DirectX11 With Windows SDK--07 添加光照与常用几何模型、光栅化状态
前言
这一章项目涉及到的内容非常多,在学习之前你还需要了解下面内容:
| 章节内容 |
|---|
| 深入理解HLSL常量缓冲区打包规则 |
学习目标:
- 熟悉基本的Phong光照模型
- 掌握常量缓冲区打包规则
- 熟悉几何模型的顶点位置、法向量计算,能够使用
Geometry库,实现原理可以留到看完纹理映射和法线贴图再回头看 - 熟悉光栅化状态
DirectX11 With Windows SDK完整目录
欢迎加入QQ群: 727623616 可以一起探讨DX11,以及有什么问题也可以在这里汇报。
颜色向量
一个4D的颜色向量,通常情况下会表示为(red, green, blue, alpha),每个分量的取值范围为[0.0f, 1.0f]。对于红绿蓝分量,用0.0f表示该没有该分量的颜色,用1.0f表示该分量的颜色达到饱和;对于alpha分量,用0.0f表示该分量完全透明,用1.0f表示该分量完全不透明。
对于8位色来说,每种分量的颜色亮度可以表达出256种,但使用浮点数会大大浪费存储空间。在内存要求苛刻的情况下,我们可以使用32位的数据类型,其中rgba各占8位,若需要映射到浮点数向量,则对应关系为f(x) = x / 255.0f,其中x为整数存储法,表示范围为[0,255],f(x)为浮点存储法,表示范围为[0.0f, 1.0f]。
在头文件DirectXColors.h中,我们可以看到定义了一些4D的颜色向量,位于名称空间DirectX::Colors。这里就不贴出来了。
如果颜色相关的运算在C++代码层进行的话,则在最后需要调用XMVectorSaturate函数确保各个分量都控制在[0.0f, 1.0f]之间。
法向量
法向量用于表述物体表面的朝向,它是单位向量,并且垂直于该表面。对于曲面上一点,通常描述的是曲面该点的切面所对应的法向量。在光照的计算中会经常用到该向量。但是我们传入的通常是顶点数据而不是面的数据,因此顶点结构体内还会包含法向量数据:
struct VertexPosNormalColor
{
DirectX::XMFLOAT3 pos;
DirectX::XMFLOAT3 normal;
DirectX::XMFLOAT4 color;
static const D3D11_INPUT_ELEMENT_DESC inputLayout[3];
};
对应的每个输入元素的描述为:
const D3D11_INPUT_ELEMENT_DESC VertexPosNormalColor::inputLayout[3] = {
{ "POSITION", 0, DXGI_FORMAT_R32G32B32_FLOAT, 0, 0, D3D11_INPUT_PER_VERTEX_DATA, 0 },
{ "NORMAL", 0, DXGI_FORMAT_R32G32B32_FLOAT, 0, 12, D3D11_INPUT_PER_VERTEX_DATA, 0},
{ "COLOR", 0, DXGI_FORMAT_R32G32B32A32_FLOAT, 0, 24, D3D11_INPUT_PER_VERTEX_DATA, 0}
};
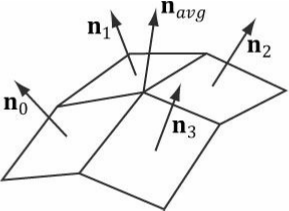
对于棱角分明的物体,如立方体,一共由12个三角形组成,2个三角形的4个顶点构成一个面。由于该面的4个顶点要求法向量朝向一致,而一个顶点虽然与立方体的三个面邻接,但是法向量只有一个,因此需要分化出3个包含不同法向量的顶点。最终用于绘制该立方体的顶点数就需要24个,是立方体顶点数的3倍!
而对于没那么棱角分明的物体,表面只是稍微有些不平坦的话,我们可以求出该点相邻的所有面的平均法向量。
对于可以用函数表示的曲面,如球,则可以求出曲面一点对应切面的法向量。
对于函数:
则对应点切平面的法向量(非单位向量)为:
最后经过标准化后即为曲面该点对应的单位法向量。如球面方程:
最终对应的单位法向量为:
法向量的变换
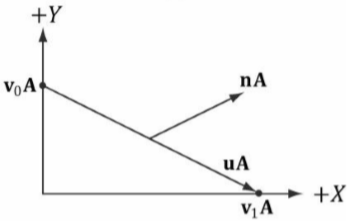
这里省略变换的证明,若一个物体的向量u与法向量n正交,当向量u经过了矩阵A变换得到了\(\mathbf{u'}=\mathbf{u}\mathbf{A}\)时,对应变换后的法向量应为\(\mathbf{n'}=\mathbf{n}(\mathbf{A^{-1}})^{\mathbf{T}}\)
若物体表面一点处的切线向量u已经与法向量n正交(左图),在经过变换矩阵A变换后,nA的变换并不是我们想要的结果,也导致uA和nA向量有可能不再正交(右图):
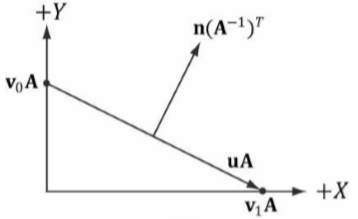
现在我们需要找到正确的变换,让法向量能够与变换后的切线向量nA正交。下面是推导过程:
因此\((\mathbf{A^{-1}})^T\)(A的求逆再转置)可以让法向量变换后与切线向量正交了。
物体材质
光在照射到物体上时,由于物体的材质特性会反射一部分光到人眼,最终我们观察到的物体颜色就是被反射的那部分光的颜色。不同的物体有不同的材质属性,决定了各种颜色分量的反射系数是多少。其中红绿蓝每个分量的取值范围为[0.0f, 1.0f]。
在C++中的结构体表示为:
// 物体表面材质
// 物体表面材质
struct Material
{
DirectX::XMFLOAT4 ambient;
DirectX::XMFLOAT4 diffuse;
DirectX::XMFLOAT4 specular; // w = 镜面反射强度
DirectX::XMFLOAT4 reflect;
};
在HLSL中则表示为:
// 物体表面材质
struct Material
{
float4 Ambient;
float4 Diffuse;
float4 Specular; // w = SpecPower
float4 Reflect;
};
光的种类
环境光(Ambient Lighting)
环境光也可以说是间接光照,即光线经过了多次反射后最终被我们的人眼所见。即便在一个密闭的暗室使用手电筒照射,你还是可以感受到光充满了整个房间。同样,在阳光照射下,阴影部分也并不是纯粹的黑色,只是比其他地方暗上许多而已。因此在设置环境光的时候,可以考虑以你想呈现的阴影部分亮度进行设置。
在HLSL中,若环境光颜色向量为la ,物体材质对环境光的反射颜色向量为ma,最终环境光分量呈现的颜色为:
这里的乘号表示各个分量相乘,最终得到的颜色向量为
(la.r * ma.r, la.g * ma.g, la.b * ma.b, la.a * ma.a)
漫反射光(Diffuse Lighting)
在现实生活中,我们看到的光以漫反射光为主。对于粗糙的表面,光照射在物体表面一点后反射的方向是不确定的。我们可以近似认为光线在照射到物体表面一点后会朝任意方向反射等量的光照,这样我们人眼无论在哪个方向观察该点,呈现的亮度应该是不会变化的(在没有镜面反射的基础)。但是物体的亮度与光线照射的方向有所关系,比如当均匀光线垂直照射物体的时候,此时看到的物体表面是最亮的;而均匀光线不经过物体表面,与表面平行的时候,物体的表面此时几乎是看不到的(此时可能仍有少量的光会到达物体表面,取决于光束的汇聚程度和与物体的距离)。毕竟光束不可能做到完全同一个方向照射,仍会有少数的散射光。
朗伯余弦定理
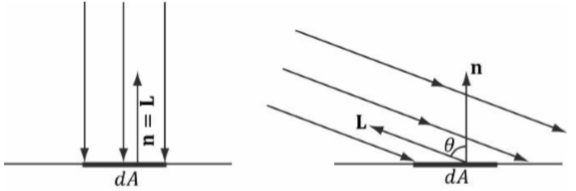
既然被照射一点处的亮度kd与光照方向有关系,我们可以使用朗伯余弦定理来表示这种现象,用L表示从被照射点向光源的方向向量,n表示平面单位法向量,则有:
若漫反射光颜色向量为ld,物体材质对漫反射光的反射颜色向量为md,最终漫反射光分量呈现的颜色为:
镜面反射光(Specular Lighting)
某些较为光滑的平面可以均匀地反射光照。镜面反射光的强度与人眼所在位置有联系,若人站在反射光的路径上看反射点,可以看到此时的点是最亮的,然后随着人眼远离反射光线的路径,看到的镜面反射光会越来越少,直至只能看到漫反射光和环境光的部分。
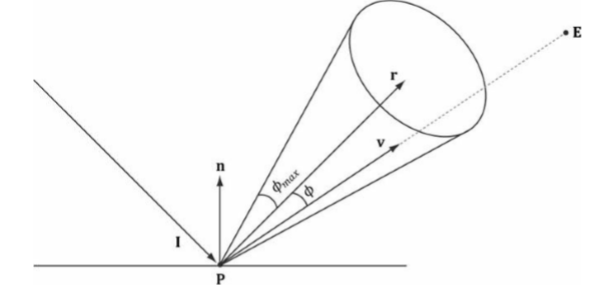
在HLSL中,若L表示从被照射点向光源的方向向量,R为光反射后的单位方向向量,toEye为物体表面一点到人眼的单位方向向量,p为镜面系数(系数越大,表面越光滑,而且p的值必须大于等于1,否则会有很奇怪的效果),可以用下面的公式来表达亮度ks:
这里的L和n向量点乘判定和上面一样,即如果点乘小于等于0,意味着漫反射光和镜面光都不会出现。
若镜面反射光颜色向量为ls,物体材质对镜面光的反射颜色向量为ms,最终镜面反射光分量呈现的颜色为:
光照模型
平行光/方向光
平行光通常是一种全局光,它有一个固定的照射方向。
经平行光照射下物体表面一点的颜色可以初步表示为:
其中
在C++中,方向光的结构体表示为:
struct DirectionalLight
{
DirectX::XMFLOAT4 ambient;
DirectX::XMFLOAT4 diffuse;
DirectX::XMFLOAT4 specular;
DirectX::XMFLOAT3 direction;
float pad; // 最后用一个浮点数填充使得该结构体大小满足16的倍数,便于我们以后在HLSL设置数组
};
在HLSL则表示为:
struct DirectionalLight
{
float4 Ambient;
float4 Diffuse;
float4 Specular;
float3 Direction;
float Pad;
};
在HLSL中计算平行光/方向光的函数如下(光向量是与光照射方向相反的单位向量):
void ComputeDirectionalLight(Material mat, DirectionalLight L,
float3 normal, float3 toEye,
out float4 ambient,
out float4 diffuse,
out float4 spec)
{
// 初始化输出
ambient = float4(0.0f, 0.0f, 0.0f, 0.0f);
diffuse = float4(0.0f, 0.0f, 0.0f, 0.0f);
spec = float4(0.0f, 0.0f, 0.0f, 0.0f);
// 光向量与照射方向相反
float3 lightVec = -L.Direction;
// 添加环境光
ambient = mat.Ambient * L.Ambient;
