
极坐标系
定义
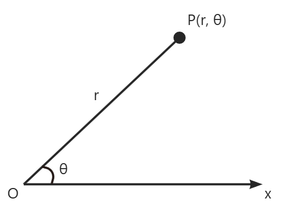
以极点\(O\)引一条射线做极轴\(Ox\),选定长度单位、角度单位(一般为弧度)及正方向(一般为逆时针),\(\lvert OP\rvert\)为点\(P\)的极径,记为\(r\),角\(xOP\)为点\(P\)的极角,记为\(\theta\),有序对\((r,\theta)\)叫做点\(P\)的极坐标,记为\(P(r,\theta)\)。
极坐标与直角坐标的转换
极坐标转换至直角坐标:
\(x=r\cos(\theta)\)(相当于\(r\)朝\(x\)轴投影)
\(y=r\sin(\theta)\)(相当于\(r\)朝\(y\)轴投影)
直角坐标转换至极坐标:
\(r=\sqrt{x^2+y^2}\)
\(\tan(\theta)=\frac{y}{x}(x\ne0)\)
球坐标系
定义
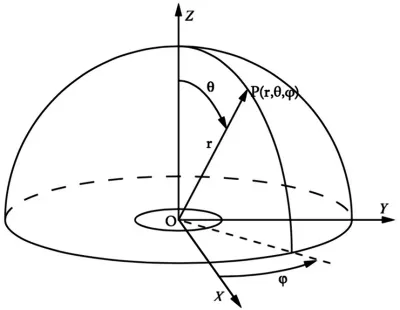
\(\vert OP\vert\)为点\(P\)到原点的距离,记为\(r\),\(OP\)与\(Z\)轴构成的夹角为点\(P\)的极角,记为\(\theta\),\(OP\)在\(XY\)平面的投影与\(X\)轴构成的夹角为点\(P\)的方位角,记为\(\varphi\),有序对\((r,\theta,\varphi)\)叫做点\(P\)的球坐标,记为\(P(r,\theta,\varphi)\),球坐标可视为极坐标的三维推广。
球坐标与直角坐标的转换:
球坐标转换至直角坐标:
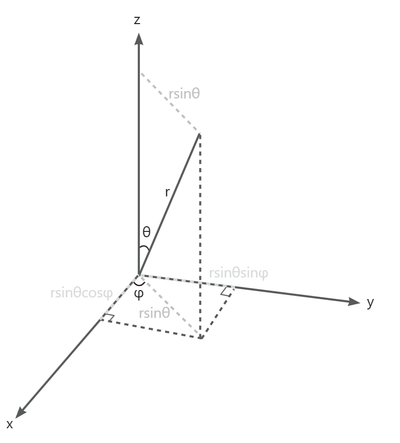
\(x=r\sin(\theta)\cos(\varphi)\)(相当于\(r\)先朝\(xy\)平面投影再朝\(x\)轴投影)
\(y=r\sin(\theta)sin(\varphi)\)(相当于\(r\)先朝\(xy\)平面投影再朝\(y\)轴投影)
\(z=r\cos(\theta)\)(相当于\(r\)朝\(z\)轴投影)
直角坐标转换至球坐标:
\(r=\sqrt{x^2+y^2+z^2}\)
\(\theta=\arccos(\frac{z}{r})=\arcsin\left(\frac{\sqrt{x^2+y^2}}{r}\right)=\arctan\left(\frac{\sqrt{x^2+y^2}}{z}\right)\)
\(\varphi=\arccos\left(\frac{x}{r\sin(\theta)}\right)=\arcsin\left(\frac{y}{r\sin(\theta)}\right)=\arctan\left(\frac{y}{x}\right)\)
计算\(\varphi\)时:
- 必须依照\((x,y)\)所处的象限来计算正确的反正切值。
- 当\(x=0\)时,判断\(y\)的值:
若\(y>0\),则\(\varphi=\frac{\pi}{2}\)
若\(y<0\),则\(\varphi=-\frac{\pi}{2}\)或\(\frac{3\pi}{2}\)
若\(y=0\),则\(\varphi\)为未定值(因为\(\frac{0}{0}\)为未定式)。
半球积分

沿方位角\(\varphi\)方向移动的弧对应的半径为\(r\sin(\varphi)\),对其弧长的微分等于\(r\sin\theta d\varphi\),沿极角\(\theta\)方向移动的弧对应的半径为\(r\),对其弧长的微分等于\(rd\theta\),则球面面积微分\(dA=r^2\sin\theta d\theta d\varphi\)
可得半球积分:
\(\int_0^{2\pi}\int_0^\frac{\pi}{2}r^2\sin\theta d\theta d\varphi\)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号