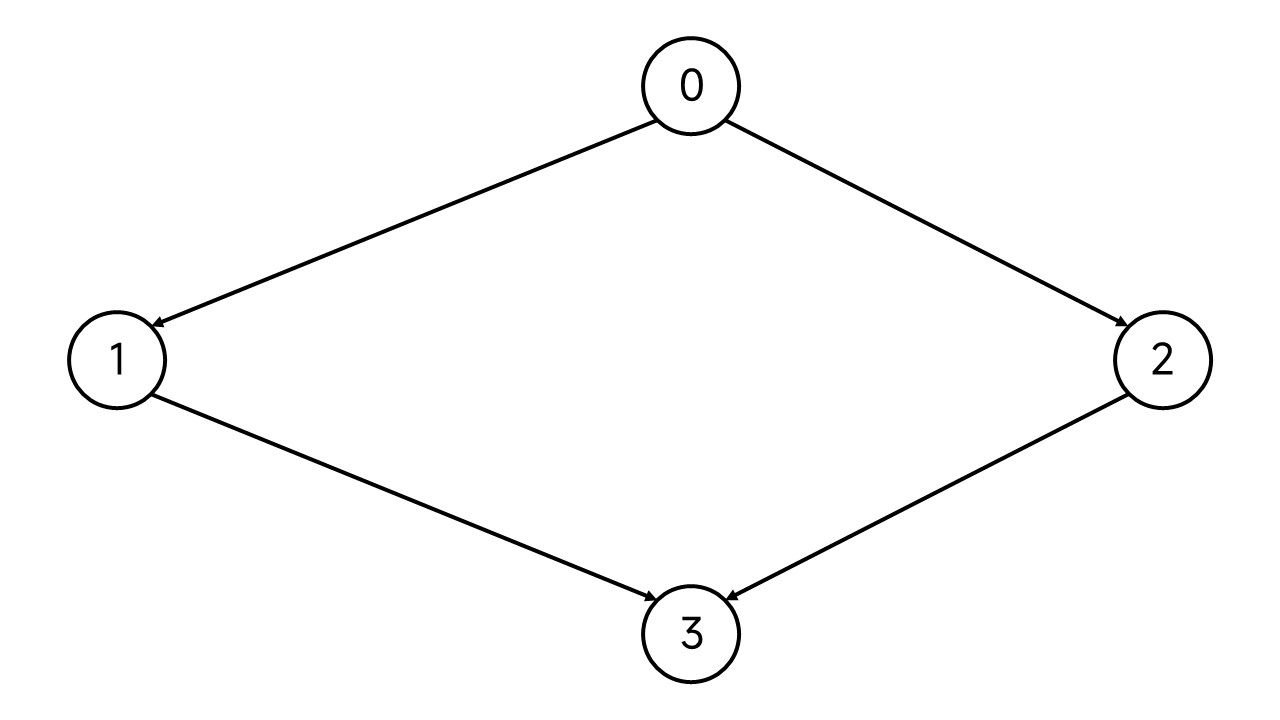
序列 0 1 2 3 和 0 2 1 3 均是合法的拓扑排序序列,只要1和2出现在0之后3之前即可,内部的顺序无所谓。
方法
拓扑排序有多种方法,BFS(广度优先搜索)是其中的一种。
以下面这张图为例:
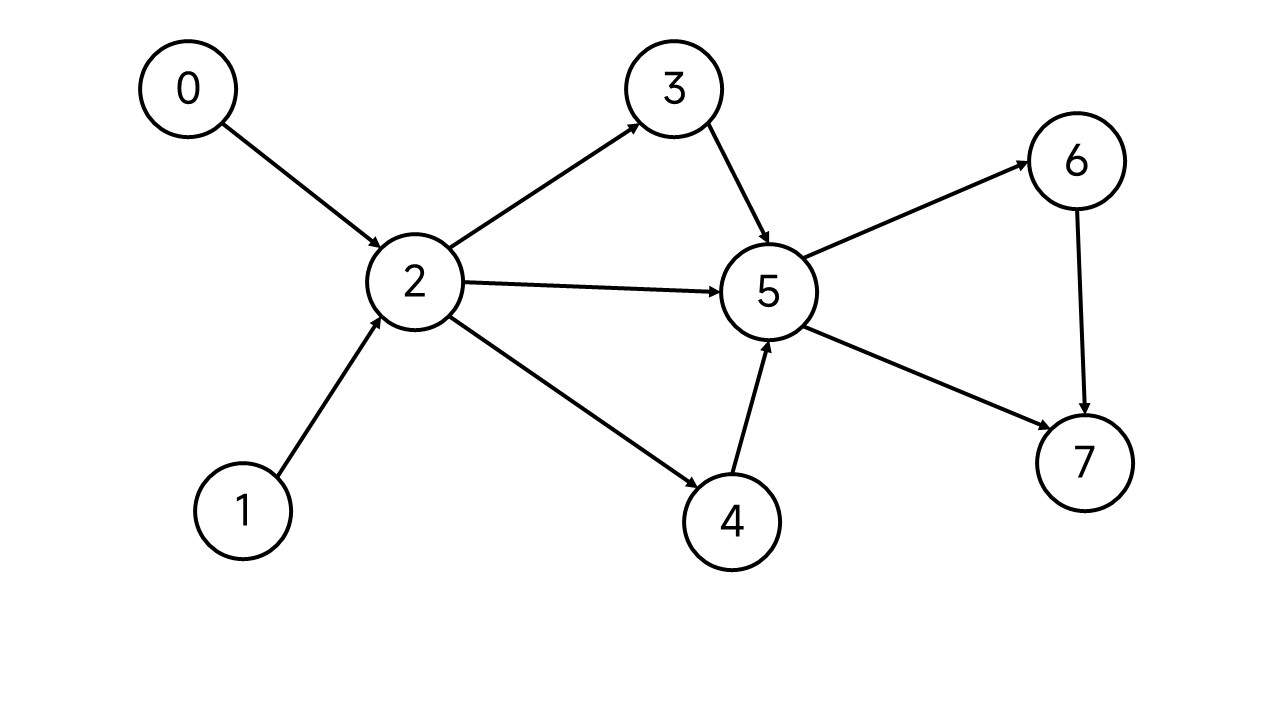
最先完成的任务之前没有需要完成的任务,用图论的语言来说就是拓扑排序序列的第一个节点没有入边,入度为0。在这张图中,入度为0的节点有两个:节点0和节点1,将这两个节点添加到序列中。
任务完成之后,就不需要考虑了,我们可以直接将这两个节点从图中移除。
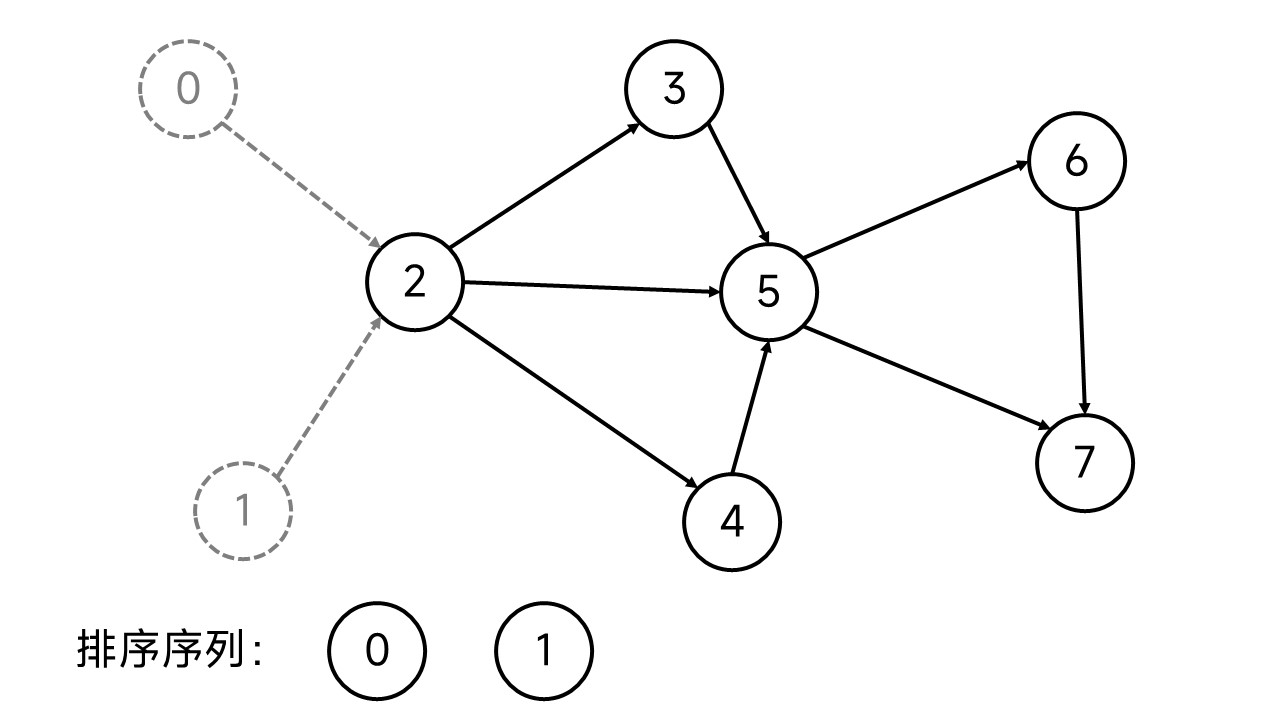
这时,节点2就变成0入度节点了,继续同样的步骤。一直这样重复下去,直到图中没有剩余的节点为止。这样,我们就得到了这样一个拓扑排序序列:
0 1 2 3 4 5 6 7
所以,整个拓扑排序算法如下:
- 寻找0入度节点,从图中移除并添加到拓扑排序序列。
- 重复上述步骤,直到图中没有剩余的节点。
算法及代码实现
为了使语义更加明确,我们先定义类型别名node_t,代表unsigned long long:
using node_t = unsigned long long;
因为整个算法主要利用的是两个节点之间的邻接关系,我们在这里使用邻接表来表示整个图。同时使用邻接表需要的空间花销更少。
class Graph {
unsigned long long n;
vector<vector<node_t>> map;
public:
Graph(initializer_list<initializer_list<node_t>> list) : n(list.size()), map({}) {
for (auto &l : list) {
map.emplace_back(l);
}
}
vector<node_t> toposort();
};
为了不破坏整个图的结构,我们单独开一个数组来存放所有节点的入度。伪代码如下:
初始化入度数组S
for (节点v : 节点集合V) {
for (节点v’ : 以节点V为起点的所有有向边的终点集合V’) {
S[v’]++