// 添加漫反射光和镜面光
float diffuseFactor = dot(lightVec, normal);
// 展开,避免动态分支
[flatten]
if (diffuseFactor > 0.0f)
{
float3 v = reflect(-lightVec, normal);
float specFactor = pow(max(dot(v, toEye), 0.0f), mat.Specular.w);
diffuse = diffuseFactor * mat.Diffuse * L.Diffuse;
spec = specFactor * mat.Specular * L.Specular;
}
}
注意该函数的normal和toEye向量都为单位向量,除此之外输出了光的三种分量。
点光
点光是一种有源光照模型,确定光源位置后,它会朝所有方向辐射光照。
在HLSL,若已知光源位置向量Q和照射点P,则单位光向量为:
(Q - P) / length(Q - P)
光的衰弱
随着距离的增长,光源照射到物体表面更远一点时呈现的亮度更低。其中光的衰弱只对直接光照有效,对间接光(如环境光分量)没有影响。
若d为光源到物体一点的距离,则有:
若灯光距离物体太远,计算到的衰弱因子接近于0.我们可以使用标量range来控制照射范围,对距离过大的物体提前避免了漫射光和镜面光的计算。
则经点光照射下物体表面一点的亮度可以初步表示为:
在C++中,点光可以被表示为:
// 点光
struct PointLight
{
PointLight() { memset(this, 0, sizeof(PointLight)); }
DirectX::XMFLOAT4 ambient;
DirectX::XMFLOAT4 diffuse;
DirectX::XMFLOAT4 specular;
// 打包成4D向量: (position, range)
DirectX::XMFLOAT3 position;
float range;
// 打包成4D向量: (A0, A1, A2, pad)
DirectX::XMFLOAT3 att;
float pad; // 最后用一个浮点数填充使得该结构体大小满足16的倍数,便于我们以后在HLSL设置数组
};
在HLSL则表示为:
// 点光
struct PointLight
{
float4 Ambient;
float4 Diffuse;
float4 Specular;
float3 Position;
float Range;
float3 Att;
float Pad;
};
在HLSL中计算点光的函数如下
void ComputePointLight(Material mat, PointLight L, float3 pos, float3 normal, float3 toEye,
out float4 ambient, out float4 diffuse, out float4 spec)
{
// 初始化输出
ambient = float4(0.0f, 0.0f, 0.0f, 0.0f);
diffuse = float4(0.0f, 0.0f, 0.0f, 0.0f);
spec = float4(0.0f, 0.0f, 0.0f, 0.0f);
// 从表面到光源的向量
float3 lightVec = L.Position - pos;
// 表面到光线的距离
float d = length(lightVec);
// 灯光范围测试
if (d > L.Range)
return;
// 标准化光向量
lightVec /= d;
// 环境光计算
ambient = mat.Ambient * L.Ambient;
// 漫反射和镜面计算
float diffuseFactor = dot(lightVec, normal);
// 展开以避免动态分支
[flatten]
if (diffuseFactor > 0.0f)
{
float3 v = reflect(-lightVec, normal);
float specFactor = pow(max(dot(v, toEye), 0.0f), mat.Specular.w);
diffuse = diffuseFactor * mat.Diffuse * L.Diffuse;
spec = specFactor * mat.Specular * L.Specular;
}
// 光的衰弱
float att = 1.0f / dot(L.Att, float3(1.0f, d, d * d));
diffuse *= att;
spec *= att;
}
聚光灯
聚光灯也是一种有源光照模型,在确定光源位置后,其照射区域可以看作一个锥体,在同等照射距离下,越靠近照射中心,亮度越强。同样随着距离的增大,光照强度逐渐减弱。
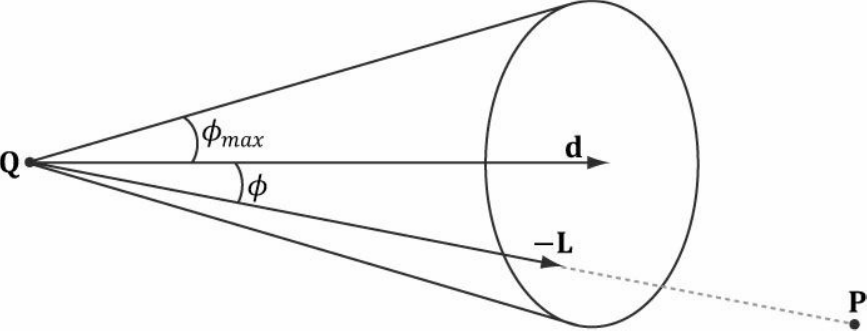
在HLSL,若已知光源位置向量Q和照射点P,则单位光向量为:
(Q - P) / length(Q - P)
若已知光向量L和照射强度d,以及光的汇聚程度spot,则可以得到光照强度因子:
通常spot的值越大,光束的汇聚程度越强。
则经聚光灯照射下物体表面一点的亮度可以初步表示为:
在C++中,聚光灯的结构体如下:
struct SpotLight
{
DirectX::XMFLOAT4 ambient;
DirectX::XMFLOAT4 diffuse;
DirectX::XMFLOAT4 specular;
// 打包成4D向量: (position, range)
DirectX::XMFLOAT3 position;
float range;
// 打包成4D向量: (direction, spot)
DirectX::XMFLOAT3 direction;
float spot;
// 打包成4D向量: (att, pad)
DirectX::XMFLOAT3 att;
float pad; // 最后用一个浮点数填充使得该结构体大小满足16的倍数,便于我们以后在HLSL设置数组
};
在HLSL中,则表示为:
struct SpotLight
{
float4 Ambient;
float4 Diffuse;
float4 Specular;
float3 Position;
float Range;
float3 Direction;
float Spot;
float3 Att;
float Pad;
};
在HLSL中计算聚光灯的函数如下
void ComputeSpotLight(Material mat, SpotLight L, float3 pos, float3 normal, float3 toEye,
out float4 ambient, out float4 diffuse, out float4 spec)
{
// 初始化输出
ambient = float4(0.0f, 0.0f, 0.0f, 0.0f);
diffuse = float4(0.0f, 0.0f, 0.0f, 0.0f);
spec = float4(0.0f, 0.0f, 0.0f, 0.0f);
// // 从表面到光源的向量
float3 lightVec = L.Position - pos;
// 表面到光源的距离
float d = length(lightVec);
// 范围测试
if (d > L.Range)
return;
// 标准化光向量
lightVec /= d;
// 计算环境光部分
ambient = mat.Ambient * L.Ambient;
// 计算漫反射光和镜面反射光部分
float diffuseFactor = dot(lightVec, normal);
// 展开以避免动态分支
[flatten]
if (diffuseFactor > 0.0f)
{
float3 v = reflect(-lightVec, normal);
float specFactor = pow(max(dot(v, toEye), 0.0f), mat.Specular.w);
diffuse = diffuseFactor * mat.Diffuse * L.Diffuse;
spec = specFactor * mat.Specular * L.Specular;
}
// 计算汇聚因子和衰弱系数
float spot = pow(max(dot(-lightVec, L.Direction), 0.0f), L.Spot);
float att = spot / dot(L.Att, float3(1.0f, d, d * d));
ambient *= spot;
diffuse *= att;
spec *= att;
}
HLSL代码
在LightHelper.hlsli标头文件中包含了上述所有的HLSL结构体以及三种光照模型的函数
然后Light_VS.hlsl和Light_PS.hlsl分别存放的是需要用到的顶点着色器和像素着色器
// Light.hlsli
#include "LightHelper.hlsli"
cbuffer VSConstantBuffer : register(b0)
{
matrix g_World;
matrix g_View;
matrix g_Proj;
matrix g_WorldInvTranspose;
}
cbuffer PSConstantBuffer : register(b1)
{
DirectionalLight g_DirLight;
PointLight g_PointLight;
SpotLight g_SpotLight;
Material g_Material;
float3 g_EyePosW;
float g_Pad;
}
struct VertexIn
{
float3 PosL : POSITION;
float3 NormalL : NORMAL;
float4 Color : COLOR;
};
struct VertexOut
{
float4 PosH : SV_POSITION;
float3 PosW : POSITION; // 在世界中的位置
float3 NormalW : NORMAL; // 法向量在世界中的方向
float4 Color : COLOR;
};
// Light_VS.hlsl
#include "Light.hlsli"
