HARDWAR FOR ML- LECTURE 6 DATAFLOW
Review
Deep neural networks typically have a sequence of convolutional,fully-connected, pooling, batch normalization, and activation layers.
Convolution is one of the fundamental kernel in DNNs.
- 2-D convolution
- Stride and padding
- 3-D convolution with input/output channels·Batch size
Convolution can be calculated in different ways.
- Direct, GEMM, FFT-based, Winograd-based
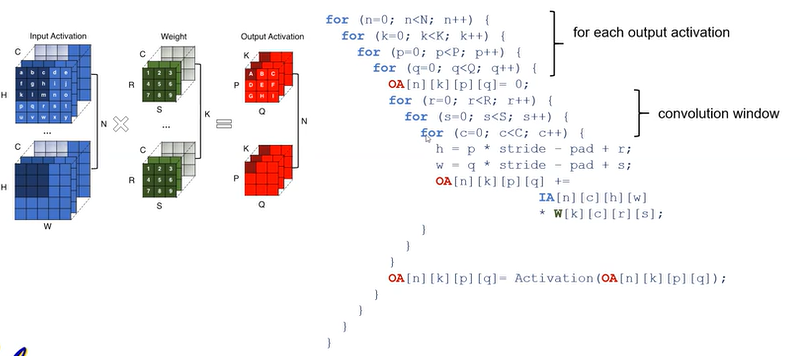
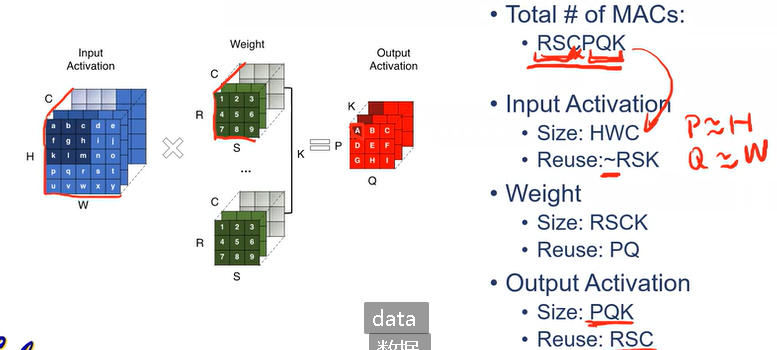
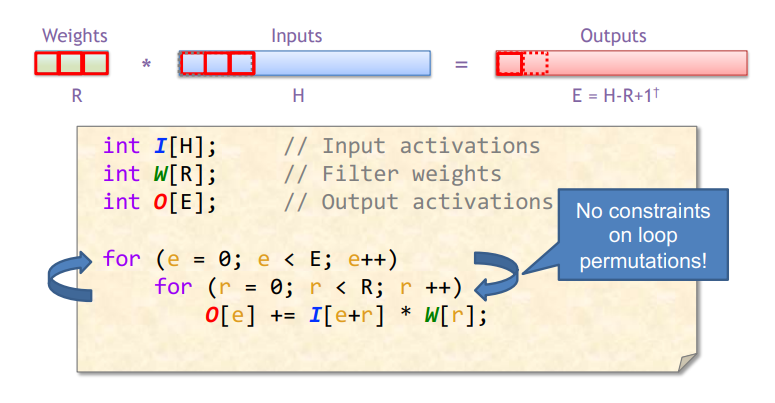
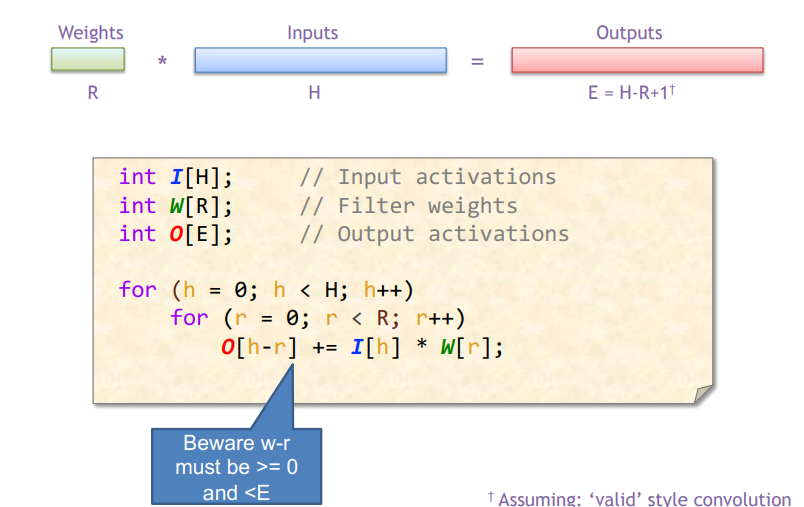
Convolution Loop Nest
Option 1: Direct Convolution
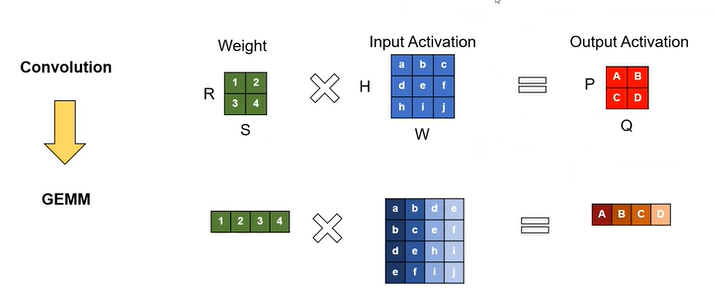
Option 2:GEMM
由于直接卷积的计算效率并不高,Option 2是通过im2col(python存在相应的函数)将卷积运算转换为GEMM。矩阵乘法具有较多的开发经验,直接开发卷积加速软硬件核较为困难。这种方法主要是将卷积窗口对应的局部视野展开为列,将多个卷积窗口内的输入激活展开为多列元素。
主要缺陷:增加了输入激活的memory占用,需要重新组织输入的数据流(元素沿副对角线对称分布)。
通用矩阵乘法的优化可见: https://blog.csdn.net/qq_35985044/article/details/128474264
除了上述方式以外,我们还可以尝试下述这种对角映射方案。以\(H\times W\)的输入图像和尺寸为\(Kh\times Kw\)的卷积核(步长为1,padding为0)为例,输入尺寸为\(H=W=100\),卷积核尺寸为\(Kh=Kw=3\)。
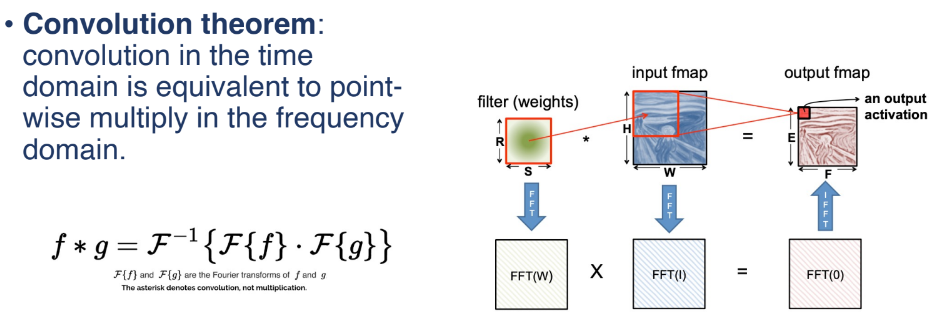
Option 3: FFT-based Convolution
FFT方法是将时域的卷积运算转换为频域的点乘运算,因此需要对权重和输入特征图进行FFT变换得到频域输入和权重,通过乘法得到输出激活的频域表示,最后通过反傅里叶变换恢复输出激活的真实输出。
#!/user/bin/env python3
# -*- coding: utf-8 -*-
from functools import partial
from typing import Iterable, Tuple, Union
import torch
import torch.nn.functional as f
from torch import Tensor, nn
from torch.fft import irfftn, rfftn
from math import ceil, floor
def complex_matmtul(a: Tensor, b: Tensor, groups: int = 1) -> Tensor:
"""
:param a:
:param b:
:param groups: grouped multiplications support multiple sections of channels
:return:
"""
a = a.view(a.size(0), groups, -1, *a.shape[2:])
b = b.view(groups, -1, *b.shape[1:])
a = torch.movedim(a, 2, a.dim() - 1).unsqueeze(-2)
b = torch.movedim(b, (1, 2), (b.dim() - 1, b.dim() - 2))
real = a.real @ b.real - a.imag @ b.imag
imag = a.imag @ b.real + a.imag @ b.imag
real = torch.movedim(real, real.dim() - 1, 2).squeeze(-1)
imag = torch.movedim(imag, imag.dim() - 1, 2).squeeze(-1)
c = torch.zeros(real.shape, dtype=torch.complex64, device=a.device)
c.real, c.imag = real, imag
return c.view(c.size(0), -1, *c.shape[3:])
def to_ntuple(val: Union[int, Iterable[int]], n: int) -> Tuple[int, ...]:
"""
:param val:
:param n:
:return:
"""
if isinstance(val, Iterable):
out = tuple(val)
if len(out) == n:
return out
else:
raise ValueError(f"Cannot cast tuple of length {len(out)} to length {n}.")
