浅谈DFS,BFS,IDFS,A*等算法
搜索分为盲目搜索和启发搜索
下面列举OI常用的盲目搜索:
- dijkstra
- SPFA
- bfs
- dfs
- 双向bfs
- 迭代加深搜索(IDFS)
下面列举OI常用的启发搜索:
- 最佳优先搜索(A)
- A*
- IDA*
那么什么是盲目,什么是启发?
举个例子,假如你在学校操场,老师叫你去国旗那集合,你会怎么走?
假设你是瞎子,你看不到周围,那如果你运气差,那你可能需要把整个操场走完才能找到国旗。这便是盲目式搜索,即使知道目标地点,你可能也要走完整个地图。
假设你眼睛没问题,你看得到国旗,那我们只需要向着国旗的方向走就行了,我们不会傻到往国旗相反反向走,那没有意义。
这种有目的的走法,便被称为启发式的。
左图为bfs,右图为A
提供一个搜索可视化的链接https://qiao.github.io/PathFinding.js/visual/
搜索算法浅谈
DFS
基础中的基础,几乎所有题都可以出一档指数级复杂度暴力分给DFS,同时他的实现也是目录中提到的所有搜索算法中最简单的
dfs的核心思想是:不撞南墙不回头
举个例子:
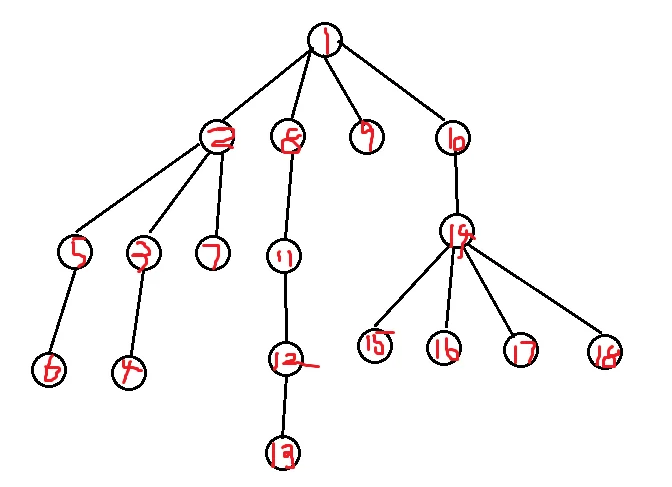
你现在在一号点,你想找到树中与一号点连通的每一个点
那么我们考虑按照深度优先的顺序去遍历这棵树,即,假设你当前在点x,如果和x连边的点中有一个点y,满足y比x深,即y是x的儿子,并且y还没有被访问过,那么我们就走到y,如果有多个y满足条件,我们走到其中任意一个
如果没有y满足条件,我们返回x的父亲
按照这个顺序,我们就可以访问到每个节点,并且每条边会恰好被走两次(从父亲到儿子一次,从儿子到父亲一次)
由于dfs的特性,它有时候会非常的浪费时间,为什么呢?
还是刚才这张图:
如果我们把终点设在10号点,在dfs的过程中要先搜完一号点及其三个子树才能到达终点
代码大体框架:
void dfs(int k){
if(到达目的地或满足条件)输出解
for(int i=1;i<=算符种数;++i){
保存结果//有时候不需要
dfs(k+1);
回溯结果//有时候不需要
}
}
那么什么时候需要回溯呢?