// 顶点着色器
VertexOut VS(VertexIn vIn)
{
VertexOut vOut;
matrix viewProj = mul(g_View, g_Proj);
float4 posW = mul(float4(vIn.PosL, 1.0f), g_World);
vOut.PosH = mul(posW, viewProj);
vOut.PosW = posW.xyz;
vOut.NormalW = mul(vIn.NormalL, (float3x3) g_WorldInvTranspose);
vOut.Color = vIn.Color; // 这里alpha通道的值默认为1.0
return vOut;
}
// Light_PS.hlsl
#include "Light.hlsli"
// 像素着色器
float4 PS(VertexOut pIn) : SV_Target
{
// 标准化法向量
pIn.NormalW = normalize(pIn.NormalW);
// 顶点指向眼睛的向量
float3 toEyeW = normalize(g_EyePosW - pIn.PosW);
// 初始化为0
float4 ambient, diffuse, spec;
float4 A, D, S;
ambient = diffuse = spec = A = D = S = float4(0.0f, 0.0f, 0.0f, 0.0f);
ComputeDirectionalLight(g_Material, g_DirLight, pIn.NormalW, toEyeW, A, D, S);
ambient += A;
diffuse += D;
spec += S;
ComputePointLight(g_Material, g_PointLight, pIn.PosW, pIn.NormalW, toEyeW, A, D, S);
ambient += A;
diffuse += D;
spec += S;
ComputeSpotLight(g_Material, g_SpotLight, pIn.PosW, pIn.NormalW, toEyeW, A, D, S);
ambient += A;
diffuse += D;
spec += S;
float4 litColor = pIn.Color * (ambient + diffuse) + spec;
litColor.a = g_Material.Diffuse.a * pIn.Color.a;
return litColor;
}
这里有两个常量缓冲区,一个用于顶点着色阶段,另一个用于像素着色阶段。
由于这里的顶点信息还包含了颜色,我们只让像素颜色受环境光和漫反射光的影响,以凸显高光效果。
常用几何模型
在头文件Geometry.h中的名称空间Geometry内包含了许多常用的3D模型:球、立方体、圆柱体、圆锥体、平面和地形。调用它可以生成模型数据以写入顶点和索引缓冲区。
(2018/12/15更新)目前的几何模型网格数据采用模板形式,可以做到支持VertexPos,VertexPosColor,VertexPosTex,VertexPosNormalTex,VertexPosNormalColor和VertexPosNormalTangentTex的顶点(但不支持VertexPosSize)以及WORD,DWORD索引的输出。如果对tex和tangent部分的内容不清楚,建议先阅读完纹理映射和法线贴图后再回过头来看
(2020/1/19更新)几何模型网格数据默认将使用32位的DWORD类型
下面仅针对球、立方体、圆柱体和锥体部分进行展开:
namespace Geometry
{
// 网格数据
template<class VertexType = VertexPosNormalTex, class IndexType = DWORD>
struct MeshData
{
std::vector<VertexType> vertexVec; // 顶点数组
std::vector<IndexType> indexVec; // 索引数组
MeshData()
{
// 需检验索引类型合法性
static_assert(sizeof(IndexType) == 2 || sizeof(IndexType) == 4, "The size of IndexType must be 2 bytes or 4 bytes!");
static_assert(std::is_unsigned<IndexType>::value, "IndexType must be unsigned integer!");
}
};
// 创建球体网格数据,levels和slices越大,精度越高。
template<class VertexType = VertexPosNormalTex, class IndexType = DWORD>
MeshData<VertexType, IndexType> CreateSphere(float radius = 1.0f, UINT levels = 20, UINT slices = 20,
const DirectX::XMFLOAT4& color = { 1.0f, 1.0f, 1.0f, 1.0f });
// 创建立方体网格数据
template<class VertexType = VertexPosNormalTex, class IndexType = DWORD>
MeshData<VertexType, IndexType> CreateBox(float width = 2.0f, float height = 2.0f, float depth = 2.0f,
const DirectX::XMFLOAT4& color = { 1.0f, 1.0f, 1.0f, 1.0f });
// 创建圆柱体网格数据,slices越大,精度越高。
template<class VertexType = VertexPosNormalTex, class IndexType = DWORD>
MeshData<VertexType, IndexType> CreateCylinder(float radius = 1.0f, float height = 2.0f, UINT slices = 20,
const DirectX::XMFLOAT4& color = { 1.0f, 1.0f, 1.0f, 1.0f });
// 创建只有圆柱体侧面的网格数据,slices越大,精度越高
template<class VertexType = VertexPosNormalTex, class IndexType = DWORD>
MeshData<VertexType, IndexType> CreateCylinderNoCap(float radius = 1.0f, float height = 2.0f, UINT slices = 20,
const DirectX::XMFLOAT4& color = { 1.0f, 1.0f, 1.0f, 1.0f });
// 创建圆锥体网格数据,slices越大,精度越高。
template<class VertexType = VertexPosNormalTex, class IndexType = DWORD>
MeshData<VertexType, IndexType> CreateCone(float radius = 1.0f, float height = 2.0f, UINT slices = 20,
const DirectX::XMFLOAT4& color = { 1.0f, 1.0f, 1.0f, 1.0f });
// 创建只有圆锥体侧面网格数据,slices越大,精度越高。
template<class VertexType = VertexPosNormalTex, class IndexType = DWORD>
MeshData<VertexType, IndexType> CreateConeNoCap(float radius = 1.0f, float height = 2.0f, UINT slices = 20,
const DirectX::XMFLOAT4& color = { 1.0f, 1.0f, 1.0f, 1.0f });
}
为了能够保证支持前面提到的顶点类型,在内部实现中需要依赖VertexData产生完整的顶点数据,并根据顶点的类型进行针对性筛选保留,并输出到对应的顶点类型。其中筛选的核心,一是要建立元素语义与VertexData对应内存区间关系,二是要确定当前顶点需要插入的字节偏移位置。关于第一点,在下面的代码中,我们直接利用map建立映射关系
namespace Geometry
{
namespace Internal
{
//
// 以下结构体和函数仅供内部实现使用
//
struct VertexData
{
DirectX::XMFLOAT3 pos;
DirectX::XMFLOAT3 normal;
DirectX::XMFLOAT4 tangent;
DirectX::XMFLOAT4 color;
DirectX::XMFLOAT2 tex;
};
// 根据目标顶点类型选择性将数据插入
template<class VertexType>
inline void InsertVertexElement(VertexType& vertexDst, const VertexData& vertexSrc)
{
static std::string semanticName;
// 第一步,建立内存映射关系
static const std::map<std::string, std::pair<size_t, size_t>> semanticSizeMap = {
{"POSITION", std::pair<size_t, size_t>(0, 12)},
{"NORMAL", std::pair<size_t, size_t>(12, 24)},
{"TANGENT", std::pair<size_t, size_t>(24, 40)},
{"COLOR", std::pair<size_t, size_t>(40, 56)},
{"TEXCOORD", std::pair<size_t, size_t>(56, 64)}
};
// 第二步...