else:
return n * (val,)
def fft_conv(
signal: Tensor,
kenerl: Tensor,
bias: Tensor,
padding: Union[int, Iterable[int], str] = 0,
padding_mode: str = "constant",
stride: Union[int, Iterable[int]] = 1,
dilation: Union[int, Iterable[int]] = 1,
groups: int = 1
) -> Tensor:
"""
:param signal: Input tensor to be convolved with the kernel
:param kenerl: convolution kernel
:param bias: bias tensor to add to the output
:param padding: If int, number of zero samples to pad input on the last dimension; If str "same", pad input for size preservation
:param padding_mode: padding_mode: use {constant, reflection, replication}
:param stride: (Union[int, Iterable[int]]) Stride size for computing output values
:param dilation: (Union[int, Iterable[int]]) Dilation rate for the kernel
:param groups: Number of groups for the convolution
:return:
"""
# Cast padding, stride & dilation tu tuples
n = signal.dim - 2
stride_ = to_ntuple(stride, n=n)
dilation_ = to_ntuple(dilation, n=n)
if isinstance(padding, str):
if padding == 'same':
if stride != 1 or dilation != 1:
raise ValueError("stride must be 1 for padding = 'same'.")
padding_ = [(k - 1) / 2 for k in kenerl.shape[2:]]
else:
raise ValueError(f"Padding mode {padding} not supported")
