几何建模与处理之三 参数曲线
几何建模与处理之三 参数曲线
在前两节中,学习了一元(单变量)函数\(f:R^1\to R^1\quad y=f(x)\)的数据拟合方法。接下下学习多元函数及多元函数的数据拟合。
多元函数
多元,即多变量,函数形式如下:
多元函数的基函数构造需要引入张量积的概念。
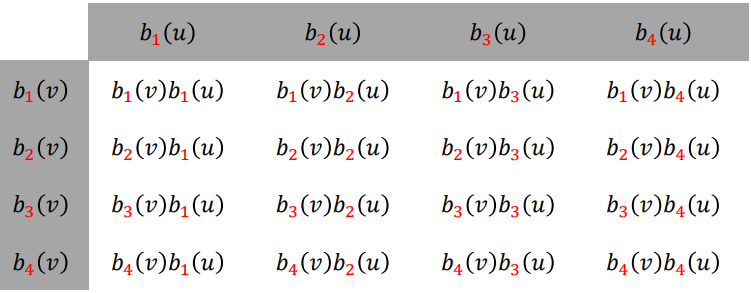
张量积
定义:多个一元基函数的乘积形式
优点:定义简单
不足:随着维数增加,基函数个数急剧增加,导致变量技据增加(求解系统规模急剧增加,求解代价大)
二元函数的基函数:即用两个一元函数的基函数的相互乘积来定义
例: 二次二元多项式函数\(z=f(x,y)\)的基函数\(\lbrace 1,x,y,x^2,xy,y^2\rbrace\)
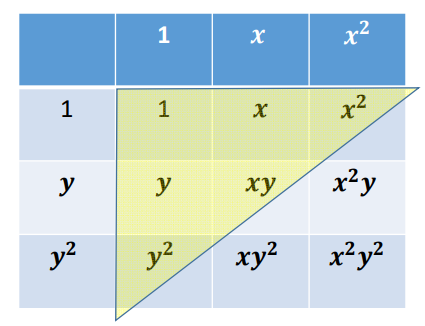
张量积基函数:
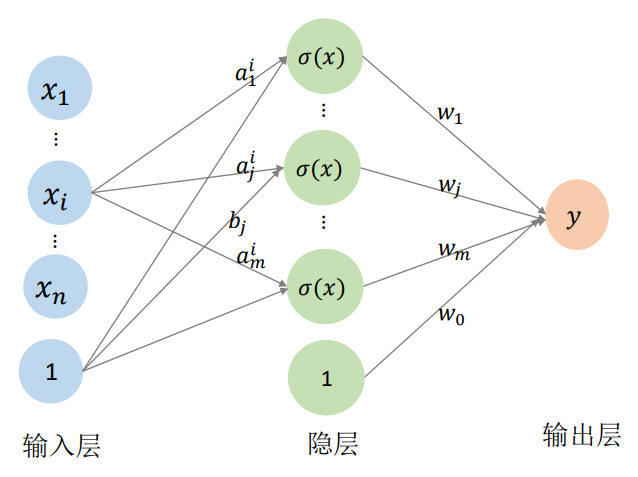
多元函数的神经网络表达
用一个单变量函数\(\sigma(x)\)(激活函数)的不同仿射变换构造“基函数”:基函数数目可控
向量值函数
向量值,即多个应变量
单变量向量值函数:
看成多个单变量函数,各个函数独立无关
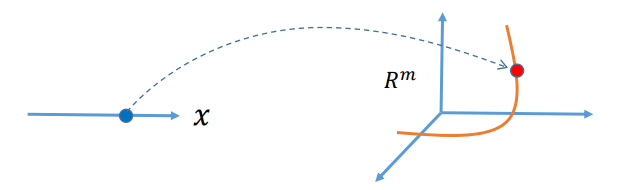
几何解释:
一个实数\(x\in R^1\)映射到\(m\)维空间\(R^m\)的一个点,轨迹构成\(R^m\)的一条“曲线”,本质维度为1
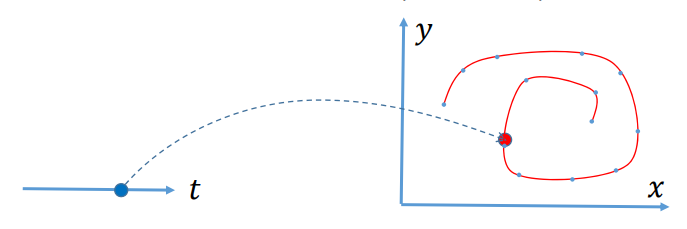
平面参数曲线
函数形式:
几何解释:
一条曲线由一个变量参数𝑡决定,也称为单参数曲线,参数𝑡可看成该曲线的“时间”变量,可灵活表达非函数型的曲线(任意曲线)。
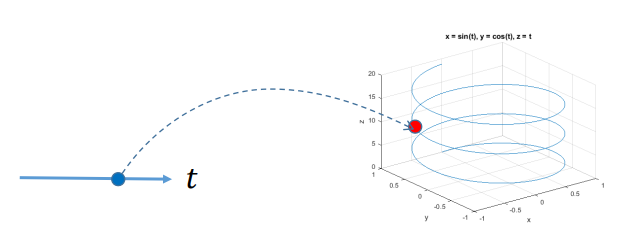
空间参数曲线
函数形式:
几何解释:
一条曲线由一个变量参数𝑡决定,也称为单参数曲线,参数 𝑡可看成该曲线的“时间”变量,可灵活表达非函数型的曲线(任意曲线)。
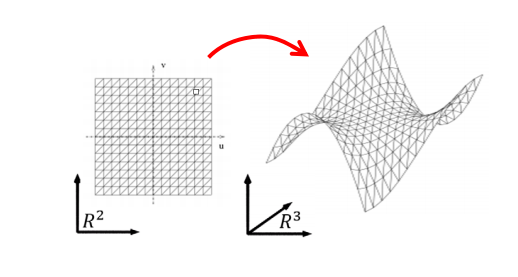
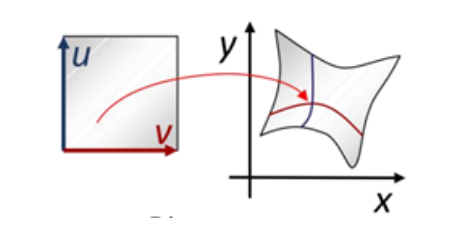