}
}
// ...
上面的pair对应了VertexData指定语义的元素所在的内存区间。
而关于第二点,就是要确定当前我要赋值的顶点元素目前处理到第几个成员,其字节偏移量是多少。这些可以使用顶点的成员布局来实现,比如VertexPosNormalTex:
struct VertexPosNormalTex
{
DirectX::XMFLOAT3 pos;
DirectX::XMFLOAT3 normal;
DirectX::XMFLOAT2 tex;
static const D3D11_INPUT_ELEMENT_DESC inputLayout[3];
};
const D3D11_INPUT_ELEMENT_DESC VertexPosNormalTex::inputLayout[3] = {
{ "POSITION", 0, DXGI_FORMAT_R32G32B32_FLOAT, 0, 0, D3D11_INPUT_PER_VERTEX_DATA, 0 },
{ "NORMAL", 0, DXGI_FORMAT_R32G32B32_FLOAT, 0, 12, D3D11_INPUT_PER_VERTEX_DATA, 0 },
{ "TEXCOORD", 0, DXGI_FORMAT_R32G32_FLOAT, 0, 24, D3D11_INPUT_PER_VERTEX_DATA, 0 }
};
最后就是顶点元素插入的实现:
// 根据目标顶点类型选择性将数据插入
template<class VertexType>
inline void Geometry::InsertVertexElement(VertexType& vertexDst, const VertexData& vertexSrc)
{
static std::string semanticName;
// 第一步,建立内存映射关系
static const std::map<std::string, std::pair<size_t, size_t>> semanticSizeMap = {
{"POSITION", std::pair<size_t, size_t>(0, 12)},
{"NORMAL", std::pair<size_t, size_t>(12, 24)},
{"TANGENT", std::pair<size_t, size_t>(24, 40)},
{"COLOR", std::pair<size_t, size_t>(40, 56)},
{"TEXCOORD", std::pair<size_t, size_t>(56, 64)}
};
// 第二步,确定当前顶点需要插入的字节偏移位置
for (size_t i = 0; i < ARRAYSIZE(VertexType::inputLayout); i++)
{
semanticName = VertexType::inputLayout[i].SemanticName;
const auto& range = Geometry::semanticSizeMap.at(semanticName);
memcpy_s(reinterpret_cast<char*>(&vertexDst) + VertexType::inputLayout[i].AlignedByteOffset,
range.second - range.first,
reinterpret_cast<const char*>(&vertexSrc) + range.first,
range.second - range.first);
}
}
Geometry::CreateBox函数--创建立方体
该函数会创建包含24个顶点的数组(立方体一个顶点重复3次,但法向量不相同),以及一个含36个索引的数组:
template<class VertexType, class IndexType>
inline MeshData<VertexType, IndexType> CreateBox(float width, float height, float depth, const DirectX::XMFLOAT4 & color)
{
using namespace DirectX;
MeshData<VertexType, IndexType> meshData;
meshData.vertexVec.resize(24);
Internal::VertexData vertexDataArr[24];
float w2 = width / 2, h2 = height / 2, d2 = depth / 2;
// 右面(+X面)
vertexDataArr[0].pos = XMFLOAT3(w2, -h2, -d2);
vertexDataArr[1].pos = XMFLOAT3(w2, h2, -d2);
vertexDataArr[2].pos = XMFLOAT3(w2, h2, d2);
vertexDataArr[3].pos = XMFLOAT3(w2, -h2, d2);
// 左面(-X面)
vertexDataArr[4].pos = XMFLOAT3(-w2, -h2, d2);
vertexDataArr[5].pos = XMFLOAT3(-w2, h2, d2);
vertexDataArr[6].pos = XMFLOAT3(-w2, h2, -d2);
vertexDataArr[7].pos = XMFLOAT3(-w2, -h2, -d2);
// 顶面(+Y面)
vertexDataArr[8].pos = XMFLOAT3(-w2, h2, -d2);
vertexDataArr[9].pos = XMFLOAT3(-w2, h2, d2);
vertexDataArr[10].pos = XMFLOAT3(w2, h2, d2);
vertexDataArr[11].pos = XMFLOAT3(w2, h2, -d2);
// 底面(-Y面)
vertexDataArr[12].pos = XMFLOAT3(w2, -h2, -d2);
vertexDataArr[13].pos = XMFLOAT3(w2, -h2, d2);
vertexDataArr[14].pos = XMFLOAT3(-w2, -h2, d2);
vertexDataArr[15].pos = XMFLOAT3(-w2, -h2, -d2);
// 背面(+Z面)
vertexDataArr[16].pos = XMFLOAT3(w2, -h2, d2);
vertexDataArr[17].pos = XMFLOAT3(w2, h2, d2);
vertexDataArr[18].pos = XMFLOAT3(-w2, h2, d2);
vertexDataArr[19].pos = XMFLOAT3(-w2, -h2, d2);
// 正面(-Z面)
vertexDataArr[20].pos = XMFLOAT3(-w2, -h2, -d2);
vertexDataArr[21].pos = XMFLOAT3(-w2, h2, -d2);
vertexDataArr[22].pos = XMFLOAT3(w2, h2, -d2);
vertexDataArr[23].pos = XMFLOAT3(w2, -h2, -d2);
for (UINT i = 0; i < 4; ++i)
{
// 右面(+X面)
vertexDataArr[i].normal = XMFLOAT3(1.0f, 0.0f, 0.0f);
vertexDataArr[i].tangent = XMFLOAT4(0.0f, 0.0f, 1.0f, 1.0f);
vertexDataArr[i].color = color;
// 左面(-X面)
vertexDataArr[i + 4].normal = XMFLOAT3(-1.0f, 0.0f, 0.0f);
vertexDataArr[i + 4].tangent = XMFLOAT4(0.0f, 0.0f, -1.0f, 1.0f);
vertexDataArr[i + 4].color = color;
// 顶面(+Y面)
vertexDataArr[i + 8].normal = XMFLOAT3(0.0f, 1.0f, 0.0f);
vertexDataArr[i + 8].tangent = XMFLOAT4(1.0f, 0.0f, 0.0f, 1.0f);
vertexDataArr[i + 8].color = color;
// 底面(-Y面)
vertexDataArr[i + 12].normal = XMFLOAT3(0.0f, -1.0f, 0.0f);
vertexDataArr[i + 12].tangent = XMFLOAT4(-1.0f, 0.0f, 0.0f, 1.0f);
vertexDataArr[i + 12].color = color;
// 背面(+Z面)
vertexDataArr[i + 16].normal = XMFLOAT3(0.0f, 0.0f, 1.0f);
vertexDataArr[i + 16].tangent = XMFLOAT4(-1.0f, 0.0f, 0.0f, 1.0f);
vertexDataArr[i + 16].color = color;
// 正面(-Z面)
vertexDataArr[i + 20].normal = XMFLOAT3(0.0f, 0.0f, -1.0f);
vertexDataArr[i + 20].tangent = XMFLOAT4(1.0f, 0.0f, 0.0f, 1.0f);
vertexDataArr[i + 20].color = color;
}
for (UINT i = 0; i < 6; ++i)
{
vertexDataArr[i * 4].tex = XMFLOAT2(0.0f, 1.0f);
vertexDataArr[i * 4 + 1].tex = XMFLOAT2(0.0f, 0.0f);
vertexDataArr[i * 4 + 2].tex = XMFLOAT2(1.0f, 0.0f);
vertexDataArr[i * 4 + 3].tex = XMFLOAT2(1.0f, 1.0f);
}
for (UINT i = 0; i < 24; ++i)
{
Internal::InsertVertexElement(meshData.vertexVec[i], vertexDataArr[i]);
}
meshData.indexVec = {
0, 1, 2, 2, 3, 0, // 右面(+X面)
4, 5, 6, 6, 7, 4, // 左面(-X面)
8, 9, 10, 10, 11, 8, // 顶面(+Y面)
12, 13, 14, 14, 15, 12, // 底面(-Y面)
16, 17, 18, 18, 19, 16, // 背面(+Z面)
20, 21, 22, 22, 23, 20 // 正面(-Z面)
};
return meshData;
}
Geometry::CreateSphere函数--创建球体
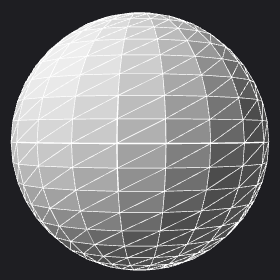
由于3D模型都是用三角形模拟的,这里的球体如果想要效果更佳逼真,需要用到更多的三角形。球体的法向量如前面所述,使用微分法求出。在提供参数的时候,levels决定上下分多少层,slices决定一个水平圆切面的顶点数目。levels和slices越高,生成的顶点数、索引数都会越多。
template<class VertexType, class IndexType>
inline MeshData<VertexType, IndexType> CreateSphere(float radius, UINT levels, UINT slices, const DirectX::XMFLOAT4 & color)
{
using namespace DirectX;
MeshData<VertexType, IndexType> meshData;