else:
padding_ = to_ntuple(padding, n=n)
# internal dilation offsets
offset = torch.zeros(1, 1, *dilation_, device=signal.device, dtype=signal.dtype)
offset[(slice(None), slice(None), *((0,) * n))] = 1.0
# correct the kernel by cutting off unwanted dilation trailing zeros
cutoff = tuple(slice(None, -d + 1 if d != 1 else None) for d in dilation_) # create tuple
# pad the kernel internally according to the dilation parameters
kernel = torch.kron(kenerl, offset)[(slice(None), slice(None)) + cutoff] # after dilation
# Pad the input signal & kernel tensors (round to support even sized convolutions)
signal_padding = [r(p) for p in padding_[::-1] for r in (floor, ceil)]
signal = f.pad(signal, signal_padding, mode=padding_mode)
signal_size = signal.size() # original signal size without padding to even
if signal.size(-1) % 2 != 0:
signal = f.pad(signal, [0, 1])
kernel_padding = [
pad for i in reversed(range(2, signal.ndim)) for pad in [0, signal.size(i) - kernel.size(i)]
] # (H - Kh) * (W - Kw)
padded_kernel = f.pad(kernel, kernel_padding) # input_channels * output_channels * H * W
# Perform Fourier convolution FFT matrix multiply IFFT
signal_fr = rfftn(signal.float(), dim=tuple(range(2, signal.ndim)))