我们先要了解回溯的目的:
我们在搜索的过程中,先选择一种可能的情况向前搜索,一旦发现选择的结果是错误的,就退一步重新选择,这就需要回溯,向前搜索一步之后将状态恢复成之前的样子
所以在解题的过程中要判断好是否需要回溯
bfs
bfs利用了一种线性数据结构,队列
bfs的核心思想是:从厨师节点开始,生成第一层节点,检查目标节点是否在目标节点中,若没有再将第一层所有的节点逐一扩展,如此往复知道发现目标节点为止
我们再拿出徐瑞帆dalao的图:
你现在还是在一号点,你还是想找到树中与一号点连通的每一个点
我们初始的时候把一号点推入队取出队尾,然后只要当前队列非空,我们就取出队头元素x,并将队头弹出
然后我们将x的所有儿子推入队列
对于图上的情况,我们将所有与x相连,并且还没入过队的点推入队列
这样我们就能够访问所有点
代码大致框架:
void bfs(){
q.push(head);
while(!q.empty()){
temp=q.front;
q.pop();
if(temp为目标状态)输出解
if(temp不合法)continue;
if(temp合法)q.push(temp+Δ);
}
}
IDFS
我们已经学会了dfs和bfs
然而有的问题还是使我们无法进行搜索,因为你要进行搜索的图可能是无限大的,每个点所连的边也可能是无限多的,这就使得dfs和bfs都失效了,这时候我们就需要用到idfs
我们枚举深搜的时候深度的上限,因为深度上限的限制,图中的一些边会被删掉,而图就变成了一个有限的图,我们就可以进行dfs了
举个栗子:
如果用普通的dfs,这显然是一个无解的情况,你将会陷入无限的左子树中
这时,我们设一个深度d,每次搜到第d层就返回搜其他的分支。如果在d层没搜到答案则d++,从头再搜
然而这个算法有一个很明显的缺陷,有一些非答案点要重复搜好几遍,这造成了极大的浪费
于是我们有了IDA*
A*
在看IDA* 之前,我们先了解A*
搜索算法经常运行效率很低,为了提高效率,我们可以使用A*算法
我们对每个点定义一个估价函数f(x)=g(x)+h(x)
g(x)表示从起始点到x的实际代价
h(x)表示估计的从x到结束点的代价,并要求h(x)小于等于从x到结束点的实际代价
那么每次我们从可行点集合中找到f(x)最小的x,然后搜索他
这个过程可以用优先队列(即堆)实现
这样的话可以更快地到达结束点,并保证到达结束点时走的是最优路径
为什么要求h(x)小于等于实际代价呢?
因为如果h(x)大于实际代价的话,可能以一条非最优的路径走到结束点,导致答案变大
举个栗子:用A*做的八数码难题
#include<map>
#include<queue>
#include<iostream>
#include<algorithm>
using namespace std;
int dx[]={-1,0,0,1},dy[]={0,-1,1,0};
int final[]={-1,0,1,2,5,8,7,6,3};
struct node
{
int state,g,h;
node(int _state,int _g)
{
state=_state;
g=_g;
h=0;
int tmp=state;
for(int i=8;i>=0;i--)
{
int a=tmp%10;tmp/=10;
if(a!=0)h+=abs((i/3)-(final[a]/3))+abs((i%3)-(final[a]%3));
}
}
};
bool operator<(node x,node y)
{
return x.g+x.h>y.g+y.h;
}
priority_queue<node>q;
map<int,bool>vis;
int main()
{
int n;
cin>>n;
q.push(node(n,0));
vis[n]=1;
while(!q.empty())
{
node u=q.top();
int c[3][3],f=0,g=0,n=u.state;q.pop();
if(u.state==123804765)
{
cout<<u.g<<endl;
return 0;
}
for(int i=2;i>=0;i--)
for(int j=2;j>=0;j--)
{
c[i][j]=n%10,n/=10;
if(!c[i][j])f=i,g=j;
}
for(int i=0;i<4;i++)
{
int nx=f+dx[i],ny=g+dy[i],ns=0;
if(nx<0||ny<0||nx>2||ny>2)continue;
swap(c[nx][ny],c[f][g]);
for(int i=0;i<3;i++)
for(int j=0;j<3;j++)
ns=ns*10+c[i][j];
if(!vis.count(ns))
{
vis[ns]=1;
q.push(node(ns,u.g+1));
}
swap(c[nx][ny],c[f][g]);
}
}
}
这是bfs做法

这是A*做法

很明显,A*比bfs快多了
值得注意的是,A*只能在有解的情况下使用
IDA*
在进行IDFS的时候,我们也可以用A*进行搜索
如果在当前深度限制下搜到了结束状态,我们就可以直接输出答案
代码大体框架:
//1代表墙,0代表空地,2代表终点
int G[maxn][maxn];
int n, m;
int endx, endy;
int maxd;
const int dx[4] = { -1, 1, 0, 0 };
const int dy[4] = { 0, 0, -1, 1 };
namespace ida
{
bool dfs(int x, int y, int d);
inline int h(int x, int y);
bool ida_star(int x, int y, int d)
{
if (d == maxd) //是否搜到答案
{
if (G[x][y] == 2)
return true;
return false;
}
int f = h(x, y) + d; //评估函数
if (f > maxd) //maxd为最大深度
return false;
//尝试向左,向右,向上,向下走
for (int i = 0; i < 4; i++)
{
int next_x = x + dx[i];
int next_y = y + dy[i];
if (next_x > n || next_x < 1 || next_y > m || next_y < 1 || G[next_x][next_y] == 1)
continue;
if (ida_star(next_x, next_y, d + 1))
return true;
}
return false;
}
inline int h(int x, int y)
{
return abs(x - endx) + abs(y - endy);
}
}