UINT vertexCount = 2 + (levels - 1) * (slices + 1);
UINT indexCount = 6 * (levels - 1) * slices;
meshData.vertexVec.resize(vertexCount);
meshData.indexVec.resize(indexCount);
Internal::VertexData vertexData;
IndexType vIndex = 0, iIndex = 0;
float phi = 0.0f, theta = 0.0f;
float per_phi = XM_PI / levels;
float per_theta = XM_2PI / slices;
float x, y, z;
// 放入顶端点
vertexData = { XMFLOAT3(0.0f, radius, 0.0f), XMFLOAT3(0.0f, 1.0f, 0.0f), XMFLOAT4(1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(0.0f, 0.0f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
for (UINT i = 1; i < levels; ++i)
{
phi = per_phi * i;
// 需要slices + 1个顶点是因为 起点和终点需为同一点,但纹理坐标值不一致
for (UINT j = 0; j <= slices; ++j)
{
theta = per_theta * j;
x = radius * sinf(phi) * cosf(theta);
y = radius * cosf(phi);
z = radius * sinf(phi) * sinf(theta);
// 计算出局部坐标、法向量、Tangent向量和纹理坐标
XMFLOAT3 pos = XMFLOAT3(x, y, z), normal;
XMStoreFloat3(&normal, XMVector3Normalize(XMLoadFloat3(&pos)));
vertexData = { pos, normal, XMFLOAT4(-sinf(theta), 0.0f, cosf(theta), 1.0f), color, XMFLOAT2(theta / XM_2PI, phi / XM_PI) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
}
}
// 放入底端点
vertexData = { XMFLOAT3(0.0f, -radius, 0.0f), XMFLOAT3(0.0f, -1.0f, 0.0f),
XMFLOAT4(-1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(0.0f, 1.0f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
// 逐渐放入索引
if (levels > 1)
{
for (UINT j = 1; j <= slices; ++j)
{
meshData.indexVec[iIndex++] = 0;
meshData.indexVec[iIndex++] = j % (slices + 1) + 1;
meshData.indexVec[iIndex++] = j;
}
}
for (UINT i = 1; i < levels - 1; ++i)
{
for (UINT j = 1; j <= slices; ++j)
{
meshData.indexVec[iIndex++] = (i - 1) * (slices + 1) + j;
meshData.indexVec[iIndex++] = (i - 1) * (slices + 1) + j % (slices + 1) + 1;
meshData.indexVec[iIndex++] = i * (slices + 1) + j % (slices + 1) + 1;
meshData.indexVec[iIndex++] = i * (slices + 1) + j % (slices + 1) + 1;
meshData.indexVec[iIndex++] = i * (slices + 1) + j;
meshData.indexVec[iIndex++] = (i - 1) * (slices + 1) + j;
}
}
// 逐渐放入索引
if (levels > 1)
{
for (UINT j = 1; j <= slices; ++j)
{
meshData.indexVec[iIndex++] = (levels - 2) * (slices + 1) + j;
meshData.indexVec[iIndex++] = (levels - 2) * (slices + 1) + j % (slices + 1) + 1;
meshData.indexVec[iIndex++] = (levels - 1) * (slices + 1) + 1;
}
}
return meshData;
}
Geometry::CreateCylinderNoCap函数--创建圆柱体的侧面
由于后续项目要用到无上下圆面的圆柱体,故拆分出来单独实现:
template<class VertexType, class IndexType>
inline MeshData<VertexType, IndexType> CreateCylinderNoCap(float radius, float height, UINT slices, UINT stacks, float texU, float texV, const DirectX::XMFLOAT4 & color)
{
using namespace DirectX;
MeshData<VertexType, IndexType> meshData;
UINT vertexCount = (slices + 1) * (stacks + 1);
UINT indexCount = 6 * slices * stacks;
meshData.vertexVec.resize(vertexCount);
meshData.indexVec.resize(indexCount);
float h2 = height / 2;
float theta = 0.0f;
float per_theta = XM_2PI / slices;
float stackHeight = height / stacks;
Internal::VertexData vertexData;
// 自底向上铺设侧面端点
UINT vIndex = 0;
for (UINT i = 0; i < stacks + 1; ++i)
{
float y = -h2 + i * stackHeight;
// 当前层顶点
for (UINT j = 0; j <= slices; ++j)
{
theta = j * per_theta;
float u = theta / XM_2PI;
float v = 1.0f - (float)i / stacks;
vertexData = { XMFLOAT3(radius * cosf(theta), y, radius * sinf(theta)), XMFLOAT3(cosf(theta), 0.0f, sinf(theta)),
XMFLOAT4(-sinf(theta), 0.0f, cosf(theta), 1.0f), color, XMFLOAT2(u * texU, v * texV) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
}
}
// 放入索引
UINT iIndex = 0;
for (UINT i = 0; i < stacks; ++i)
{
for (UINT j = 0; j < slices; ++j)
{
meshData.indexVec[iIndex++] = i * (slices + 1) + j;
meshData.indexVec[iIndex++] = (i + 1) * (slices + 1) + j;
meshData.indexVec[iIndex++] = (i + 1) * (slices + 1) + j + 1;
meshData.indexVec[iIndex++] = i * (slices + 1) + j;
meshData.indexVec[iIndex++] = (i + 1) * (slices + 1) + j + 1;
meshData.indexVec[iIndex++] = i * (slices + 1) + j + 1;
}
}
return meshData;
}
Geometry::CreateCylinder函数--创建圆柱体
圆柱体侧面可以调用上面的函数,剩下的两个圆盖在这完成:
template<class VertexType, class IndexType>
inline MeshData<VertexType, IndexType> CreateCylinder(float radius, float height, UINT slices, UINT stacks, float texU, float texV, const DirectX::XMFLOAT4 & color)
{
using namespace DirectX;
auto meshData = CreateCylinderNoCap<VertexType, IndexType>(radius, height, slices, stacks, texU, texV, color);
UINT vertexCount = (slices + 1) * (stacks + 3) + 2;
UINT indexCount = 6 * slices * (stacks + 1);
meshData.vertexVec.resize(vertexCount);
meshData.indexVec.resize(indexCount);
float h2 = height / 2;
float theta = 0.0f;
float per_theta = XM_2PI / slices;
IndexType vIndex = (slices + 1) * (stacks + 1), iIndex = 6 * slices * stacks;
IndexType offset = vIndex;
Internal::VertexData vertexData;
// 放入顶端圆心
vertexData = { XMFLOAT3(0.0f, h2, 0.0f), XMFLOAT3(0.0f, 1.0f, 0.0f),
XMFLOAT4(1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(0.5f, 0.5f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
// 放入顶端圆上各点
for (UINT i = 0; i <= slices; ++i)
{
theta = i * per_theta;
float u = cosf(theta) * radius / height + 0.5f;
float v = sinf(theta) * radius / height + 0.5f;
vertexData = { XMFLOAT3(radius * cosf(theta), h2, radius * sinf(theta)), XMFLOAT3(0.0f, 1.0f, 0.0f),
XMFLOAT4(1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(u, v) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