kernel_fr = rfftn(padded_kernel.float(), dim=tuple(range(2, signal.ndim)))
kernel_fr.imag *= -1
output_fr = complex_matmtul(signal_fr, kernel_fr, groups=groups)
output = irfftn(output_fr, dim=tuple(range(2, signal.ndim)))
# Remove extra padded values
crop_slices = [slice(None), slice(None)] + [
slice(0, (signal_size[i] - kernel.size(i) + 1), stride_[i - 2])
for i in range(2, signal.ndim)
]
output = output[crop_slices].contiguous()
if bias is not None:
bias_shape = tuple([1, -1] + (signal.ndim - 2) * [1]) # 1 * -1 * 1 * 1
output += bias.view(bias_shape)
return output
class _FFTConv(nn.Module):
def __init__(self,
in_channels: int,
out_channels: int,
kernel_size: Union[int, Iterable[int]],
padding: Union[int, Iterable[int]] = 0,
padding_mode: str="constant",
stride: Union[int, Iterable[int]] = 1,
dilation: Union[int, Iterable[int]] = 1,
groups: int = 1,
bias: bool = True,
ndim: int = 1):
super().__init__()
self.in_channels = in_channels
self.out_channels = out_channels
self.kernel_size = kernel_size
self.padding = padding
self.padding_mode = padding_mode
self.stride = stride
self.dilation = dilation
self.groups = groups
self.use_bias = bias
if in_channels % groups != 0:
raise ValueError(
"'in_channels' must be divisible by 'groups'."