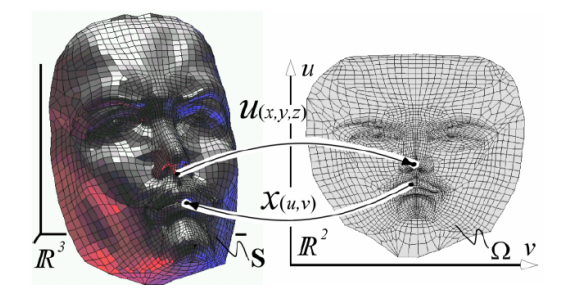
参数曲面
几何解释:
一张曲面由两个参数ሺ𝑢, 𝑣ሻ决定,也称为双参数曲面, 可灵活表达非函数型的任意曲面。
二维映射
几何解释:
二维区域之间的映射,可看成特殊的曲面(第三个维度始终为 0 )
应用:图像变形
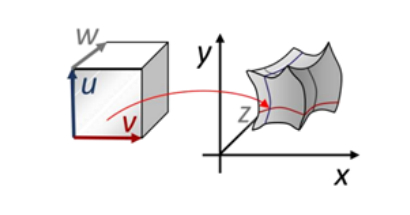
三维映射
几何解释:
三维体区域之间的映射
应用:体形变、体参数化
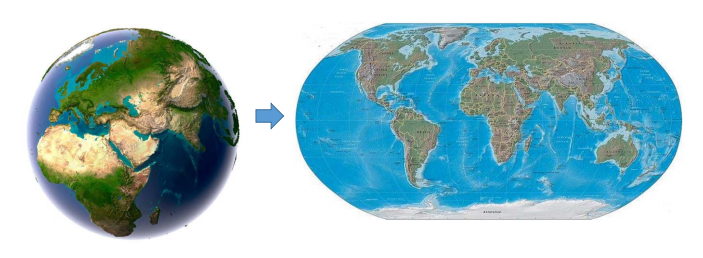
降维映射(低维映射)
降维映射一般有信息丢失,丢失的信息大部分情况下不可逆,即无法恢复
一般映射
如果\(n\lt m\),为低维到高维的映射(高维的超曲面,n维流形曲面),本征维度为n。如果\(n\lt m\),为降维映射,一般信息有损失, 如果\(R^n\)中的点集刚好位于一个𝑚 维(或小于𝑚 )的流形上,则映射可能是无损的,即可以被恢复的。
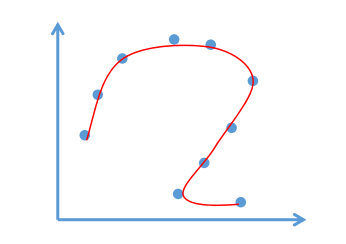
曲线拟合
曲线拟合问题
输入:给定平面上系列点\((x_i,y_i),i=1,2,\dots,n\)
输出:一条参数曲线,拟合这些点
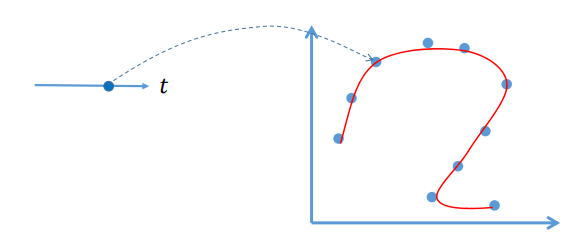
问题:对数据点\((x_i,y_i)\),对应哪个参数\(t_i\)?
误差度量:\(E=\sum_{i=1}^n \begin{Vmatrix} \begin{pmatrix}x(t_i)\\y(t_i)\end{pmatrix}-\begin{pmatrix}x_i\\y_i\end{pmatrix}\end{Vmatrix}^2=\begin{Vmatrix} \mathbf p(t_i)-\mathbf p_i\end{Vmatrix}^2\) \(\mathbf p=\mathbf p(t)=\begin{pmatrix}x(t)\\y(t)\end{pmatrix}\)
参数化问题
求数据点所对应的参数:一个降维的问题!
点列的参数化方法
- Equidistant (uniform) parameterization 均匀参数化
\(t_{i+1}-t_i=const\)
\(e.g.t_i=i\)