}
// 放入底端圆心
vertexData = { XMFLOAT3(0.0f, -h2, 0.0f), XMFLOAT3(0.0f, -1.0f, 0.0f),
XMFLOAT4(-1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(0.5f, 0.5f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
// 放入底部圆上各点
for (UINT i = 0; i <= slices; ++i)
{
theta = i * per_theta;
float u = cosf(theta) * radius / height + 0.5f;
float v = sinf(theta) * radius / height + 0.5f;
vertexData = { XMFLOAT3(radius * cosf(theta), -h2, radius * sinf(theta)), XMFLOAT3(0.0f, -1.0f, 0.0f),
XMFLOAT4(-1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(u, v) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
}
// 放入顶部三角形索引
for (UINT i = 1; i <= slices; ++i)
{
meshData.indexVec[iIndex++] = offset;
meshData.indexVec[iIndex++] = offset + i % (slices + 1) + 1;
meshData.indexVec[iIndex++] = offset + i;
}
// 放入底部三角形索引
offset += slices + 2;
for (UINT i = 1; i <= slices; ++i)
{
meshData.indexVec[iIndex++] = offset;
meshData.indexVec[iIndex++] = offset + i;
meshData.indexVec[iIndex++] = offset + i % (slices + 1) + 1;
}
return meshData;
}
Geometry::CreateConeNoCap函数--创建圆锥体的侧面
该函数不包含底部的圆形面,注意圆锥的尖端因为各自所处的三角形法向量不一致,需要创建和底部圆相同的数目的顶点:
template<class VertexType, class IndexType>
MeshData<VertexType, IndexType> CreateConeNoCap(float radius, float height, UINT slices, const DirectX::XMFLOAT4& color)
{
using namespace DirectX;
MeshData<VertexType, IndexType> meshData;
meshData.vertexVec.resize(2 * slices);
meshData.indexVec.resize(3 * slices);
float h2 = height / 2;
float theta = 0.0f;
float per_theta = XM_2PI / slices;
float len = sqrtf(height * height + radius * radius);
UINT iIndex = 0;
UINT vIndex = 0;
Internal::VertexData vertexData;
// 放入圆锥尖端顶点(每个顶点包含不同的法向量和切线向量)
for (UINT i = 0; i < slices; ++i)
{
theta = i * per_theta + per_theta / 2;
vertexData = { XMFLOAT3(0.0f, h2, 0.0f), XMFLOAT3(radius * cosf(theta) / len, height / len, radius * sinf(theta) / len),
XMFLOAT4(-sinf(theta), 0.0f, cosf(theta), 1.0f), color, XMFLOAT2(0.5f, 0.5f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
}
// 放入圆锥底面顶点
for (UINT i = 0; i < slices; ++i)
{
theta = i * per_theta;
vertexData = { XMFLOAT3(radius * cosf(theta), -h2, radius * sinf(theta)), XMFLOAT3(radius * cosf(theta) / len, height / len, radius * sinf(theta) / len),
XMFLOAT4(-sinf(theta), 0.0f, cosf(theta), 1.0f), color, XMFLOAT2(cosf(theta) / 2 + 0.5f, sinf(theta) / 2 + 0.5f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
}
// 放入索引
for (UINT i = 0; i < slices; ++i)
{
meshData.indexVec[iIndex++] = i;
meshData.indexVec[iIndex++] = slices + (i + 1) % slices;
meshData.indexVec[iIndex++] = slices + i % slices;
}
return meshData;
}
Geometry::CreateCone函数--创建圆锥体
template<class VertexType, class IndexType>
MeshData<VertexType, IndexType> CreateCone(float radius, float height, UINT slices, const DirectX::XMFLOAT4& color)
{
using namespace DirectX;
auto meshData = CreateConeNoCap<VertexType, IndexType>(radius, height, slices, color);
UINT vertexCount = 3 * slices + 1;
UINT indexCount = 6 * slices;
meshData.vertexVec.resize(vertexCount);
meshData.indexVec.resize(indexCount);
float h2 = height / 2;
float theta = 0.0f;
float per_theta = XM_2PI / slices;
UINT iIndex = 3 * slices;
UINT vIndex = 2 * slices;
Internal::VertexData vertexData;
// 放入圆锥底面顶点
for (UINT i = 0; i < slices; ++i)
{
theta = i * per_theta;
vertexData = { XMFLOAT3(radius * cosf(theta), -h2, radius * sinf(theta)), XMFLOAT3(0.0f, -1.0f, 0.0f),
XMFLOAT4(-1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(cosf(theta) / 2 + 0.5f, sinf(theta) / 2 + 0.5f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
}
vertexData = { XMFLOAT3(0.0f, -h2, 0.0f), XMFLOAT3(0.0f, -1.0f, 0.0f),
XMFLOAT4(-1.0f, 0.0f, 0.0f, 1.0f), color, XMFLOAT2(0.5f, 0.5f) };
Internal::InsertVertexElement(meshData.vertexVec[vIndex++], vertexData);
// 放入索引
UINT offset = 2 * slices;
for (UINT i = 0; i < slices; ++i)
{
meshData.indexVec[iIndex++] = offset + slices;
meshData.indexVec[iIndex++] = offset + i % slices;
meshData.indexVec[iIndex++] = offset + (i + 1) % slices;
}
return meshData;
}
剩下关于平面的创建可以在项目源码中阅读。
光栅化状态
Direct3D是基于状态机的,我们可以通过修改这些状态来修改渲染管线的当前行为。有三种状态值得我们现在以及后续留意:
- 光栅化状态(光栅化阶段)
- 混合状态(输出合并阶段)
- 深度/模板状态(输出合并阶段)
光栅化阶段尽管是不可编程的,但在该阶段需要完成许多任务:
- 顶点着色器、几何着色器完成了顶点输出后,光栅化阶段会负责对前面传来的顶点数据,尤其是对4D位置向量(SV_POSITION)进行处理。首先,根据光栅化状态来决定顶点顺(逆)时针排布的三角形是否通过,否则进行三角形剔除。
- 其次,对三角形的三个顶点进行范围裁剪,要求范围为:\(-w\leq x\leq w; -w\leq y\leq w; 0\leq z\leq w; 0<w\) 。若存在部分点位于裁剪空间外,则需要通过一种特定的算法,计算与裁剪平面的交点的方式以保留位于裁剪空间内的多边形。
- 进行透视除法,归一化W值。
- 根据剩下的三角形(裁剪得到的多边形实际上是多个三角形),进行某种扫描线遍历算法,找出位于三角形的所有像素,在这个过程中,根据三角形的三个顶点,光栅化就可以通过透视校正插值法对顶点内的所有成员(如位置,颜色,法向量等)进行插值运算,也正因为如此你才能在第二章看到高洛德着色(Gouraud Shading)呈现的渐变效果。
- 对透视除法后的坐标点进行视口变换,此时在像素着色器中
SV_POSITION的x分量和y分量都已经经过视口变换成为最终的屏幕坐标,且带有小数点0.5,这是因为要取到像素的中心位置,即对于800x600的视口区域,实际上的屏幕坐标取值范围为[0.5, 799.5]x[0.5, 599.5],这一点读者可以修改像素着色器使得SV_POSITION与像素颜色结果有关联,然后进入调试以验证。 - 如果开启多重采样的话也会在步骤4-5的时候进行,但这里不详细展开
- 如果开启了Scissor,我们需要指定额外的裁剪矩形(Scissor Rect)来确定保留区域, 由于裁剪矩形的区域是像素范围,需要在视口变换后进行。这时候会对矩形区域外的像素点丢弃掉。默认情况下这些三角形使用第一个Scissor Rect。非默认的情况可以自行查阅文档了解,这属于后面的内容。
- 对深度值进行偏移,在目前的章节我们不会使用,可以当做偏移为0。深度偏移是在裁剪之后进行的,通常用于阴影贴图。
- 最终这些像素点将会进入到像素着色阶段。
ID3D11Device::CreateRasterizerState方法--创建光栅化状态
在创建光栅化状态前,我们需要先填充D3D11_RASTERIZER_DESC结构体来描述光栅化状态:
typedef struct D3D11_RASTERIZER_DESC
{
D3D11_FILL_MODE FillMode; // 填充模式
D3D11_CULL_MODE CullMode; // 裁剪模式