f"Found: in_channels={in_channels}, groups={groups}."
)
if out_channels % groups != 0:
raise ValueError(
"'out_channels' must be divisible by 'groups'."
f"Found: out_channels={out_channels}, groups={groups}."
)
kernel_size = to_ntuple(kernel_size, ndim)
weight = torch.randn(out_channels, in_channels // groups, *kernel_size)
self.weight = nn.Parameter(weight)
self.bias = nn.Parameter(torch.randn(out_channels)) if bias else None
def forward(self, signal):
return fft_conv(
signal,
self.weight,
bias=self.bias,
padding=self.padding,
padding_mode=self.padding_mode,
stride=self.stride,
dilation=self.dilation,
groups=self.groups,
)
FFTConv1d = partial(_FFTConv, ndim=1)
FFTConv2d = partial(_FFTConv, ndim=2)
FFTConv3d = partial(_FFTConv, ndim=3)
下面给出测试代码:
import torch
from fft_conv import fft_conv, FFTConv1d
signal = torch.randn(3, 3, 1024) # data shape: (batch, channels, length)
kernel = torch.randn(2, 3, 128) # kernel shape: (out_channels, in_channels, kernel_size)
bias = torch.randn(2)
out = fft_conv(signal, kernel, bias=bias)
fft_conv = FFTConv1d(3, 2, 128, bias=True)
fft_conv.weight = torch.nn.Parameter(kernel)
fft_conv.bias = torch.nn.Parameter(bias)
out = fft_conv(signal)
print(f"Output shape: {out.shape}")