}
}
代码:
vector<node_t> inDegrees(n, 0);
for (auto &ends : map) {
for (node_t end : ends) {
inDegrees[end]++;
}
}
注意到某一时刻0入度节点可能不止1个,因此我们需要某种数据结构来“暂存”这些0入度节点。又注意到0入度节点总是先出现后被移除并加入到序列,因此我们的Mr. Right就是具有“先入后出”性质的队列。
伪代码:
初始化队列Q
for (节点v : 节点集合V) {
if (节点v的入度为0) {
将节点v加入到队列Q中
}
}
代码:
queue<node_t> zeroInDegree;
for (node_t node = 0; node < n; node++) {
if (inDegrees[node] == 0) {
zeroInDegree.push(node);
}
}
接下来,我们只需要将队列头部节点移除并加入到排序序列,并相应的更新该节点指向的节点的入度。如果指向的节点的入度减为零了,那就添加到队列中。
伪代码:
令队列Q的头部节点为v’
将v’弹出队列并加入到拓扑排序序列
for (节点v’’ : v’指向的所有节点集合) {
v’’的入度减一
if (v’’的入度 == 0) {
将v’’加入队列Q
}
}
代码:
node_t v = zeroInDegree.front();
zeroInDegree.pop();
sort.push_back(v);
for (node_t end : map[v]) {
inDegrees[end]--;
if (inDegrees[end] == 0) {
zeroInDegree.push(end);
}
}
如此重复下去,如果队列变空了,则说明已经将所有的节点都加入到序列中了,算法结束。
整个算法的伪代码:
初始化入度数组S、队列Q和拓扑排序序列T
for (节点v : 节点集合V) {
for (节点v’ : 以节点V为起点的所有有向边的终点集合V’) {
S[v’]++
}
}
for (节点v : 节点集合V) {
if (S[v’] == 0) {
将节点v加入到队列Q中
}
}
令队列Q的头部节点为v’
将v’弹出队列并加入到拓扑排序序列