BOOL FrontCounterClockwise; // 是否三角形顶点按逆时针排布时为正面
INT DepthBias; // 深度偏移相关,目前忽略
FLOAT DepthBiasClamp; // 深度偏移相关,目前忽略
FLOAT SlopeScaledDepthBias; // 深度偏移相关,目前忽略
BOOL DepthClipEnable; // 是否允许深度测试将范围外的像素进行裁剪,默认TRUE
BOOL ScissorEnable; // 是否允许指定矩形范围的裁剪,若TRUE,则需要在RSSetScissor设置像素保留的矩形区域
BOOL MultisampleEnable; // 是否允许多重采样
BOOL AntialiasedLineEnable; // 是否允许反走样线,仅当多重采样为FALSE时才有效
} D3D11_RASTERIZER_DESC;
对于枚举类型D3D11_FILL_MODE有如下枚举值:
| 枚举值 | 含义 |
|---|---|
| D3D11_FILL_WIREFRAME = 2 | 线框填充方式 |
| D3D11_FILL_SOLID = 3 | 面填充方式 |
枚举类型D3D11_CULL_MODE有如下枚举值:
| 枚举值 | 含义 |
|---|---|
| D3D11_CULL_NONE = 1 | 无背面裁剪,即三角形无论处在视野的正面还是背面都能看到 |
| D3D11_CULL_FRONT = 2 | 对处在视野正面的三角形进行裁剪 |
| D3D11_CULL_BACK = 3 | 对处在视野背面的三角形进行裁剪 |
光栅化创建的方法如下:
HRESULT ID3D11Device::CreateRasterizerState(
const D3D11_RASTERIZER_DESC *pRasterizerDesc, // [In]光栅化状态描述
ID3D11RasterizerState **ppRasterizerState) = 0; // [Out]输出光栅化状态
ID3D11DeviceContext::RSSetState方法--设置光栅化状态
void ID3D11DeviceContext::RSSetState(
ID3D11RasterizerState *pRasterizerState); // [In]光栅化状态,若为nullptr,则使用默认光栅化状态
默认光栅化状态如下:
FillMode = D3D11_FILL_SOLID;
CullMode = D3D11_CULL_BACK;
FrontCounterClockwise = FALSE;
DepthBias = 0;
SlopeScaledDepthBias = 0.0f;
DepthBiasClamp = 0.0f;
DepthClipEnable = TRUE;
ScissorEnable = FALSE;
MultisampleEnable = FALSE;
AntialiasedLineEnable = FALSE;
绘制线框
绘制线框有两种方式:
- 在输入装配阶段,以图元linelist的方式进行装配,然后还修改索引缓冲区,使得每两个索引对应一条线。
- 修改光栅化阶段,以线框(wireframe)的方式进行像素点的标记。
显然,第2种方式操作起来会更加容易一些。
首先我们需要创建线框绘制的光栅化状态:
// ******************
// 初始化光栅化状态
//
D3D11_RASTERIZER_DESC rasterizerDesc;
ZeroMemory(&rasterizerDesc, sizeof(rasterizerDesc));
rasterizerDesc.FillMode = D3D11_FILL_WIREFRAME;
rasterizerDesc.CullMode = D3D11_CULL_NONE;
rasterizerDesc.FrontCounterClockwise = false;
rasterizerDesc.DepthClipEnable = true;
HR(m_pd3dDevice->CreateRasterizerState(&rasterizerDesc, m_pRSWireframe.GetAddressOf()));
然后绘制线框的时候只需要这样调用:
m_pd3dImmediateContext->RSSetState(m_pRSWireframe.Get());
如果想要恢复正常的面绘制,上述传入nullptr即可。
GameApp类
GameApp类的变化如下:
class GameApp : public D3DApp
{
public:
struct VSConstantBuffer
{
DirectX::XMMATRIX world;
DirectX::XMMATRIX view;
DirectX::XMMATRIX proj;
DirectX::XMMATRIX worldInvTranspose;
};
struct PSConstantBuffer
{
DirectionalLight dirLight;
PointLight pointLight;
SpotLight spotLight;
Material material;
DirectX::XMFLOAT4 eyePos;
};
public:
GameApp(HINSTANCE hInstance);
~GameApp();
bool Init();
void OnResize();
void UpdateScene(float dt);
void DrawScene();
private:
bool InitEffect();
bool InitResource();
bool ResetMesh(const Geometry::MeshData<VertexPosNormalColor>& meshData);
private:
ComPtr<ID3D11InputLayout> m_pVertexLayout; // 顶点输入布局
ComPtr<ID3D11Buffer> m_pVertexBuffer; // 顶点缓冲区
ComPtr<ID3D11Buffer> m_pIndexBuffer; // 索引缓冲区
ComPtr<ID3D11Buffer> m_pConstantBuffers[2]; // 常量缓冲区
UINT m_IndexCount; // 绘制物体的索引数组大小
ComPtr<ID3D11VertexShader> m_pVertexShader; // 顶点着色器
ComPtr<ID3D11PixelShader> m_pPixelShader; // 像素着色器
VSConstantBuffer m_VSConstantBuffer; // 用于修改用于VS的GPU常量缓冲区的变量
PSConstantBuffer m_PSConstantBuffer; // 用于修改用于PS的GPU常量缓冲区的变量
DirectionalLight m_DirLight; // 默认环境光
PointLight m_PointLight; // 默认点光
SpotLight m_SpotLight; // 默认汇聚光
ComPtr<ID3D11RasterizerState> m_pRSWireframe; // 光栅化状态: 线框模式
bool m_IsWireframeMode; // 当前是否为线框模式
};
其中,LightHelper.h包含了前面描述的材质和三种光照模型的结构体
GameApp类中则新添加了几个结构体和对应的一些成员。
GameApp::ResetMesh方法--重新设置要使用的模型
该项目为了演示不同3D模型下的光照效果,创建了该方法用于重新设置要使用的模型,但在这里物体表面的颜色默认都被设置为白色。实现如下:
bool GameApp::ResetMesh(const Geometry::MeshData<VertexPosNormalColor>& meshData)
{
// 释放旧资源
m_pVertexBuffer.Reset();
m_pIndexBuffer.Reset();
// 设置顶点缓冲区描述
D3D11_BUFFER_DESC vbd;
ZeroMemory(&vbd, sizeof(vbd));
vbd.Usage = D3D11_USAGE_IMMUTABLE;
vbd.ByteWidth = (UINT)meshData.vertexVec.size() * sizeof(VertexPosNormalColor);
vbd.BindFlags = D3D11_BIND_VERTEX_BUFFER;
vbd.CPUAccessFlags = 0;
// 新建顶点缓冲区
D3D11_SUBRESOURCE_DATA InitData;
ZeroMemory(&InitData, sizeof(InitData));
InitData.pSysMem = meshData.vertexVec.data();
HR(m_pd3dDevice->CreateBuffer(&vbd, &InitData, m_pVertexBuffer.GetAddressOf()));
// 输入装配阶段的顶点缓冲区设置
UINT stride = sizeof(VertexPosNormalColor); // 跨越字节数
UINT offset = 0; // 起始偏移量
m_pd3dImmediateContext->IASetVertexBuffers(0, 1, m_pVertexBuffer.GetAddressOf(), &stride, &offset);
// 设置索引缓冲区描述
m_IndexCount = (UINT)meshData.indexVec.size();
D3D11_BUFFER_DESC ibd;
ZeroMemory(&ibd, sizeof(ibd));
ibd.Usage = D3D11_USAGE_IMMUTABLE;
ibd.ByteWidth = m_IndexCount * sizeof(DWORD);
ibd.BindFlags = D3D11_BIND_INDEX_BUFFER;
ibd.CPUAccessFlags = 0;
// 新建索引缓冲区
InitData.pSysMem = meshData.indexVec.data();
HR(m_pd3dDevice->CreateBuffer(&ibd, &InitData, m_pIndexBuffer.GetAddressOf()));
// 输入装配阶段的索引缓冲区设置
m_pd3dImmediateContext->IASetIndexBuffer(m_pIndexBuffer.Get(), DXGI_FORMAT_R32_UINT, 0);
return true;
}
GameApp::InitResource方法的变化
该方法初始化模型后,就会初始化常量缓冲区的数据,以及一些光照模型和物体材质。矩阵需要注意转置:
bool GameApp::InitResource()
{
// ******************
// 初始化网格模型
//
auto meshData = Geometry::CreateBox<VertexPosNormalColor>();
ResetMesh(meshData);
// ******************
// 设置常量缓冲区描述
//
D3D11_BUFFER_DESC cbd;
ZeroMemory(&cbd, sizeof(cbd));
cbd.Usage = D3D11_USAGE_DYNAMIC;
cbd.ByteWidth = sizeof(VSConstantBuffer);
cbd.BindFlags = D3D11_BIND_CONSTANT_BUFFER;
cbd.CPUAccessFlags = D3D11_CPU_ACCESS_WRITE;
// 新建用于VS和PS的常量缓冲区
HR(m_pd3dDevice->CreateBuffer(&cbd, nullptr, m_pConstantBuffers[0].GetAddressOf()));