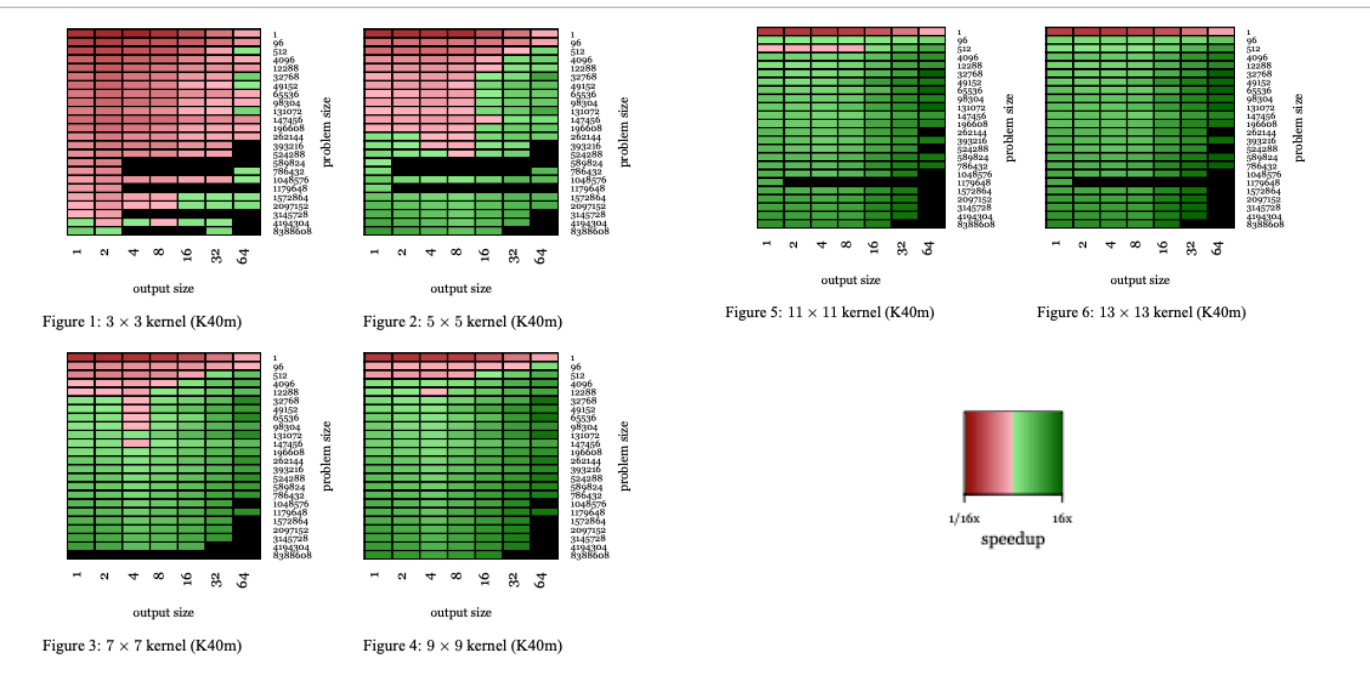
可以注意到的是,在卷积核计算中FFT-based方法比Direct convolution更具有speedup优势。
Option 4: Winograd Transform
以下图中的一维卷积为例,一般矩阵乘法需要进行6次乘法和4次加法。
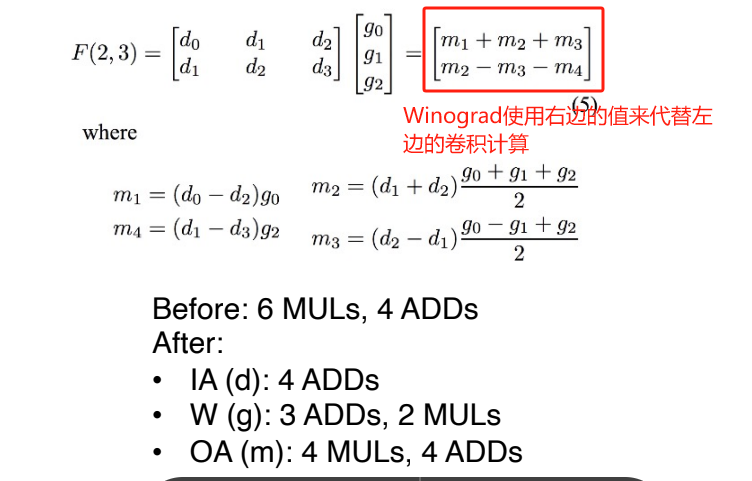
卷积运算中输入信号转换成的矩阵不是任意矩阵,其中有规律地分布大量元素,第一行和第二行中的\(d_1\)和\(d_2\),卷积转换成的矩阵乘法比一般矩阵乘法的问题域更小。
Winograd引入\(m_1\sim m_4\)来参与计算,计算\(r_0=m_1+mm_2+m_3,r_1=m_2-m_3-m_4\)需要在输入信号\(d\)上消耗4次加法(减法),输出\(m\)上需要消耗4次乘法和4次加法。
由于神经网络推理时,卷积核元素是固定的,因此\(g\)上的运算可以提前算好,预测阶段只需要计算一次,可以忽略\(g\)的计算(三次加法,\(g_0+g_2\)为1次,\(g_0+g_2-g_1\)和\(g_0+g_2+g_1\)为1次),总共需要的运算次数为4次乘法和8次加法。计算机中,乘法比加法慢,减少乘法次数,增加少量加法可以实现加速。
我们可以将Winograd过程表述为下述矩阵形式(\(G,B^T\)为对\(g\)和\(d\)的变换算子),具体包括输入变换、卷积核变换、哈达马积、输出变换:
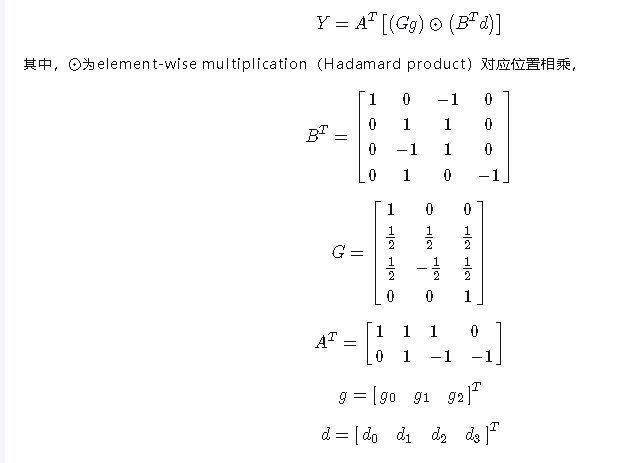
如何将Winograd推广到二维?可以使用\(Y=A^T[[GgG^T]\odot [B^TdB]] A\),\(g\)为\(r\times r\)卷积核,\(d\)为\((m+r-1)\times (m+r-1)\)的image tiles.
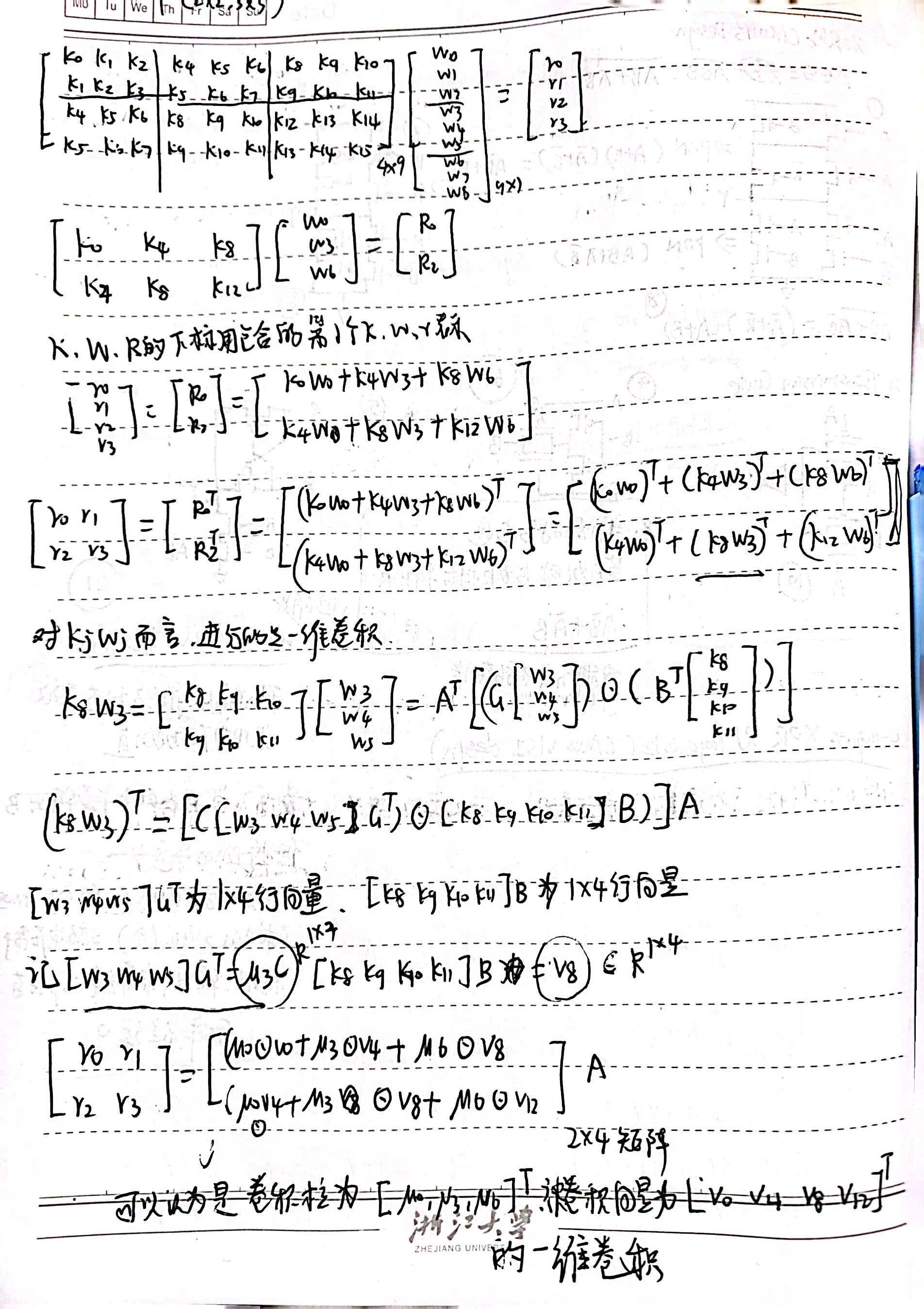
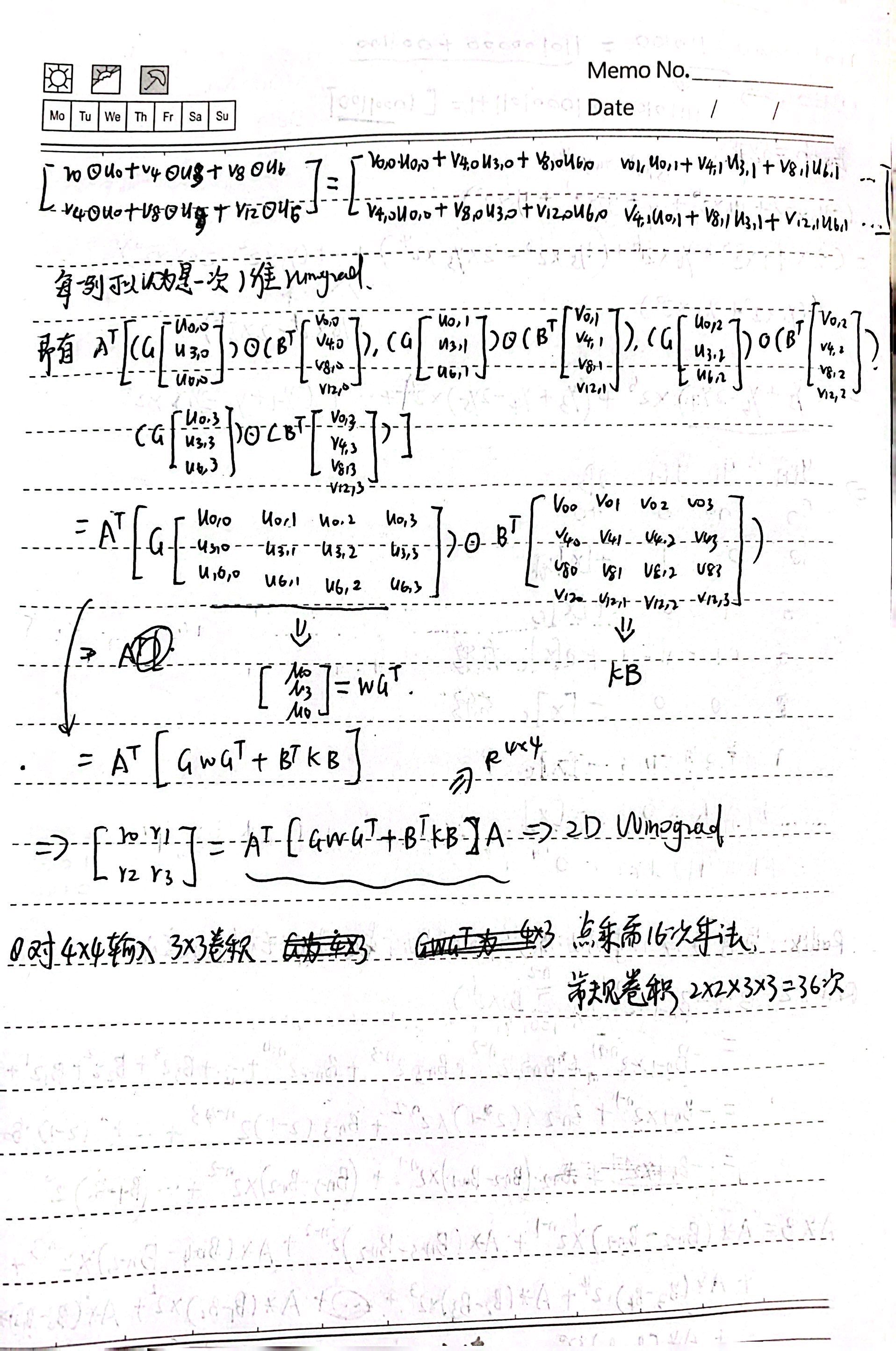
对于1维卷积\(F(m,r)\)的Winograd算法,其需要的乘法个数为\(m+r−1\)。对于2维卷积\(F(m\times n,r\times s)\)的Winograd算法,其需要的乘法个数为\((m+r-1)\times(n+s-1)\)。当n = m n=mn=m以及\(s=r\)时,卷积\(F(m\times m,r\times r)\)的Winograd算法需要的乘法个数为\((m+r-1)\times(m+r-1)\)。推导手稿可见下面
其他信息补充
Dilation
在卷积神经网络(CNN)中,膨胀(dilation)是一种用于增加卷积操作感受野的技术。通常情况下,卷积操作在输入张量上以固定的步幅滑动,以便从每个位置提取信息。然而,通过引入膨胀参数,可以使卷积核在输入张量上以更大的步幅滑动,从而扩大其感受野。
