
二维旋转变换推导
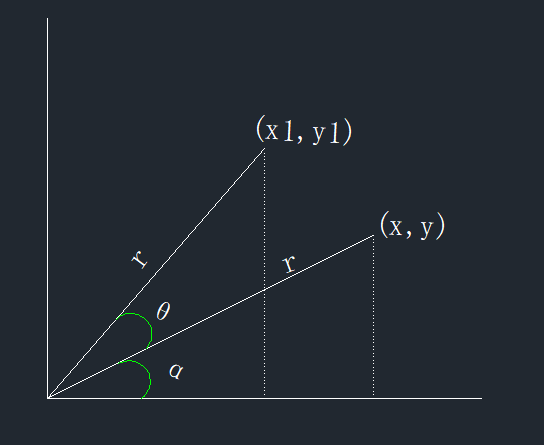
上图将向量(x,y)旋转到\((x_1,y_1)\),求旋转矩阵。即已知角度\(\theta\),问题表述为矩阵方程:
\[\begin{bmatrix}
x_1 \\
y_1
\end{bmatrix}
=
A*
\begin{bmatrix}
x \\
y
\end{bmatrix}
\]
求变换矩阵\(A\)。
方法一
利用平面几何的方法。
\[\begin{split}
x_1 = {}&cos(\theta+\alpha)*r\\
= {}&cos(\theta)*cos(\alpha)*r - sin(\theta)*sin(\alpha)*r\\
= {}& cos(\theta)*x-sin(\theta)*y
\end{split}
\]
\[\begin{split}
y_1 = {}&sin(\theta+\alpha)*r\\
= {}&sin(\theta)*cos(\alpha)*r+cos(\theta)*sin(\alpha)*r\\
= {}&sin(\theta)*x + cos(\theta)*y
\end{split}
\]
这个线性方程组写成矩阵形式,可得
\[A =
\begin{bmatrix}
cos(\theta) & -sin(\theta)\\
sin(\theta) & cos(\theta)
\end{bmatrix}
\]
方法二
利用线性变换的方法
\(R^2\)中的任意一点(x,y)经过旋转\(\theta\)后变为(x1,y1),求旋转矩阵。
这是一个线性变换,设变换为
\[T(X) = AX
\]
\(X\)为一个\(R^2\)的向量,按题意即是求变换矩阵\(A\)。
设\(I\)为\(R^2\)的单位矩阵,\(e\)为单位列向量。即:
\[ I = \begin{bmatrix}
1&0\\
0&1
\end{bmatrix}
=(e1,e2)
\]
按照直角坐标系理解,e1就是x轴上的(1,0)点,e2就是y轴上的(0,1)点。
\[X = x*e1 + y*e2
\]
由于是线性变换,所以
\[T(X) = T(x*e1 + y*e2)
= x*T(e1) + y*T(e2)
=\begin{bmatrix}
T(e1)&T(e2)
\end{bmatrix}*
\begin{bmatrix}
x\\y
\end{bmatrix}
\]
所以
\[A =\begin{bmatrix}
T(e1)&T(e2)
\end{bmatrix}
\]

\(T(e)\)通过平面几何可以很容易求出来。三角形的斜边长度是1,角度是\(\theta\),那么对边是\(sin(\theta)\),即x坐标,邻边是\(cos(\theta)\),即y坐标。
\[ T(e1) = \begin{bmatrix}
cos(\theta)\\
sin(\theta)
\end{bmatrix}
\]
同理求得:
\[ T(e2) = \begin{bmatrix}
-sin(\theta)\\
cos(\theta)
\end{bmatrix}
\]
因为旋转到x轴的负方向,所以取负值。
所以
\[ A = \begin{bmatrix}
cos(\theta)&-sin(\theta)\\
sin(\theta)&cos(\theta)
\end{bmatrix}
\]

 浙公网安备 33010602011771号
浙公网安备 33010602011771号