cbd.ByteWidth = sizeof(PSConstantBuffer);
HR(m_pd3dDevice->CreateBuffer(&cbd, nullptr, m_pConstantBuffers[1].GetAddressOf()));
// ******************
// 初始化默认光照
// 方向光
m_DirLight.ambient = XMFLOAT4(0.2f, 0.2f, 0.2f, 1.0f);
m_DirLight.diffuse = XMFLOAT4(0.8f, 0.8f, 0.8f, 1.0f);
m_DirLight.specular = XMFLOAT4(0.5f, 0.5f, 0.5f, 1.0f);
m_DirLight.direction = XMFLOAT3(-0.577f, -0.577f, 0.577f);
// 点光
m_PointLight.position = XMFLOAT3(0.0f, 0.0f, -10.0f);
m_PointLight.ambient = XMFLOAT4(0.3f, 0.3f, 0.3f, 1.0f);
m_PointLight.diffuse = XMFLOAT4(0.7f, 0.7f, 0.7f, 1.0f);
m_PointLight.specular = XMFLOAT4(0.5f, 0.5f, 0.5f, 1.0f);
m_PointLight.att = XMFLOAT3(0.0f, 0.1f, 0.0f);
m_PointLight.range = 25.0f;
// 聚光灯
m_SpotLight.position = XMFLOAT3(0.0f, 0.0f, -5.0f);
m_SpotLight.direction = XMFLOAT3(0.0f, 0.0f, 1.0f);
m_SpotLight.ambient = XMFLOAT4(0.0f, 0.0f, 0.0f, 1.0f);
m_SpotLight.diffuse = XMFLOAT4(1.0f, 1.0f, 1.0f, 1.0f);
m_SpotLight.specular = XMFLOAT4(1.0f, 1.0f, 1.0f, 1.0f);
m_SpotLight.att = XMFLOAT3(1.0f, 0.0f, 0.0f);
m_SpotLight.spot = 12.0f;
m_SpotLight.range = 10000.0f;
// 初始化用于VS的常量缓冲区的值
m_VSConstantBuffer.world = XMMatrixIdentity();
m_VSConstantBuffer.view = XMMatrixTranspose(XMMatrixLookAtLH(
XMVectorSet(0.0f, 0.0f, -5.0f, 0.0f),
XMVectorSet(0.0f, 0.0f, 0.0f, 0.0f),
XMVectorSet(0.0f, 1.0f, 0.0f, 0.0f)
));
m_VSConstantBuffer.proj = XMMatrixTranspose(XMMatrixPerspectiveFovLH(XM_PIDIV2, AspectRatio(), 1.0f, 1000.0f));
m_VSConstantBuffer.worldInvTranspose = XMMatrixIdentity();
// 初始化用于PS的常量缓冲区的值
m_PSConstantBuffer.material.ambient = XMFLOAT4(0.5f, 0.5f, 0.5f, 1.0f);
m_PSConstantBuffer.material.diffuse = XMFLOAT4(1.0f, 1.0f, 1.0f, 1.0f);
m_PSConstantBuffer.material.specular = XMFLOAT4(0.5f, 0.5f, 0.5f, 5.0f);
// 使用默认平行光
m_PSConstantBuffer.dirLight = m_DirLight;
// 注意不要忘记设置此处的观察位置,否则高亮部分会有问题
m_PSConstantBuffer.eyePos = XMFLOAT4(0.0f, 0.0f, -5.0f, 0.0f);
// 更新PS常量缓冲区资源
D3D11_MAPPED_SUBRESOURCE mappedData;
HR(m_pd3dImmediateContext->Map(m_pConstantBuffers[1].Get(), 0, D3D11_MAP_WRITE_DISCARD, 0, &mappedData));
memcpy_s(mappedData.pData, sizeof(PSConstantBuffer), &m_PSConstantBuffer, sizeof(PSConstantBuffer));
m_pd3dImmediateContext->Unmap(m_pConstantBuffers[1].Get(), 0);
// ******************
// 初始化光栅化状态
//
D3D11_RASTERIZER_DESC rasterizerDesc;
ZeroMemory(&rasterizerDesc, sizeof(rasterizerDesc));
rasterizerDesc.FillMode = D3D11_FILL_WIREFRAME;
rasterizerDesc.CullMode = D3D11_CULL_NONE;
rasterizerDesc.FrontCounterClockwise = false;
rasterizerDesc.DepthClipEnable = true;
HR(m_pd3dDevice->CreateRasterizerState(&rasterizerDesc, m_pRSWireframe.GetAddressOf()));
// ******************
// 给渲染管线各个阶段绑定好所需资源
//
// 设置图元类型,设定输入布局
m_pd3dImmediateContext->IASetPrimitiveTopology(D3D11_PRIMITIVE_TOPOLOGY_TRIANGLELIST);
m_pd3dImmediateContext->IASetInputLayout(m_pVertexLayout.Get());
// 将着色器绑定到渲染管线
m_pd3dImmediateContext->VSSetShader(m_pVertexShader.Get(), nullptr, 0);
// VS常量缓冲区对应HLSL寄存于b0的常量缓冲区
m_pd3dImmediateContext->VSSetConstantBuffers(0, 1, m_pConstantBuffers[0].GetAddressOf());
// PS常量缓冲区对应HLSL寄存于b1的常量缓冲区
m_pd3dImmediateContext->PSSetConstantBuffers(1, 1, m_pConstantBuffers[1].GetAddressOf());
m_pd3dImmediateContext->PSSetShader(m_pPixelShader.Get(), nullptr, 0);
// ******************
// 设置调试对象名
//
D3D11SetDebugObjectName(m_pVertexLayout.Get(), "VertexPosNormalTexLayout");
D3D11SetDebugObjectName(m_pConstantBuffers[0].Get(), "VSConstantBuffer");
D3D11SetDebugObjectName(m_pConstantBuffers[1].Get(), "PSConstantBuffer");
D3D11SetDebugObjectName(m_pVertexShader.Get(), "Light_VS");
D3D11SetDebugObjectName(m_pPixelShader.Get(), "Light_PS");
return true;
}
GameApp::UpdateScene方法的变化
这里排除掉键盘操作的代码部分,重点需要观察world和worldInvTranspose的赋值:
void GameApp::UpdateScene(float dt)
{
static float phi = 0.0f, theta = 0.0f;
phi += 0.0001f, theta += 0.00015f;
XMMATRIX W = XMMatrixRotationX(phi) * XMMatrixRotationY(theta);
m_VSConstantBuffer.world = XMMatrixTranspose(W);
m_VSConstantBuffer.worldInvTranspose = XMMatrixTranspose(InverseTranspose(W));
// ...
// 更新常量缓冲区,让立方体转起来
D3D11_MAPPED_SUBRESOURCE mappedData;
HR(m_pd3dImmediateContext->Map(m_pConstantBuffers[0].Get(), 0, D3D11_MAP_WRITE_DISCARD, 0, &mappedData));
memcpy_s(mappedData.pData, sizeof(VSConstantBuffer), &m_VSConstantBuffer, sizeof(VSConstantBuffer));
m_pd3dImmediateContext->Unmap(m_pConstantBuffers[0].Get(), 0);
HR(m_pd3dImmediateContext->Map(m_pConstantBuffers[1].Get(), 0, D3D11_MAP_WRITE_DISCARD, 0, &mappedData));
memcpy_s(mappedData.pData, sizeof(PSConstantBuffer), &m_PSConstantBuffer, sizeof(PSConstantBuffer));
m_pd3dImmediateContext->Unmap(m_pConstantBuffers[1].Get(), 0);
}
下面的程序按1、2、3分别对应切换平行光、点光、聚光,按Q、W、E、R分别对应切换立方体、球体、柱体和圆锥体,按S则切换面模式或线框模式:
练习题
粗体字为自定义题目
- 尝试修改本章Demo的光照,让方向光只射出红光,点光灯只射出绿光,聚光灯只射出蓝光。
- 尝试修改本章Demo所用到的材质,让其只反射红光。
- 尝试修改本章Demo所用到的聚光灯,通过鼠标滚轮的形式,对光照汇聚强度增加/减少,范围为2-512,观察效果。
- 尝试修改本章Demo所用到的材质,看看如果镜面反射强度的值小于1会发生什么情况。
- 实现一个函数用于创建胶囊(capsule)几何体,需要指定上下半球的半径(radius)、柱体部分高度(height)、球面三角形切片数(slices)和上下半球的层级数(levels),并且实现顶点要包含位置(position)、法向量(normal)。若已经接触过纹理映射与法线贴图,则可以考虑额外实现纹理坐标(texcoord)和切线向量(tangent)
- 修改当前演示程序,首先禁用背面剔除(
D3D11_CULL_NONE)并运行程序;随后,再代以正面剔除(D3D11_CULL_FRONT)试之。用线框模式输出程序的绘图效果,可便于我们观察不同剔除模式之间的绘制差别。 - 利用光栅化状态,尝试同时画出立方体和其三角形边界(题图无光照)
DirectX11 With Windows SDK完整目录
欢迎加入QQ群: 727623616 可以一起探讨DX11,以及有什么问题也可以在这里汇报。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号