Geometry of the data points is not considered
不考虑数据点的几何形状。
- Chordal parameterization 弦长参数化
\(t_{i+1}-t_i=\begin{Vmatrix} k_{i+1}-k_i\end{Vmatrix}\)
Parameter intervals proportional to the distances ofneighbored control points
参数间隔与相邻控制点的距离成正比
-
Centripetal parameterization 向心参数化
\(t_{i+1}-t_i=\sqrt{\begin{Vmatrix} k_{i+1}-k_i\end{Vmatrix}}\)
-
Foley parameterization Foley参数化
lnvolvement of angles in the control polygon
控制多边形中角的变化\(t_{t+1}-t_i=\begin{Vmatrix} k_{i+1}-k_i\end{Vmatrix}·(1+\frac32\frac{\hat a_i\begin{Vmatrix} k_{i}-k_{i-1}\end{Vmatrix}}{\begin{Vmatrix} k_{i}-k_{i-1}\end{Vmatrix}+\begin{Vmatrix} k_{i+1}-k_i\end{Vmatrix}}+\frac32\frac{\hat a_{i+1}\begin{Vmatrix} k_{i+1}-k_{i}\end{Vmatrix}}{\begin{Vmatrix} k_{i+1}-k_{i}\end{Vmatrix}+\begin{Vmatrix} k_{i+2}-k_{i+1}\end{Vmatrix}})\)
\(\hat a_i=\min(\pi-a_i,\frac\pi 2)\)
\(a_i=\angle(k_{i-1},k_i,k_{i+1})\)
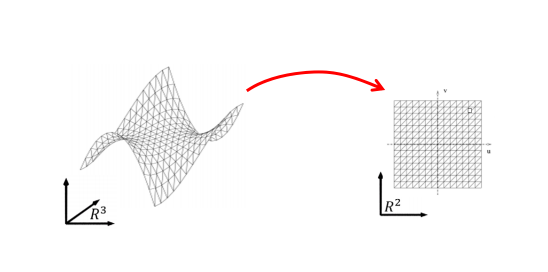
曲面参数化
三维的点找二维的参数:一个降维的问题
后续再学习

 浙公网安备 33010602011771号
浙公网安备 33010602011771号