具体来说,膨胀操作会在卷积核中的元素之间插入额外的零值,这样就扩大了卷积核的有效大小,使其在输入张量上的感受野变大。这样做的一个重要优点是,在不增加卷积核大小的情况下,可以增加网络的感受野,从而更好地捕捉输入数据的长程依赖关系和上下文信息。
膨胀在卷积神经网络中的应用有以下几个方面的作用:
增大感受野:通过增加卷积核的有效大小,可以在不增加参数数量的情况下扩大网络的感受野,使网络能够更好地理解输入数据的整体结构和上下文信息。
减少参数数量:相比于传统的卷积操作,膨胀卷积可以在不增加参数数量的情况下增大感受野,因为它只是通过插入零值来改变卷积核的行为,而不是增加额外的权重参数。
提高计算效率:由于膨胀卷积可以在更大的步幅下滑动,因此可以在一定程度上减少计算量,提高模型的计算效率。
总的来说,膨胀在卷积神经网络中被用来扩大网络的感受野,从而增强网络对输入数据的理解能力,同时又不增加太多的参数数量和计算成本。
Dataflow Taxonomy
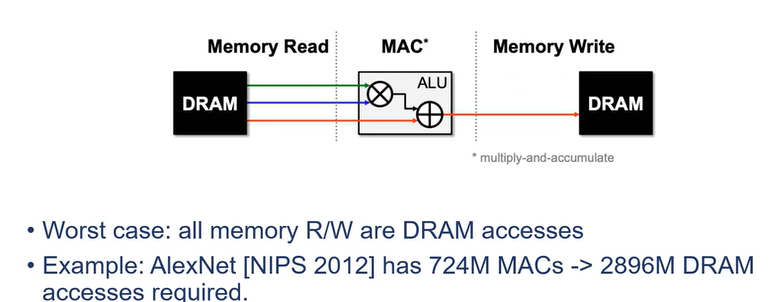
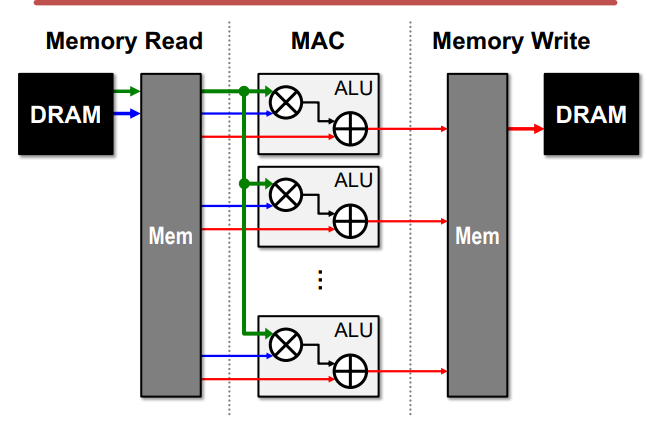
Locality主要反映在内存访存模式和时空数据重用。
- 内存访存涉及内存memory read,mac和memory write。内存访存次数远大于Mac次数。
- 时空数据重用体现为数据缓存的时分复用或空分复用。
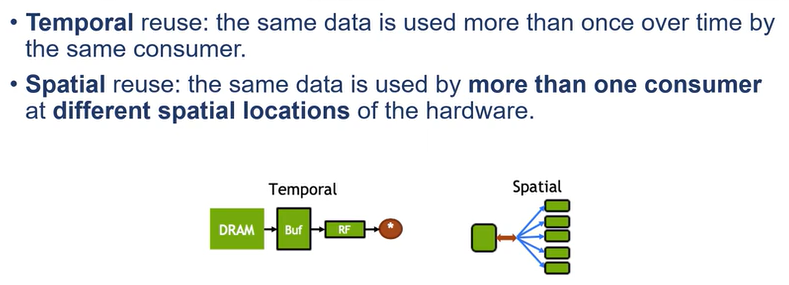
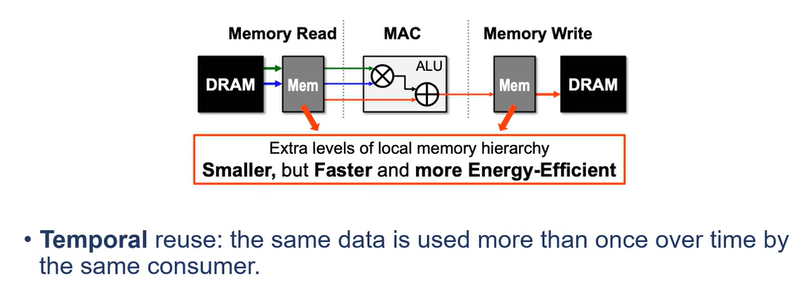
针对temporal和spatial locality的改进方法:
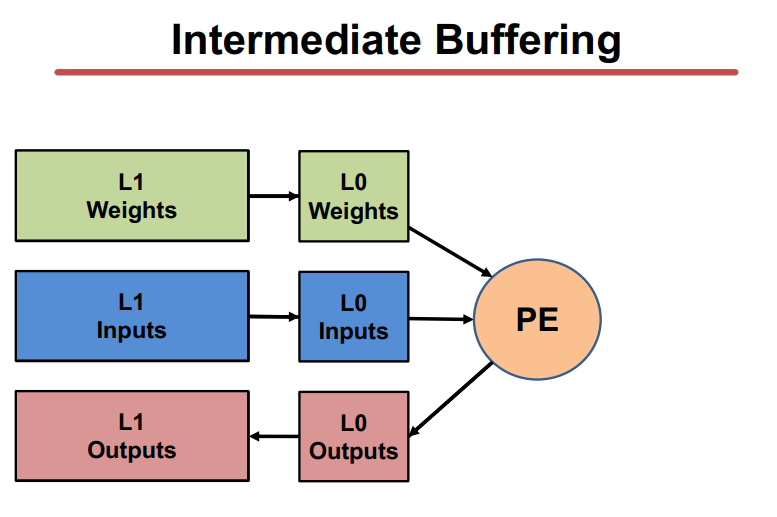
内存时分复用中的改进方法可以建立memory hierarchy,通过在计算单元和DRAM中间引入一个较小的、速度更快的cache来实现数据的缓冲,便于DNNs计算中的数据重用。
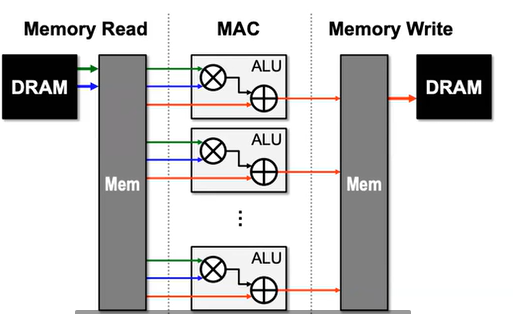
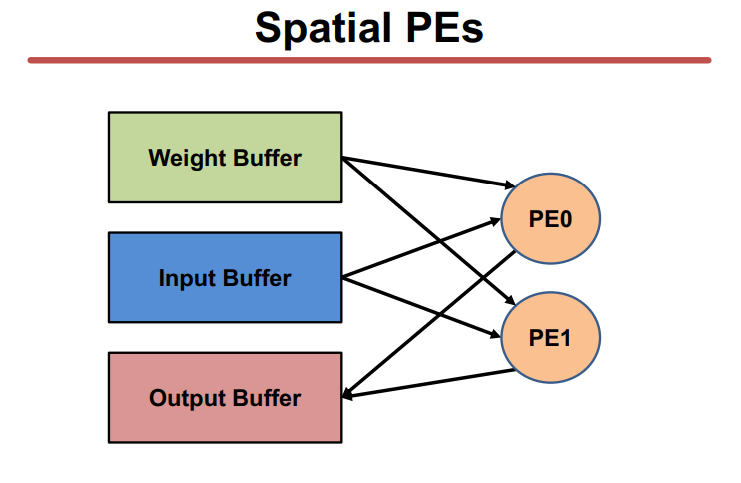
空分复用的典型方法是建立并行的计算单元来提高吞吐量。【the same data is used by more than one consumer at different spatial locations of the hardware.】
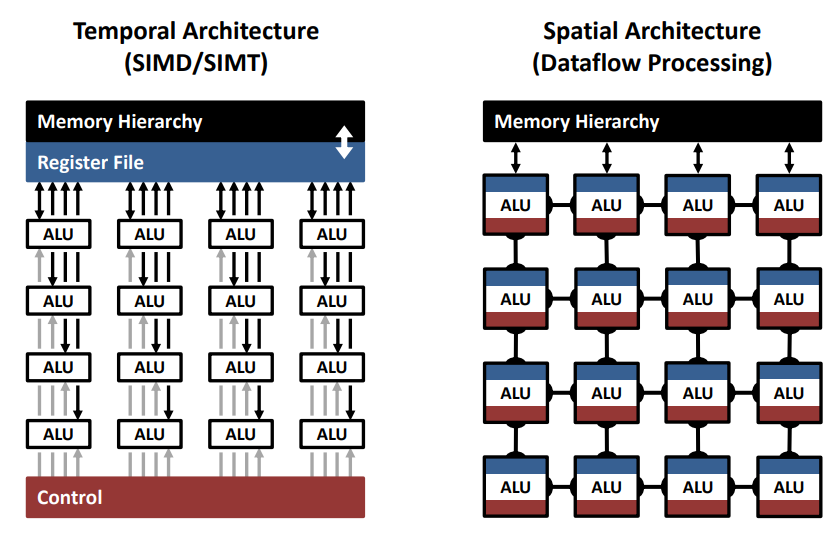
Locality and Parallisim是提高性能的主要方法。
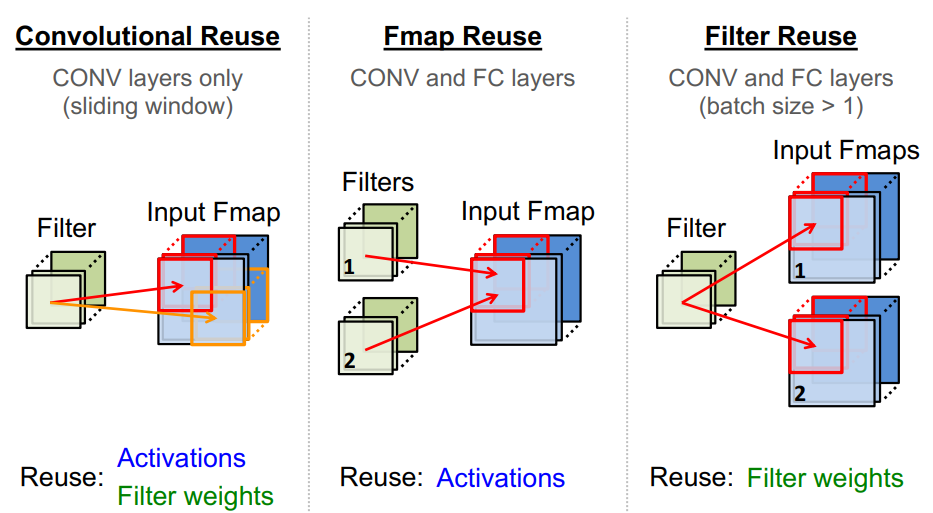