for (节点v’’ : v’指向的所有节点集合) {
S[v’’]--
if (S[v’’] == 0) {
将v’’加入队列Q
}
}
代码:
vector<node_t> Graph::toposort() {
vector<node_t> inDegrees(n, 0);
queue<node_t> zeroInDegree;
vector<node_t> sort;
for (auto &ends : map) {
for (node_t end : ends) {
inDegrees[end]++;
}
}
for (node_t node = 0; node < n; node++) {
if (inDegrees[node] == 0) {
zeroInDegree.push(node);
}
}
while (!zeroInDegree.empty()) {
node_t v = zeroInDegree.front();
zeroInDegree.pop();
sort.push_back(v);
for (node_t end : map[v]) {
inDegrees[end]--;
if (inDegrees[end] == 0) {
zeroInDegree.push(end);
}
}
}
return sort;
}
测试:
int main() {
Graph graph{
{2},
{2},
{3, 4, 5},
{5},
{5},
{6, 7},
{7},
{}
};
auto sort = graph.toposort();
for (auto node : sort) {
cout << node << ' ';
}
cout << endl;
return 0;
}
复杂度分析
时间复杂度:O(n+e),其中n为顶点数,e为边数。这主要取决于寻找0入度节点所需要的时间花销。
空间复杂度:O(n+e),其中n为顶点数,e为边数。这主要取决于邻接表所需要的空间花销。
本文来自博客园,作者:YVVT_Real,转载请注明原文链接:https://www.cnblogs.com/YWT-Real/p/16968571.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号