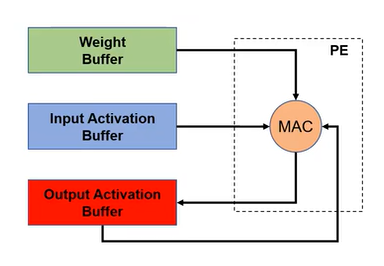
Data Reuse in DNN
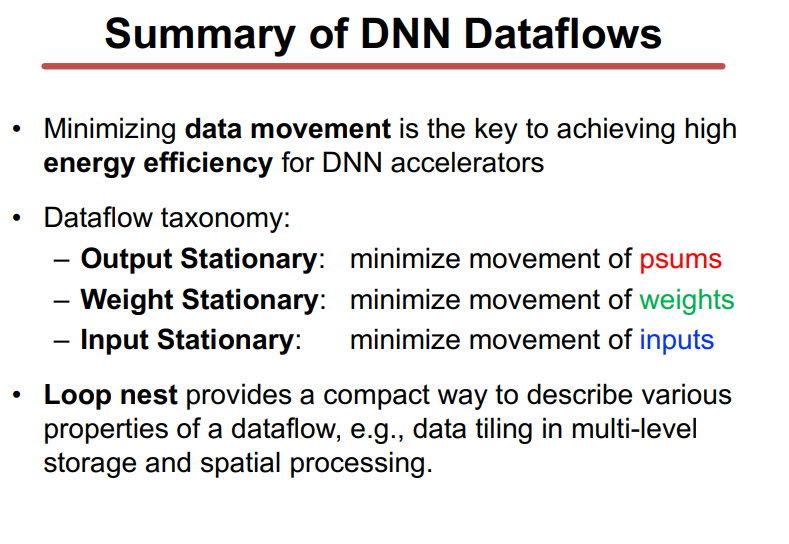
Dataflow: 决定硬件中DNN操作的执行顺序,包括计算顺序或数据移动顺序。
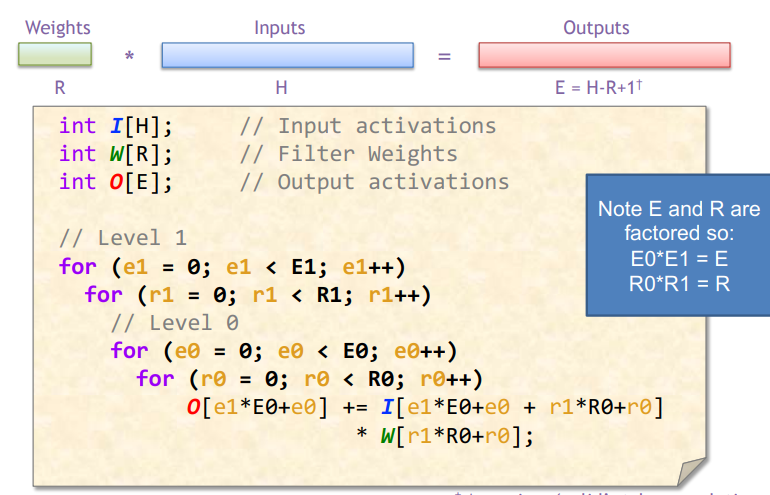
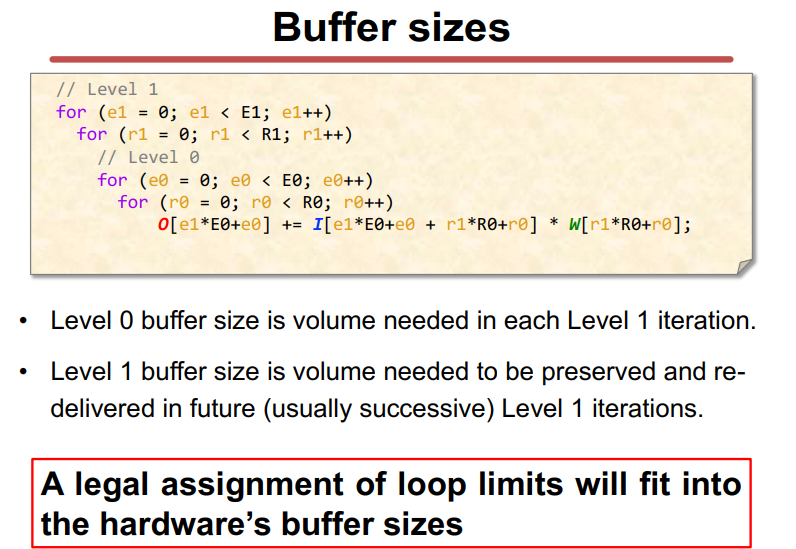
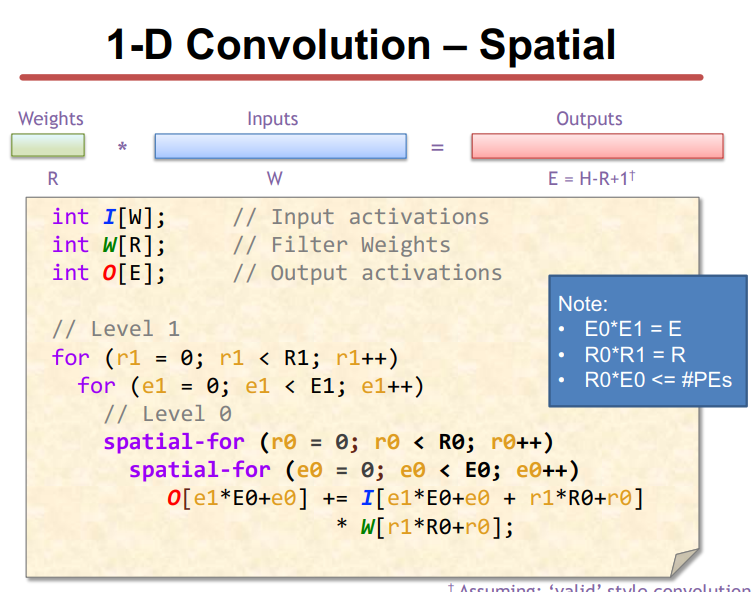
Loop nest:一种紧凑的方式来描述执行顺序(这里讨论的不是严格的体系结构中数据分布概念)。例如,dataflow (for表示temporal,描述时序执行顺序;spatial_for用于描述并行顺序)。
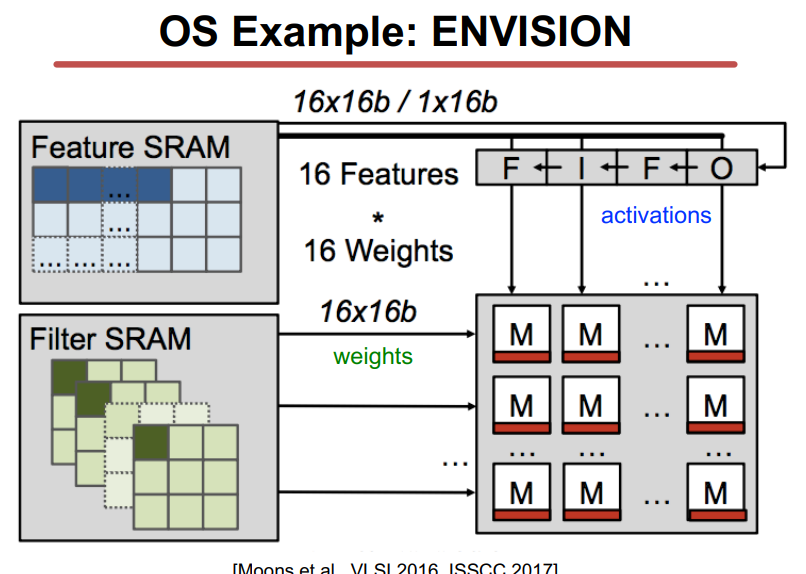
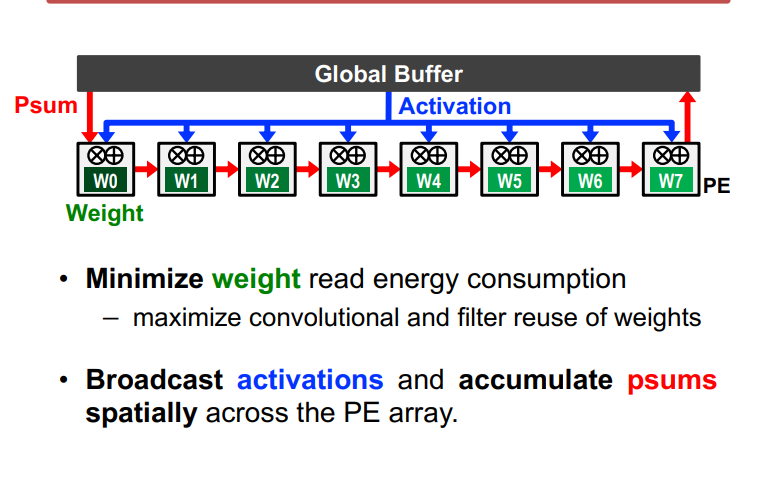
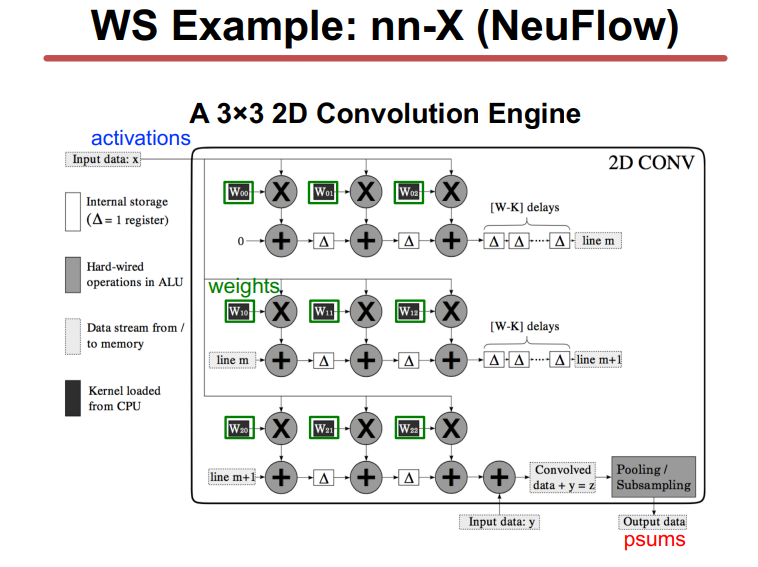
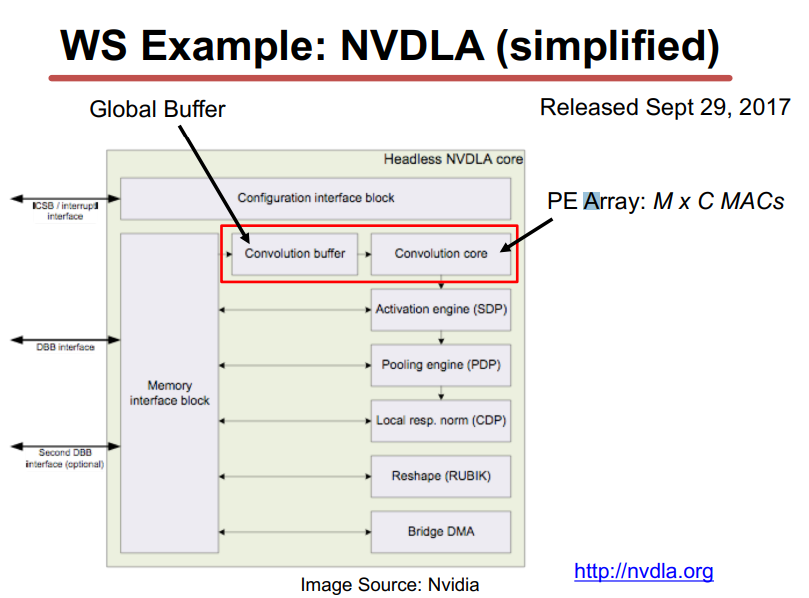
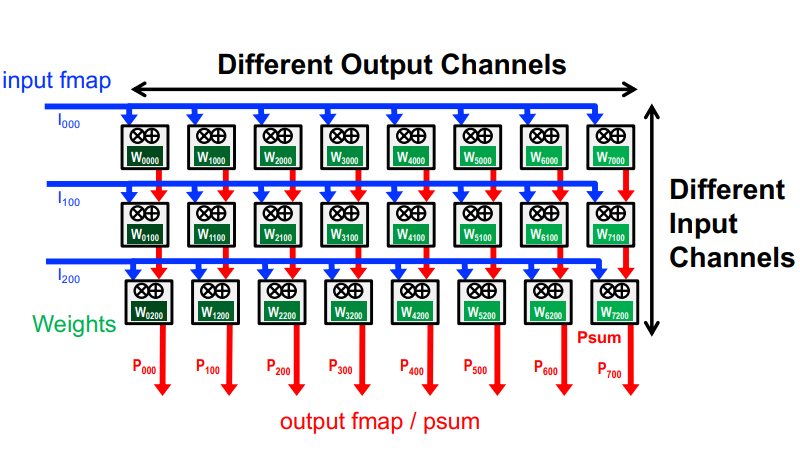
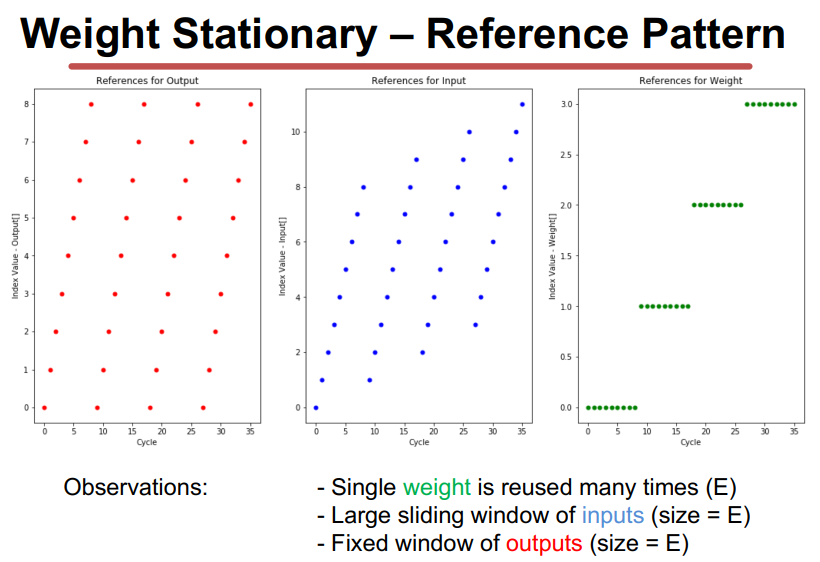
Output-Stationary and Weight-Stationart
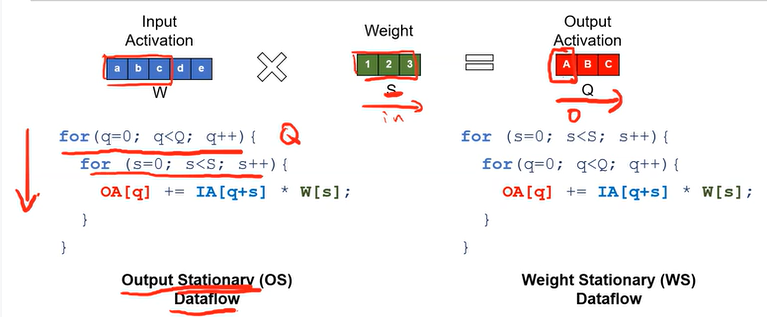
WS和OS取决于loop nest的最内层循环,其中不变的量为静止对象,输出激活是保持不变的。
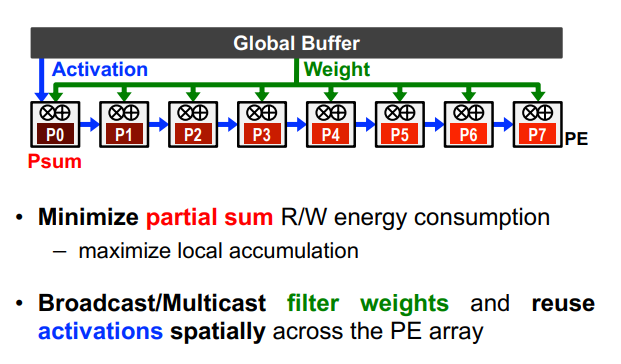
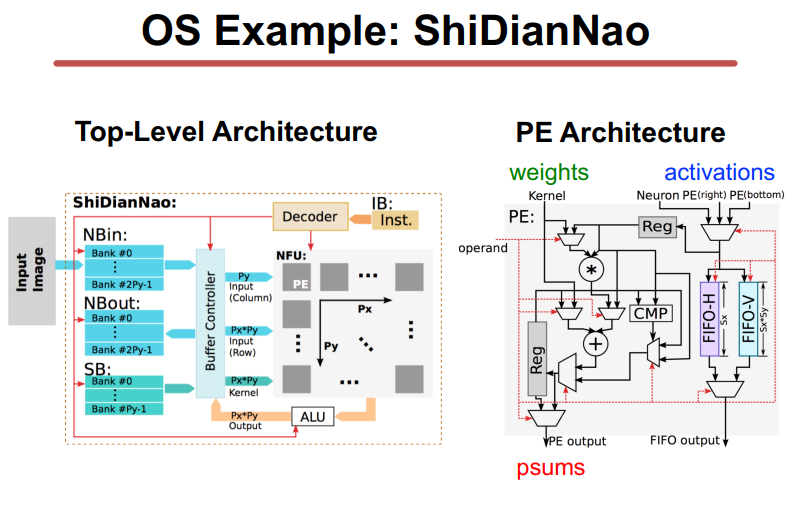
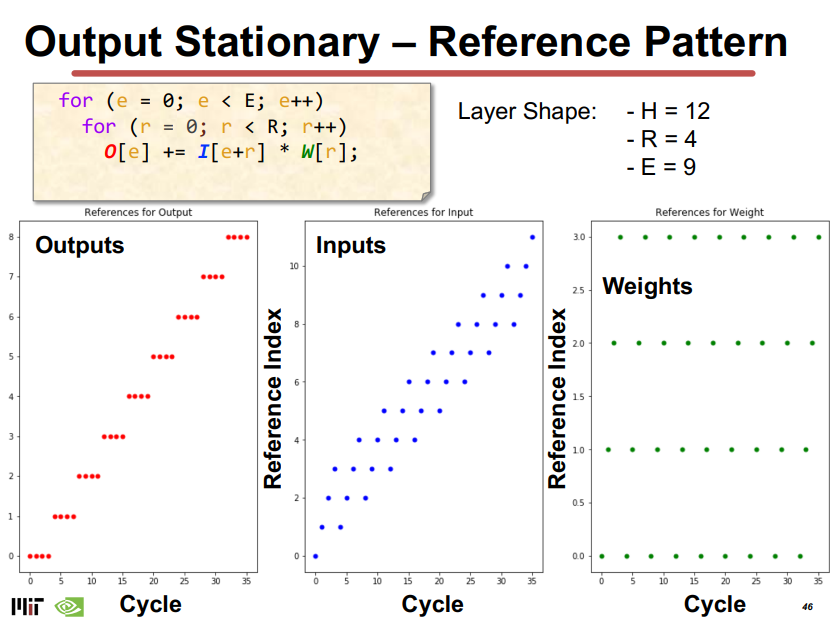
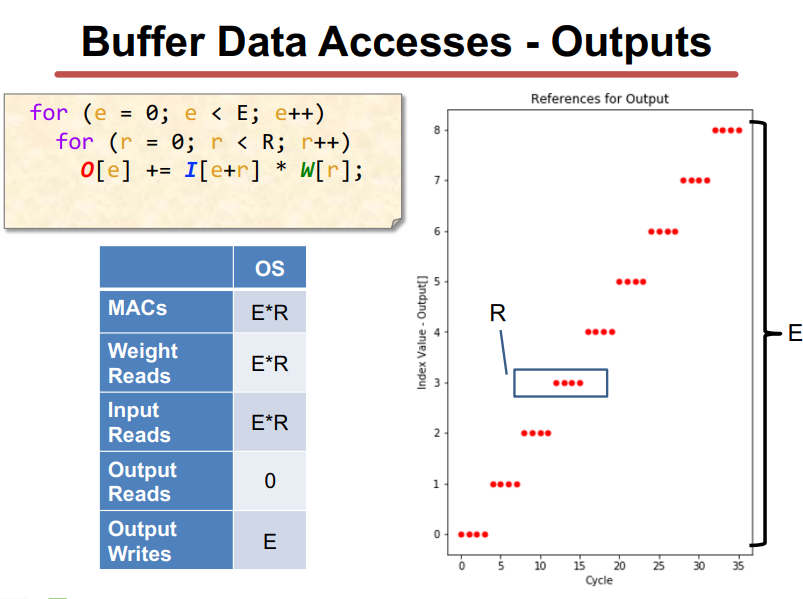
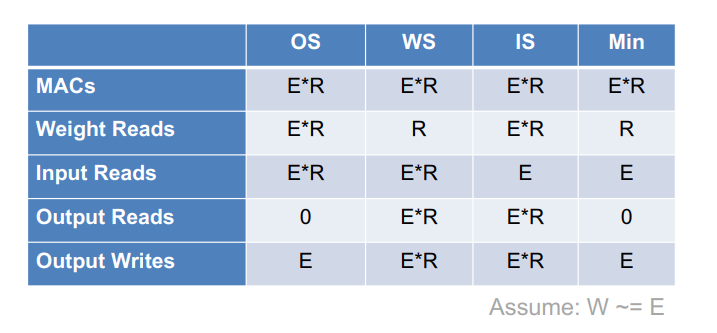
OS
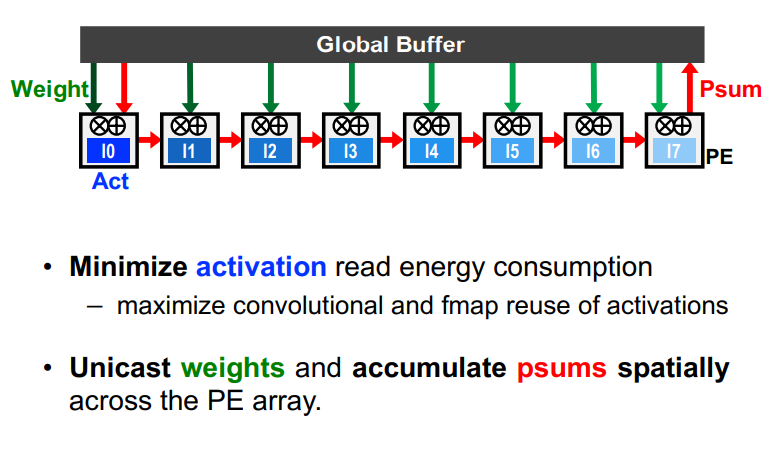
WS
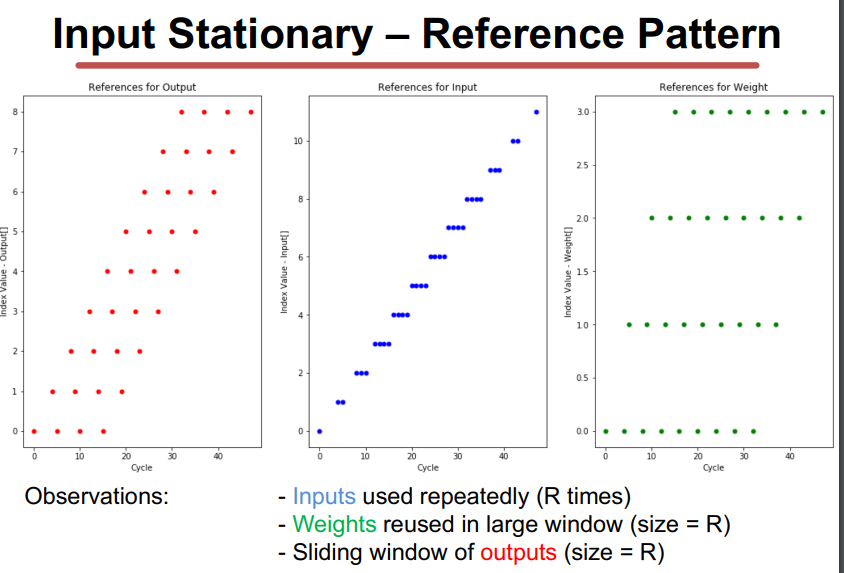
IS
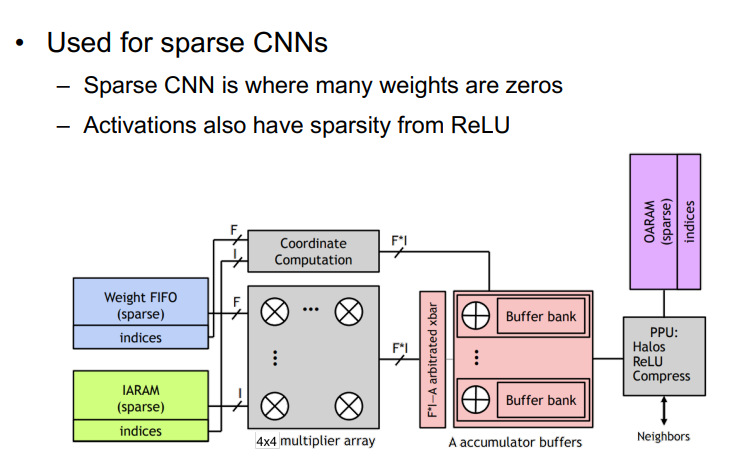
其他方法
Summary
参考链接
https://www.cnblogs.com/shine-lee/p/10906535.html
https://eyeriss.mit.edu/tutorial.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号